 基于無人機的無線通信系統的潛在優勢和應用分析
基于無人機的無線通信系統的潛在優勢和應用分析
當前無人機的應用飛速發展。無人機自身固有的機動性、靈活性和高度適當等特性使其在無線系統中有非常大的應用潛力。一方面,無人機可用作空中基站,增強無線網絡覆蓋、容量、可靠性和能效。另一方面,無人機可用作蜂窩網絡內的飛行移動終端。這種蜂窩連接的無人機可實現從實時視頻流到物品派送的多種應用。本文對無人機在無線通信中的潛在優勢和應用進行綜合分析。此外,全面研究了基于無人機的無線網絡所面臨的重要挑戰和基本權衡,探索了無人機面臨的重要挑戰,如三維部署、性能分析、信道建模和能效。而后,介紹了關于無人機通信方面存在的開放性問題和潛在研究方向。最后,對各種分析框架和數學工具,如優化理論、機器學習、隨機幾何、輸運理論和博弈論進行了描述,介紹如何使用這些工具解決解決無人機特有問題。簡言之,本文為分析、優化和設計基于無人機的無線通信系統提供了重要參考。
1、使用無人機的無線組網:激發應用案例
本節將簡要描述無人機無線中心部署的大量預期應用。這些應用來自各種場景,包括近期應用案例(如公共安全場景或熱點覆蓋)以及未來應用(如無人機用作緩存設備或物聯網使能器)。當然,在所有此類應用中,系統的用戶設備可以包括蜂窩連接的無人機用戶設備。
1.1 5G及5G后網絡中的無人機空中基站
本節討論無人機作為空中基站在5G網絡中的主要應用。
(1)5G及5G后無線蜂窩網絡的覆蓋和容量提升:現有無線網絡的容量和覆蓋極為緊張,為應對這一挑戰,出現了大量無線技術。這些技術被認為是5G蜂窩系統的核心,包括設備對設備(D2D)通信、超密集小區網絡和毫米波(mmW)通信。部署低空無人機可能是一種為蜂窩基礎設施有限地理區域提供無線連通的成本有效方法。高空平臺無人機可提供更長期的持續解決方案,為鄉村環境提供覆蓋。移動無人機在熱點和臨時事件期間,可按需提供連接、高數據率無線服務和流量卸載機會。
利用無人機實現毫米波通信也是一項頗具前景的應用,無人機與毫米波以及Massive MIMO技術,可以創建一種全新的動態飛行蜂窩網絡,提供大容量無線服務。無人機可以潛在提高D2D和車對車(V2V)通信無線鏈路的可靠性,同時利用發射分集。特別是飛行無人機可以幫助向地面設備廣播通用信息,從而減少設備之間的傳輸數量以降低地面網絡中的干擾。無人機基站可以使用空對空鏈路,服務于其他蜂窩連接的無人機-用戶設備,減輕地面網絡的負荷。
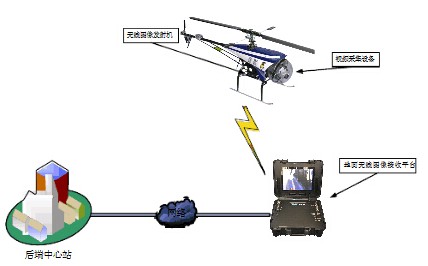
(2)無人機作為飛行基站,用于公共安全場景:用于公共安全場景的潛在寬帶無線技術包括4G LTE、WiFi、衛星通信以及專用公共安全系統。然而,自然災害發生時,這些技術可能無法提供靈活性、低延遲服務和快速適應環境的能力。在這方面,使用基于無人機的空中網絡(如圖1所示)是一種在公共安全場景中實現快速、靈活、可靠無線通信的有前景解決方案。由于無人機不需要靈活性極為受限且昂貴的基礎設施(例如,電纜),它們很容易動態改變位置,在應急態勢下為地面用戶提供按需通信。事實上,由于無人機的獨特功能,如機動性、靈活部署和快速重構,它們可以有效建立按需公共安全通信網絡。例如,無人機可以作為移動空中基站部署,為地面無線基礎設施受損地區提供寬帶連通能力。此外,飛行無人機能夠連續移動,在最短時間內為指定區域提供全面覆蓋。因此,使用無人機基站可能是在公共安全場景下提供快速泛在連通能力的適合解決方案。
圖1 公共安全場景中的無人機應用
