") dfrobot機(jī)器人評(píng)估開發(fā)平臺(tái)簡(jiǎn)介
dfrobot機(jī)器人評(píng)估開發(fā)平臺(tái)簡(jiǎn)介





簡(jiǎn)介
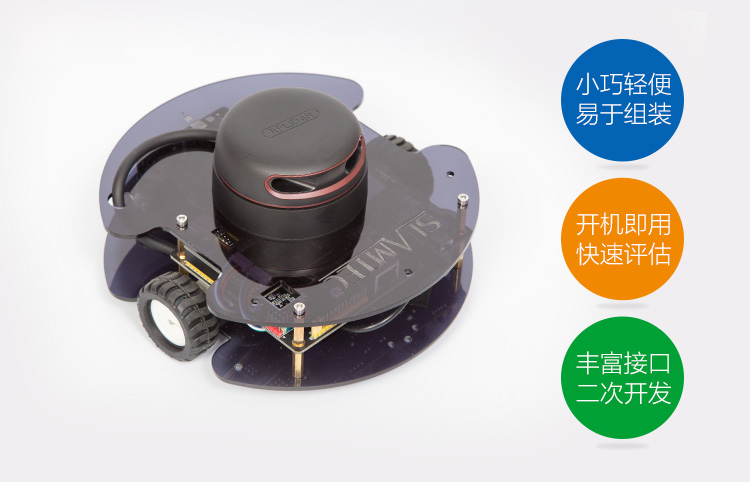
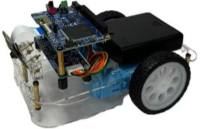
SDP Mini 是一款迷你型機(jī)器人評(píng)估開發(fā)平臺(tái),內(nèi)置激光雷達(dá) RPLIDAR A2、自主定位導(dǎo)航模塊SLAMWARE和量程計(jì)。
無需額外進(jìn)行硬件集成即可實(shí)現(xiàn)自主建圖和自動(dòng)導(dǎo)航。可以依靠8節(jié)5號(hào)電池或者鋰電池驅(qū)動(dòng),小巧輕便,簡(jiǎn)單易用。

SDP Mini結(jié)構(gòu)簡(jiǎn)單,組裝完畢即可使用,可快速評(píng)估基于SLAMWARE的室內(nèi)定位導(dǎo)航解決方案。
同時(shí),采用開放的軟硬件接口,支持Windows/Linux/Arduino/iOS開發(fā)環(huán)境,提供全套開發(fā)文檔。













聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
Linux
+關(guān)注
關(guān)注
87文章
11465瀏覽量
212817 -
WINDOWS
+關(guān)注
關(guān)注
4文章
3608瀏覽量
90965 -
嵌入式主板
+關(guān)注
關(guān)注
7文章
6097瀏覽量
36141 -
DFRobot
+關(guān)注
關(guān)注
4文章
1160瀏覽量
10554
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
熱點(diǎn)推薦
明遠(yuǎn)智睿SSD2351開發(fā)板:語音機(jī)器人領(lǐng)域的變革力量
在人工智能快速發(fā)展的今天,語音機(jī)器人逐漸成為人們生活和工作中的得力助手。明遠(yuǎn)智睿SSD2351開發(fā)板憑借強(qiáng)大性能與豐富功能,為語音機(jī)器人的發(fā)展注入新動(dòng)力,成為該領(lǐng)域的變革力量。 SSD2351
發(fā)表于 05-28 11:36
盤點(diǎn)#機(jī)器人開發(fā)平臺(tái)
Athena機(jī)器人****開發(fā)平臺(tái)思嵐推出Athena機(jī)器人開發(fā)平臺(tái),有望主導(dǎo)
發(fā)表于 05-13 15:02
【「# ROS 2智能機(jī)器人開發(fā)實(shí)踐」閱讀體驗(yàn)】機(jī)器人入門的引路書
ROS的全稱:Robot Operating System 機(jī)器人操作系統(tǒng)
ROS的 目的 :ROS支持通用庫,是通信總線,協(xié)調(diào)多個(gè)傳感器
為了解決機(jī)器人里各廠商模塊不通用的問題,讓機(jī)器人快速
發(fā)表于 04-30 01:05
【「# ROS 2智能機(jī)器人開發(fā)實(shí)踐」閱讀體驗(yàn)】+內(nèi)容初識(shí)
《ROS 2智能機(jī)器人開發(fā)實(shí)踐》內(nèi)容閱讀初體驗(yàn)
《ROS 2 智能機(jī)器人開發(fā)實(shí)踐》是一本針對(duì) ROS 2(Robot Operating System 2)這一先進(jìn)
發(fā)表于 04-27 11:24
大象機(jī)器人攜手進(jìn)迭時(shí)空推出 RISC-V 全棧開源六軸機(jī)械臂產(chǎn)品
全球80多個(gè)國家和地區(qū)。
近日,大象機(jī)器人聯(lián)合進(jìn)迭時(shí)空推出全球首款RISC-V全棧開源六軸機(jī)器臂“myCobot 280 RISC-V”,為開發(fā)者打造全新的機(jī)器人開源創(chuàng)新
發(fā)表于 04-25 17:59
機(jī)器人開發(fā)套件 Kria KR260
AMD/XilinxKria KR260機(jī)器人入門套件是一款基于Kria K26 SOM的開發(fā)平臺(tái),設(shè)計(jì)用于機(jī)器人和工業(yè)應(yīng)用。它具有高性能接口和原生ROS2支持,便于
NVIDIA Isaac 是英偉達(dá)推出的綜合性機(jī)器人開發(fā)平臺(tái)
NVIDIA Isaac 是英偉達(dá)推出的綜合性機(jī)器人開發(fā)平臺(tái),旨在通過 GPU 加速、物理仿真和生成式 AI 技術(shù),加速自主移動(dòng)機(jī)器人(AMR)、機(jī)械臂及人形
名單公布!【書籍評(píng)測(cè)活動(dòng)NO.58】ROS 2智能機(jī)器人開發(fā)實(shí)踐
手機(jī)為平臺(tái)的移動(dòng)互聯(lián)網(wǎng)時(shí)代,下一個(gè)以機(jī)器人為核心的智能機(jī)器人時(shí)代,是否也會(huì)遵循這樣的邏輯?
隨著ROS 2的誕生,智能機(jī)器人開發(fā)迎來新篇章
發(fā)表于 03-03 14:18
ST NPI 專區(qū) | 新開發(fā)套件 【STEVAL-ROBKIT1】 機(jī)器人應(yīng)用評(píng)估平臺(tái)
STEVAL-ROBKIT1是一個(gè)用于機(jī)器人技術(shù)和應(yīng)用開發(fā)的綜合機(jī)器人評(píng)估平臺(tái)。該套件的模組化設(shè)計(jì)包括主機(jī)板、電機(jī)控制板和成像板。主機(jī)板由S
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人的基礎(chǔ)模塊
具身智能機(jī)器人的基礎(chǔ)模塊,這個(gè)是本書的第二部分內(nèi)容,主要分為四個(gè)部分:機(jī)器人計(jì)算系統(tǒng),自主機(jī)器人的感知系統(tǒng),自主機(jī)器人的定位系統(tǒng),自主機(jī)器人
發(fā)表于 01-04 19:22
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人大模型
引入GPT這樣的大模型后,情況發(fā)生了根本性的變化。只需提供適當(dāng)?shù)奶崾驹~以及封裝好的機(jī)器人函數(shù)庫,大模型便能靈活地生成控制代碼,極大地簡(jiǎn)化了開發(fā)過程,并提高了自動(dòng)化水平。
此外,大模型憑借強(qiáng)大的推理能力
發(fā)表于 12-29 23:04
鴻蒙機(jī)器人與鴻蒙開發(fā)板聯(lián)動(dòng)演示
鴻蒙機(jī)器人與鴻蒙開發(fā)板聯(lián)動(dòng)演示,機(jī)器人的角色為迎賓機(jī)器人,開發(fā)板負(fù)責(zé)人賓客出現(xiàn)監(jiān)聽
發(fā)表于 12-02 14:55
ROS讓機(jī)器人開發(fā)更便捷,基于RK3568J+Debian系統(tǒng)發(fā)布!
。
ROS系統(tǒng)主要特點(diǎn)有哪些
(1) 提供豐富的機(jī)器人算法庫
機(jī)器人的各種控制以及通信離不開算法庫的支持,ROS系統(tǒng)提供豐富且功能強(qiáng)大的機(jī)器人算法庫,如坐標(biāo)變換、運(yùn)動(dòng)控制等。機(jī)器人
發(fā)表于 07-09 11:38
Al大模型機(jī)器人
金航標(biāo)kinghelm薩科微slkor總經(jīng)理宋仕強(qiáng)介紹說,薩科微Al大模型機(jī)器人有哪些的優(yōu)勢(shì)?薩科微AI大模型機(jī)器人由清華大學(xué)畢業(yè)的天才少年N博士和王博士團(tuán)隊(duì)開發(fā),與同行相比具有許多優(yōu)勢(shì):語言
發(fā)表于 07-05 08:52
abb工業(yè)機(jī)器人的編程語言是什么
編程而設(shè)計(jì)。RAPID語言具有易學(xué)易用、功能強(qiáng)大、靈活性高等特點(diǎn),廣泛應(yīng)用于ABB工業(yè)機(jī)器人的編程和應(yīng)用開發(fā)。 ABB工業(yè)機(jī)器人編程語言RAPID概述 RAPID語言簡(jiǎn)介 RAPID是





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論