 如何制作Wi-Fi控制的四輪機器人
如何制作Wi-Fi控制的四輪機器人

步驟1:組件列表

Wemos D1 Mini [數量– 1]
L293d電機驅動器IC [數量– 2]
PCF8574端口擴展器IC [數量– 1]
12V鋰離子電池[數量– 1]
4WD機器人智能汽車底盤套件[數量– 1]
步驟2:項目的大腦-ESP8266開發板(Wemos D1 Mini)

Wemos D1 Mini 是基于ESP-8266芯片的具有4MB閃存的微型Wi-Fi開發板。
具有11個數字輸入/輸出引腳,所有引腳均支持中斷/pwm/I2C/單線(D0除外)
具有1個模擬輸入(最大3.2V輸入)
該板基于ESP8266,因此與Arduino IDE兼容,因此可以使用Arduino進行編程,也可以使用Lua編譯器進行編程。它還支持串行和OTA編程。
我們將使用Arduino IDE對Wemos D1 Mini進行編程。要使用Arduino IDE對該板進行編程,需要滿足以下要求。
要求:-
CH340G驅動程序
從以下位置安裝最新的Arduino IDE: Arduino網站。
用于編程的微型USB電纜
在安裝驅動程序和arduino軟件之后,您需要在Arduino IDE內安裝“ ESP8266 WiFi芯片的Arduino核心”,以便我們可以在Arduino環境中對ESP8266芯片進行編程。此ESP8266 Arduino核心可讓您使用熟悉的Arduino函數和庫編寫草圖,并直接在ESP8266上運行它們,而無需外部微控制器。
ESP8266 Arduino核心隨附的庫可使用TCP和UDP通過WiFi進行通信, HTTP,mDNS,SSDP和DNS服務器,進行OTA更新,在閃存中使用文件系統,與SD卡,伺服器,SPI和I2C外設配合使用。
下載以下文檔以獲取幫助關于如何安裝Esp8266 arduino內核。