(3)無人機輔助地面網絡,用于信息分發:由于無人機的機動性和視距環境,它們能夠為地面網絡進行信息分發和連通性增強提供支持。例如,如圖2所示,無人機可以用作飛行基站,協助D2D網絡或移動自組網在地面設備之間實現信息分發。雖然D2D網絡可以為卸載蜂窩數據流量和提高網絡容量和覆蓋提供有效解決方案,但由于設備之間通信距離短且存在干擾,網絡性能受到限制。在這種情況下,通過在地面設備之間智能傳播通用文件,飛行無人機可以促進信息的快速分發。例如,無人機輔助的D2D網絡可以實現在公共安全態勢下的緊急或疏散信息的快速傳播。
同樣,通過跨車輛傳播安全信息,無人機也可以在車載網絡(即V2V通信)中發揮關鍵作用。無人機還可以提高D2D和V2V通信鏈路的可靠性和連通性。一方面,使用無人機可以通過減少地面設備間的傳輸鏈路,減輕干擾。另一方面,飛行無人機可以引入發射分集,從而提高D2D、自組網和V2V網絡的可靠性和連通性。
圖2 無人機輔助的地面網絡
(4)3D MIMO與毫米波通信:由于無人機的空中位置及其在特定位置的按需部署能力,它們可被看作是飛行天線系統,利用它們可以進行大規模MIMO、3D MIMO和毫米波通信。例如,近年來,業界對于在地面蜂窩網絡中使用垂直和水平維度的3D MIMO(也被稱作全維度MIMO)有著巨大的興趣。如圖3所示,3D波束形成可同時在三維空間創建多個獨立的波束,從而減輕小區間干擾。相比傳統2D MIMO,3D MIMO解決方案可以產生更高的系統總吞吐量,且能為更多用戶提供支持。一般來說,3D MIMO更適用于這樣的場景:用戶數量多而且這些用戶以相對于其服務基站不同的仰角分布在三個維度上。由于無人機攜帶的飛行基站的高度高,根據相對于無人機的不同高度和仰角可以很容易地辨識地面用戶。此外,無人機載基站是利用3D MIMO的適合候選方案。
同樣,使用基于無人機的無線天線陣可為機載波束形成提供機會。無人機天線陣的陣元是單天線無人機,可以提供MIMO和波束形成機會,在下行和上行場景中有效服務于地面用戶。
無人機也可以成為毫米波通信的關鍵使能器。一方面,裝備毫米波能力的無人機可以建立到地面用戶的視距連接,減少在高頻段工作時的傳播損耗。另一方面,使用無人機上的小型天線(毫米波頻率),人們可以利用先進的MIMO技術(如大規模MIMO)進行毫米波通信。同時,無人機蜂群可以創建空中可重構天線陣列。
圖3 使用無人機的三維波束形成
(5)無人機用于物聯網通信:在物聯網環境中,高能效、超低延遲、高可靠性和高速上行通信成為主要挑戰。特別是,物聯網設備的電池非常受限,由于能量限制,通常不能實現遠距離發射。例如,在那些地面無線網絡覆蓋不穩定或不足的地區,由于功率限制,電池容量有限的物聯網設備無法將其數據傳到遙遠的基站。
使用移動無人機成為解決物聯網相關大量挑戰的頗具前景的解決方案。在以物聯網為中心的場景中,無人機可以作為飛行基站進行部署,提供可靠且高能效上行物聯網通信。無人機還可以通過基于物聯網設備的激活模式更新其位置,從而為大規模物聯網系統提供服務。
(6)支持緩存的無人機:在小基站(SBS)進行緩存已成為一種提高用戶吞吐量以及減小傳輸時延的頗具遠景的方法。然而,在頻繁越區切換情況下,在靜態地面基站緩存可能對于為移動用戶提供服務不是非常有效的。
無人機作為飛行基站能夠動態緩存大眾化內容,跟蹤對應用戶的移動性模式,然后為他們提供有效服務。事實上,使用支持緩存的無人機是一種在無線網絡中實現流量卸載的頗具遠景的解決方案。與傳統靜態小基站案例相比,部署支持緩存的無人機的另一優勢是可以降低緩存復雜度。例如,只要移動用戶移動到一個新小區,其請求的內容就需要存儲在新基站。然而,支持緩存的無人機可以跟蹤用戶的移動模式,因而,存儲在無人機上的內容將不再需要額外在小基站緩存。支持緩存的無人機可以跟蹤用戶移動模式,避免頻繁更新移動用戶的內容請求。因此,利用支持移動緩存的無人機,預測用戶的移動模式和內容請求信息,地面用戶可以獲得更有效服務。
1.2 蜂窩連接的無人機用作用戶設備
無人機可以充當無線基礎設施的用戶。無人機用戶可以用于數據包傳送、監視、遙感和虛擬現實應用。無人機用戶的主要優勢是它們為了迅速完成任務能夠快速移動和優化其路徑。為了把無人機正確用作用戶設備(即,蜂窩連接的無人機用戶設備),無人機與地面基站之間需要可靠且低延遲通信。事實上,為了支持無人機大規模部署,需要一種可靠的無線通信基礎設施,有效控制無人機運行,同時支持其應用服務產生的流量。
除了超低延遲和可靠性要求,用于監視目的時,無人機用戶設備將需要來自地面網絡以及其他無人機-基站的高速上行連接。目前的蜂窩網絡可能無法全面支持無人機-用戶設備,無人-用戶設備與地面用戶之間存在關鍵區別,首先,由于地面基站與飛行無人機之間近乎視距通信,無人機用戶設備通常歷經不同的信道狀態。在該案例中,支持無人機用戶設備的主要挑戰之一是地面基站造成的嚴重視距干擾。第二,與地面用戶不同,無人機用戶設備的機載能量非常有限。第三,無人機用戶設備通常比地面用戶動態性更高。因此,把蜂窩連接無人機-用戶設備引入無線網絡將會帶來新的挑戰和設計考量。
1.3 無人機飛行自組網
無人機的關鍵應用案例之一是用于飛行自組網(FANET),在此種網絡中,多架無人機以自組方式通信。利用無人機的移動性、中央控制很少以及自組織等特性,FANET可以在蜂窩基礎設施有限的地理區域擴展連通性和通信距離。與此同時,FANET還可在各種應用(如流量監控、遙感、邊界監視、沙漠管理、農業管理、防火管理以及中繼通信)中扮演重要角色。特別是,無人機中繼網絡可在由于障礙物或相隔距離太遠而無法直接通信的遠程發射機和接收機之間,保持可靠的通信鏈路。
1.4 其他潛在無人機應用案例
(1)無人機用作地面網絡的飛行回程:有線回程是基站連接到地面網絡的核心網的一種常用方法。然而,由于地理限制,特別是在涉及超密集蜂窩網絡時,有線連接可能非常昂貴且不可行。盡管無線回程是一項可行且成本有效的解決方案,但它要遭受堵塞和干擾,從而降低無線接入網的性能。在該案例中,在地面網絡實現成本有效、可靠且高速無線回程連通方面,無人機可以發揮重要作用。特別是,無人機可以優化部署,規避障礙物,建立視距可靠通信鏈路。此外,使用具有毫米波能力的無人機可以建立高數據率無線回程連通,這是應對擁塞區域的高流量需求所需的。無人機還能夠創建一種空中可重構網絡,提供多跳視距無線回程機會。顯然,這種靈活的基于無人機的回程網絡可以明顯改善地面網絡回程的可靠性、能力和運行成本。
(2)智慧城市:無人機可以提供多種智慧城市無線應用案例。一方面,它們可以用作數據采集設備,跨越城市各種地理區域采集大量數據并將這些數據傳送到中心云單元進行大數據分析。另一方面,無人機基站可以用于簡單增強城市的蜂窩網絡覆蓋或對特定的緊急情況做出響應。無人機也可以用來感知整個城市的無線電環境圖,以協助網絡運營商的網絡運行和頻率規劃工作。無人機在智慧城市中另一個關鍵應用是它們能夠充當移動云計算系統。在這方面,安裝在無人機上的小云能夠為那些無法執行繁重計算任務的設備提供霧計算和卸載機會。在智慧城市里,為了特定用途(例如,再沖電),無人機可能需要臨時定位在建筑物上面。在這種情況下,為了協調無人機運行,需要按需對無人機進行位置編號管理。總的來說,從無線和運行角度,無人機將是智慧城市其中不可或缺的一部分。
2、基于無人機的無線組網面臨的挑戰
為了讓讀者清楚了解無人機是如何用作飛行無線基站的,本節將簡要描述無人機無線中心部署的大量預期應用。這些應用來自各種場景,包括近期應用案例(如公共安全場景或熱點覆蓋)以及未來應用(如無人機用作緩存設備或物聯網使能器)。
由于無人機具有機動性、靈活性等獨有特性,將無人機用于無線組網頗具挑戰性。本節重點研究基于無人機的無線組網面臨的主要挑戰。
2.1 空對地信道建模
無線信號傳播受發射機和接收機之間介質的影響。空對地(A2G)信道特性明顯有別于傳統地面通信信道,根據覆蓋和容量可以確定基于無人機的無線通信性能。同時,與具有視距優勢的空對空通信鏈路相比,空對地信道更易受障礙物影響。顯然,基于無人機的通信系統的優化設計和部署需要采用精確的空對地信道模型。盡管射線追蹤技術是一種合理的信道建模方法,但目前還達不到足夠的精度,尤其是在低頻工作時。在無人機應用于覆蓋增強、蜂窩連接無人機用戶設備和物聯網通信時,精確的空對地信道建模尤為重要。
空對地信道特性明顯有別于地面通信信道。特別是無人機的任何移動或振動都可能影響信道特性。此外,空對地信道高度依賴無人機的高度和類型、仰角以及傳播環境類型。因此,需要在各種環境下的綜合仿真和測量,才能找到一種無人機對地通信的通用信道模型。在信道建模中,必須獲得無人機高度、天線運動以及由無人機機身遮擋造成的影響。顯然,捕獲這些因素是空對地信道建模所面臨的挑戰。
2.2 最佳部署
無人機的三維部署是基于無人機的通信所面臨的關鍵挑戰之一。無人機可調的飛行高度和潛在的機動性為其有效部署提供了額外自由度。因而,無人機的最佳部署受到極大關注。事實上,在使用無人機用于實現最大覆蓋和容量、公共安全、智慧城市、緩存和物聯網應用時,部署成為關鍵的設計考量。最佳三維無人機布置是一項很有挑戰性的任務,因為它取決于許多因素,例如部署環境(如地理區域)、地面用戶位置、無人機對地信道特性(這是無人機高度的函數)。此外,由于蜂窩間干擾對系統性能的影響,同時部署多架無人機頗具挑戰性。事實上,按照傳統蜂窩網絡規劃部署無人機比部署地面基站更具挑戰性。與地面基站不同,由于考慮到高度對空對地信道特性的影響,無人機需要部署在一個連續三維空間。此外,在部署無人機時,它們的飛行時間和能量限制也必須予以考慮,因為它們直接影響網絡性能。
2.3 軌跡優化
在基于無人機的通信系統中,無人機的最佳路徑規劃是另一項重要挑戰。特別是,在無人機應用于智慧城市、無人機用戶設備和緩存場景過程中,無人機軌跡優化非常重要。無人機軌跡易受不同因素的影響,比如飛行時間、能量限制、地面用戶需求和碰撞規避。
當然,無人機飛行路徑的優化面臨挑戰,因為需要考慮許多物理約束和參數。例如,為實現無人機性能優化而探索無人機軌跡時,需要考慮多種關鍵因素,如由機動性引起的信道變化、無人機動態、無人機能耗以及飛行限制。另外,解決無人機連續軌跡優化問題面臨分析性挑戰,因為需要找到無數個優化變量(即無人機的位置)。此外,在無人機實現的無線網絡中,軌跡優化需要捕獲無線通信中機動性與各種QoS指標之間的關聯。
2.4 性能分析
在設計基于無人機的通信系統時,為了評估設計參數對系統整體性能的影響,需要進行基本性能分析。當然,由于無人機的高度和潛在機動性以及信道特性不同,對基于無人機的無線系統進行基本性能分析與傳統地面網絡有很大不同。同時,無人機嚴格的能量限制還帶來一些獨特挑戰。無人機機載能量有限導致飛行時間短,這是影響基于無人機的無線通信性能的一個主要因素。實際上,對由飛行和地面基站組成的復雜異構空中-地面無線網絡進行性能分析是一項頗具挑戰性的任務。事實上,需要對基于無人機實現的無線網絡進行全面性能分析,同時記錄無人機各方面的特性,包括機動性以及與地面網絡共存的特定空對地信道特性。此外,由于網絡的移動和高動態特性,具有飛行用戶和基站的蜂窩連接無人機網絡有其特有的復雜性。
2.5 網絡規劃
網絡規劃要解決大量關鍵問題,如基站定位、流量估計、頻率分配、小區關聯、回程管理、信令和干擾抑制。當無人機用于實現覆蓋和容量增強時,基于無人機的無線網絡的規劃尤為重要。由于無人機獨有的特性(移動性、視距干擾、能量限制和無線回程連通性),在無人機輔助蜂窩網絡中,網絡規劃頗具挑戰性。對于存在飛行無人機-用戶設備的網絡,需要新的考量。一方面,上行中大量潛在無人機-用戶設備帶來的視距干擾會對網絡規劃造成明顯影響。另一方面,地面基站必須裝備適合類型的天線,以便為下行無人機-用戶設備提供服務。傳統蜂窩網絡的網絡規劃與無人機系統之間的另外一點不同是信令和開銷數量不同。在使用無人機的蜂窩網絡的規劃中,必須對信令和開銷方面的問題予以考量。
飛行無人機的回程連接是無人機通信系統設計中的另一項關鍵挑戰。由于無人機基站處于空中,需要利用無線回程把它們連接到一個核心網。WiFi和衛星技術是頗具前途的無線回程解決方案。相比WiFi,衛星鏈路可以提供更廣的回程覆蓋。但是,相比衛星回程,WiFi鏈路有成本和時延優勢。其他頗具前途的無線回程解決方案是設有地面站的毫米波和自由空間光通信(FSO)。
2.6 資源管理和能量效率
當無人機在物聯網、公共安全和無人機輔助蜂窩無線網絡等重要場景中運行時,要重點關注資源管理和能量效率。資源管理是蜂窩網絡面臨的主要挑戰,同時,無人機也帶來了其獨有的挑戰,因為:1)無人機飛行時間、能量、路徑規劃和頻譜效率之間的相互影響;2)無人機嚴格的能量和飛行限制;3)來自空對地和空對空鏈路的視距干擾;4)無人機特有的機動性。因此,有必要對運行于異質譜帶且與地面網絡共存的復雜無人機輔助無線網絡的資源分配進行優化和管理。事實上,資源管理和頻譜共享過程必須恰當地處理無線網絡的固有動態,例如無人機的時變干擾、流量模式變化、機動性和能量限制。
當然,飛行無人機用于傳輸、機動、控制、數據處理和有效載荷用途的能量有限。因此,無人機的飛行時間通常很短而且不足以提供長期連續無線網絡覆蓋。無人機的能耗也取決于無人機的角色/任務、天氣情況及導航路徑。這種能量限制又會限制無人機的飛行和懸停時間。因而在設計無人機通信系統時,需要明確考慮無人機的能量和飛行限制。因此,對無人機的能量效率需要仔細考量,因為它對無人機通信系統有重大影響。事實上,無人機自身能量有限對于無人機在各種應用中的部署和機動有非常大的限制。
2.7 無人機-用戶設備
無人機除了可以用作空中基站,也可以作為飛行用戶成為蜂窩網絡的一部分。無人機-用戶設備,由于其相對高的高度、嚴格的機載能量限制、動態作用、潛在的大量部署以及其近乎毫無限制的機動性,將進一步加劇諸如性能分析、干擾管理、機動性管理以及能量和頻譜效率等方面的傳統無線挑戰。特別是由于無人機-用戶設備的大量部署、為實現基站到無人機通信而地對空信道建模、設計可支持高高度(即高仰角)無人機的適合基站天線,在蜂窩網絡中使用無人機-用戶設備引入了獨特的挑戰,例如上行干擾管理。另外,無人機-用戶設備要求超可靠低延遲通信(URLLC),旨在迅速控制其運行,保證其安全有效導航。顯然,需要URLLC還會導致新型無線組網挑戰。
此外,部署飛行無人機-用戶設備和無人機-基站空中網絡,還需要有效的越區切換管理機制。越區切換是無線網絡的一個關鍵過程,在這個過程中,用戶關聯發生改變,目的是維護移動用戶的連通。同時,越區切換管理將造成無線網絡中的信令開銷。這種越區切換信令取決于網絡的規模、機動性(用戶和基站移動)、用戶和基站位置以及越區切換速率。在基于無人機的通信系統中,需要進行越區切換管理,以減少越區切換信令,同時為超可視視距(BVLOS)場景中的飛行無人機提供連通。在無人機通信中,由于無人機用戶設備和無人機基站的高度動態特性,相比傳統蜂窩網絡,越區切換管理有非常大的挑戰性。有效的越區切換機制必須適應無人機-用戶設備和無人機-基站的3D移動,同時在為無人機-用戶設備提供服務時,保證低延遲通信和控制。
此外,對于無人機-用戶設備,所有上述的挑戰還必須考慮到這樣的事實:為了實現用戶覆蓋最大化,地面基站的天線將下傾。因此,了解天線傾斜對無人機-用戶設備的影響,這是非常必要的,同時還需要研究如何通過自適應波束形成或地面基站的新型無人機-用戶設備感知設計克服這種限制。
3、基于無人機的無線通信及網絡面臨的開放性問題
在前一節中,概述了基于無人機的無線通信的總體研究方向和面臨的挑戰。以下章節則討論每個涵蓋領域面臨的開放性研究問題,詳細描述未來機遇。盡管對于無人機通信進行了大量研究,但仍然存在許多關鍵開放性問題,必須加以研究。
3.1 信道建模
對于空對地信道建模,存在幾個關鍵開放性問題。第一點,也是最重要的一點,需要更多來自真實測量的真實信道模型。雖然在這方面的工作已經開始,但大部分工作仍然局限于單架無人機或非常特殊的環境。信道測量需要能夠跨城區和鄉村地區,同時,也有必要進行各種工作環境(例如氣候條件)下更廣泛的信道測量。此外,仿真結果也可以擴展到對小尺度衰落模型空對地通信進行建模。此外,隨著無人機越來越多地用作飛行基站、無人機用戶設備甚至是用于回程支持,人們必須對空對空信道建模有更多的洞察。具體來說,由于無人機的機動性,需要能夠捕獲信道時變和多普勒效應的精確無人機到無人機信道模型。此外,在考慮無人機飛行高度以及天線運動的同時,需要描述空對空通信中的多徑衰落特性。
3.2 部署
要解決無人機部署方面的開放性問題,由于無人機的獨特特性,需要新的無人機優化3D布局解決方案。例如,關鍵的開放問題之一是在地面網絡場景下優化無人機3D布局。例如,需要研究無人機如何在與蜂窩網絡共存的情況下進行部署,同時考慮空中系統與地面系統之間的相互干擾。部署過程中,其他關鍵開放性問題包括:
(1)部署和帶寬分配的聯合優化,實現低延遲通信:為了降低由無人機基站提供服務用戶的最大傳輸延遲,所面對的一個問題是對無人機基站的3D位置和帶寬分配的聯合優化。特別是在無人機基站數量、用戶位置和可用于服務用戶的帶寬總量一定的情況下,一個重要的開放性問題是找到每個無人機基站的最優位置及其傳輸帶寬,盡量降低用戶的最大下行傳輸延遲。
(2)3D布局和小區關聯的聯合優化,實現飛行時間最小化:為用戶提供無線服務的無人機基站的飛行時間取決于多個因素,如連接到無人機基站的用戶載荷和數量以及下行傳輸速率。在這個問題中,在無人機-基站數量一定的情況下,通過聯合優化無人機-基站位置和用戶-無人機關聯,應該能夠使無人機-基站為用戶提供全面服務所需的總飛行時間最短。
(3)無人機的障礙物感知部署,實現無線覆蓋的最大化:服務于地面用戶的無人機基站的覆蓋性能受障礙物的影響。在這一點上,一個關鍵的開放性問題是基于用戶和障礙物位置,對無人機基站進行優化布局,從而最大化無人機基站總覆蓋。具體來說,在地面用戶和環境中障礙物位置一定的情況下,能夠確定無人機-基站的3D位置,以便無人機覆蓋最大數量的用戶。對于運行于高頻段(例如,毫米波頻率)的無人機,這種方法尤為有用。
3.3 軌跡優化
盡管無人機潛在的機動性能夠為其應用帶來機遇,但也帶來了新的挑戰和技術問題。在無人機輔助的無線網絡中,需要針對關鍵性能指標對無人機軌跡進行優化,如吞吐量、能量和頻譜效率以及時延。此外,軌跡優化問題必須考慮無人機的動態和類型。盡管對無人機軌跡優化進行了大量研究,但仍然存在大量頗具吸引力的開放性問題,包括:1)基于地面用戶移動性模式的無人機軌跡優化,提升覆蓋性能;2)無人機障礙物感知軌跡優化考慮用戶時延限制和無人機能耗;3)通過軌跡優化提升基于無人機無線網絡的可靠性并降低延遲;4)無人機的聯合控制、通信和軌跡優化,縮短無人機飛行時間。
3.4 性能分析
對于性能分析,有很多問題仍待研究。例如,必須完全描述由空中和地面用戶和基站組成的基于無人機無線網絡的性能,即覆蓋和容量。特別是需要一種異構空-地網絡中的覆蓋概率和頻譜效率的易處理表達式。此外,需要通過基本性能分析,捕獲無人機網絡中頻譜效率和能量效率之間的固有權衡。另一個開放性問題是將無人機機動性加入對基于無人機的無線網絡的性能評估中。對這種移動無線網絡的基本分析涉及捕獲網絡中各種性能指標的空間和時間變量。例如,需要對無人機軌跡對其通信性能的影響進行研究,包括吞吐量、延遲和能效。
3.5 網絡規劃
使用無人機進行有效網絡規劃需要解決大量關鍵問題。例如,如何用最少量無人機提供對地面基站只能部分覆蓋的指定地理區域的全覆蓋。當這一感興趣地理區域的幾何形狀(例如圓盤或方形)不規則時,解決上述問題還要面臨特殊挑戰。另一個設計問題是使用無人機作為空中基站時,無人機回程感知調度。在這一案例中,當部署無人機基站時,必須考慮無人機回程連通性及其用戶的服務質量。其他重要的開放性問題包括:1)在地面和空中基站與用戶共存時進行有效的頻率規劃;2)開發新方法,使飛行中的無人機無論何時入網都能動態實現;3)設計能夠應對高移動性無人機用戶設備的魯棒自適應網絡規劃技術。最后一點,必須對無人機基站和無人機用戶設備相關信令開銷進行分析,同時描述開銷對性能的影響。
3.6 資源管理和能量效率
資源管理是基于無人機的通信系統中另一重要研究問題。特別是需要一種能夠動態管理各種資源的框架,包括帶寬、能量、發射功率、無人機飛行時間、無人機數量等。例如,如何動態調整服務于地面用戶的飛行無人機的發射功率和軌跡。同時,需要設計有效的調度技術,抑制無人機輔助的蜂窩網絡中空中和地面基站間的干擾。另外,必須對飛行和地面基站異構網絡中動態頻譜共享進行分析。最后,采用適合無人機運行的頻段(例如,WiFi、LTE頻段)是重要的設計問題。
3.7 無人機-用戶設備
當然,在蜂窩中充當用戶的飛行無人機會引入新的設計挑戰。特別是在無線網絡中使用無人機用戶設備時,必須考慮無人機的機動性、視距干擾、越區切換、能量限制以及低延遲控制。在這點上,無人機用戶設備通信中的關鍵開放性問題包括:1)開發用于大規模無人機用戶設備部署場景的魯棒干擾抑制技術;2)設計動態越區切換機制,管理無人機高機動性帶來的頻繁越區切換問題;3)為基站到無人機通信提供精確的地對空信道模型;4)提出新的調度方案,同時考慮無人機電池的限制;5)設計有效的解決方案,滿足無人機用戶設備的URLLC需求;6)分析特定應用的QoS措施。
4、實現基于無人機通信的分析框架
實現基于無人機通信的分析框架這一領域是高度跨學科的,它將需要利用傳統領域工具,如通信理論、優化理論和網絡設計以及新興領域,如隨機幾何、機器學習和博弈論,如圖4所示。
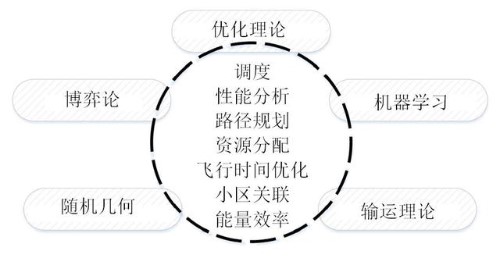
圖4設計無人機通信系統的數學工具
4.1 集中優化理論
在無人機作為飛行基站進行部署的第一階段,盡管無人機具有固有自主能力,人們仍然設想最初無人機仍將依賴中央控制。這對于蜂窩網絡容量增強這類應用非常重要,在這些應用中,在像無人機這樣的技術早期試驗過程中,蜂窩操作人員可能不愿意放棄對網絡的控制權。在此類場景中,許多確定的研究問題將自然涉及表述和解決頗具挑戰性的集中優化問題。此類問題可能在云端(例如在云輔助無線電接入網絡),也可能在地面基站級(能夠控制一些無人機)。
值得注意的是,傳統地面蜂窩網絡優化問題的解決方案可以用于無人機通信。例如,連續凸優化等經典方法可以用于優化無人機的三維位置和軌跡。然而,這里確定的許多問題都需要更先進的優化技術。例如,在分析用戶關聯問題時,自然會歸結到具有挑戰性的混合整數規劃問題,這類問題無法使用傳統算法(例如那些用于凸優化的算法)解決。先進的數學工具(最優輸運理論)可為大量小區關聯問題提供易處理的解決方案,實現無人機飛行時間和基于無人機的無線網絡吞吐量和能量效率的優化。
4.2 最優輸運理論
對于伴隨基于無人機的無線網絡中用戶關聯、資源分配和飛行時間優化等問題而出現的非常艱難的優化問題,利用最優輸運理論可以得出易處理的解決方案。利用概率論和統計學領域的新思想,利用最優輸運理論能夠獲得無線設備的總分布,能夠比現有啟發式研究能更深入地對網絡性能優化展開基本分析。最優輸運屬于數學領域,研究物品在不同位置之間的輸運場景。
在最優輸運理論框架內,可以解決用戶任一通用空間分布的小區關聯問題。事實上,針對基于無人機的無線網絡中用戶關聯資源分配、能量管理和飛行優化問題的多樣化,可利用最優輸運理論推導出易處理的解決方案。具體而言,給定地面用戶的任一空間分布,可以利用最優輸運理論推導出最優小區關聯和資源管理方案,從而實現最佳系統性能,包括能量效率、吞吐量以及在無人機確定性飛行時間約束下的時延。
4.3 使用隨機幾何的性能分析
隨機幾何技術是作為自組網和蜂窩網絡強大的性能分析工具而興起的。其主要原理是賦予定位設備(例如用戶和基站)一個點過程,然后對關鍵性能指標進行評估,例如覆蓋、速率、吞吐量或時延。盡管該技術已用于2D異構蜂窩網絡分析,但它也可能可用于描述3D無人機網絡性能。然而,必須使用現實的點過程,對無人機位置進行建模。例如,當無人機部署在用戶熱點時,二項-泊松聚類過程更適合,目標是服務于特定區域的大量用戶。
4.4 機器學習
機器學習使系統能夠通過對其環境和過去的經驗進行自動學習,從而提高其性能。機器學習可潛在用于實現基于無人機的無線通信系統的設計和優化。例如,使用強化學習算法,無人機可以動態調整自己的位置、飛行方向和運動控制,為地面用戶提供服務。在這種情況下,無人機能夠以一種自組織方式快速適應動態環境,并自動優化其軌跡。此外,可利用神經網絡技術并進行數據分析,預測地面用戶行為并有效部署和操控無人機。例如,利用機器學習工具能夠預測用戶移動性及其載荷分布,可用于進行無人機優化部署和路徑規劃。有關用戶的機動性模式和流量分布的信息對于設計用于緩存的無人機系統特別有用。機器學習還可用于學習無線電環境圖以及使用無人機建立3D信道模型。這些無線電環境圖可隨后用于無人機通信系統的優化部署和操作。
4.5 博弈論
分布式決策將是無人機網絡一個不可或缺的組成部分。因此,隨著機器學習的使用,博弈論將為基于無人機的無線網絡中分布式決策提供重要基礎。博弈論是一種自然用于分析資源管理和軌跡優化問題的工具,其中決策在每架無人機級制定。在這樣的情況下,每架無人機將具有捕獲其服務質量的獨立目標函數。在無人機實現的網絡中,分布式資源管理問題將涉及不同類型的參與者(無人機、基站、用戶設備)以及多維策略空間,包括能量、頻譜、懸停/飛行時間和3D位置。由此將激發先進博弈論機制的使用,如新興的多博弈概念,在一個無人機網絡中,可能多種博弈共存,如無人機之間的博弈和地面基站之間的博弈,同樣,需要對這樣的多博弈場景進行分析。
5、結語
本文對無人機在無線網絡中的應用進行了綜合研究。研究了無人機的兩種主要應用案例,即空中基站和蜂窩連接的用戶,即無人機用戶設備。對于每種無人機應用案例,探討了主要挑戰應用和根本開放性問題。此外,提供了基于無人機的無線網絡所面臨挑戰。同時,描述了滿足無人機挑戰以及分析無人機實現的無線網絡所需的數學工具和技術。對無人機通信和組網的深入研究將為基于無人機的無線通信系統的優化、設計和運行提供參考。
責任編輯:gt
-
無線通信
+關注
關注
58文章
4711瀏覽量
144858 -
無人機
+關注
關注
230文章
10738瀏覽量
185573 -
機器學習
+關注
關注
66文章
8492瀏覽量
134106
發布評論請先 登錄
無人機無線通信技術解決方案





 工商網監
工商網監
評論