電動機驅動器是一種用于電動機的IC,可讓您同時控制兩個電動機的工作速度和方向。
L293d設計用于可以在5 V至36 V的電壓范圍內提供雙向驅動電流。L293D可以同時驅動2個直流電動機。
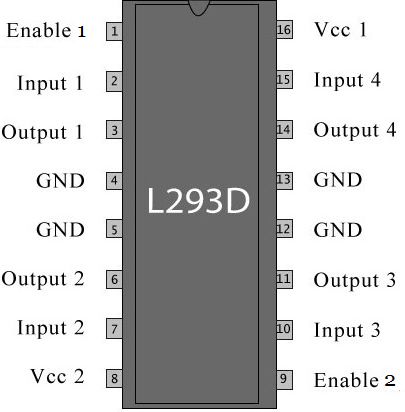
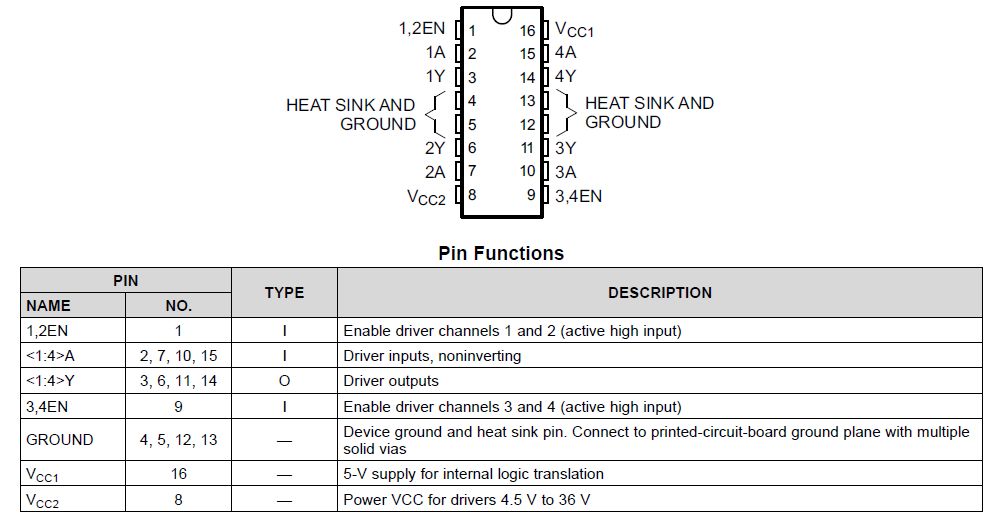
L293D是16引腳電動機驅動器IC。每個電機有4個INPUT引腳,4個OUTPUT引腳和2個ENABLE引腳。
L293D特性:
每通道600mA輸出電流能力
各個通道的時鐘和逆時針方向控制。
L293d的引腳說明:
引腳1:當Enable1為高電平時,IC的左側部分將工作,即,與引腳3和引腳6連接的電動機將旋轉。
引腳2:輸入1,當此引腳為高電平時,電流將流經輸出1。
引腳3:輸出1,該引腳與電動機的一個端子連接。
引腳4/5:GND引腳
引腳6:輸出2,該引腳與電動機的一個端子連接。
引腳7:輸入2,當此引腳為高電平時,電流將流經輸出2。
引腳8:VCC2,該引腳用于為來自所連接電機的電源供電最大5V至36V取決于連接的電動機。
引腳9:當啟用2為高電平時,IC的右側部分將工作,即與引腳11和引腳14連接的電動機將旋轉。
引腳10:輸入4,當此引腳為高電平時,電流將流經輸出4。
引腳11:輸出4,該引腳與電機的一個端子連接。
引腳12/13:GND引腳
引腳14:輸出3,該引腳與電動機的一個端子連接。
引腳15:輸入3,當此引腳為高電平時,電流將流經輸出3。
引腳16:VCC1,用于為IC邏輯供電,即5V。
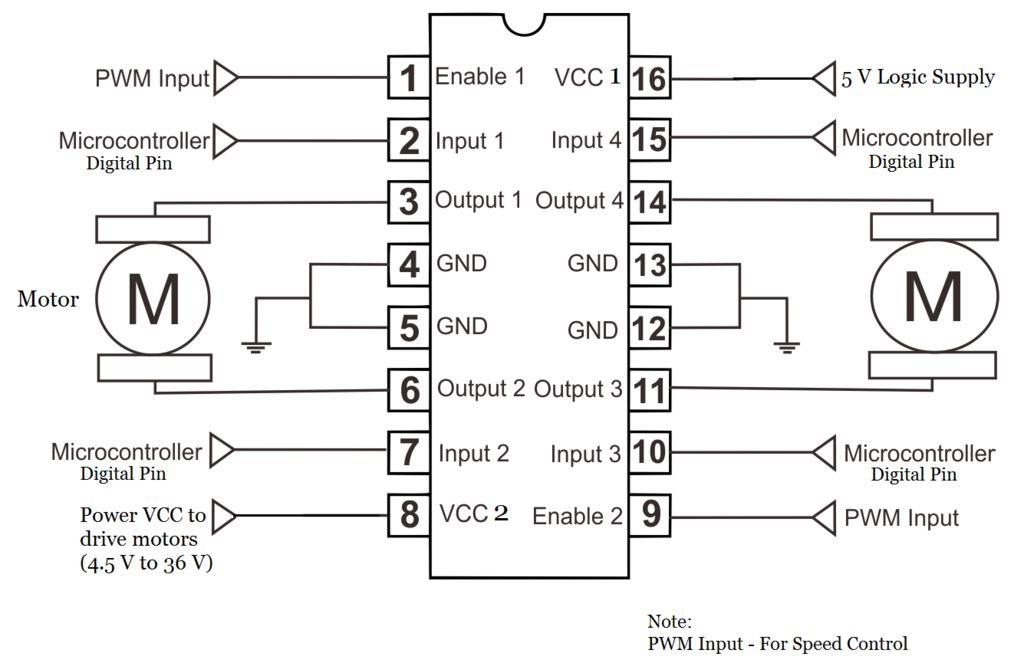
因此,您會看到需要3個數字引腳來控制每個電動機(一個引腳用于速度控制,兩個引腳用于方向控制)。如果一個L293d控制兩個直流電動機,那么我們將需要兩個L293d IC來控制四個直流電動機。我們將在該項目中使用塑料BO電機。因此,您會看到我們需要12個數字引腳來同時通過速度和方向控制來獨立控制所有四個DC電動機。
但是如果您看到Wemos D1 mini只有11個數字I/O引腳和1個模擬I/O引腳銷。為了解決這個問題,我們將四個啟用引腳(第一個L293d的兩個啟用引腳和其他L293d的兩個啟用引腳)直接連接到Wemos Digital引腳,而所有八個輸入引腳(第一個L293d的四個引腳和其他L293d的四個)直接連接到Wemos Digital引腳。
步驟4:PCF8574-一個I/O端口擴展器
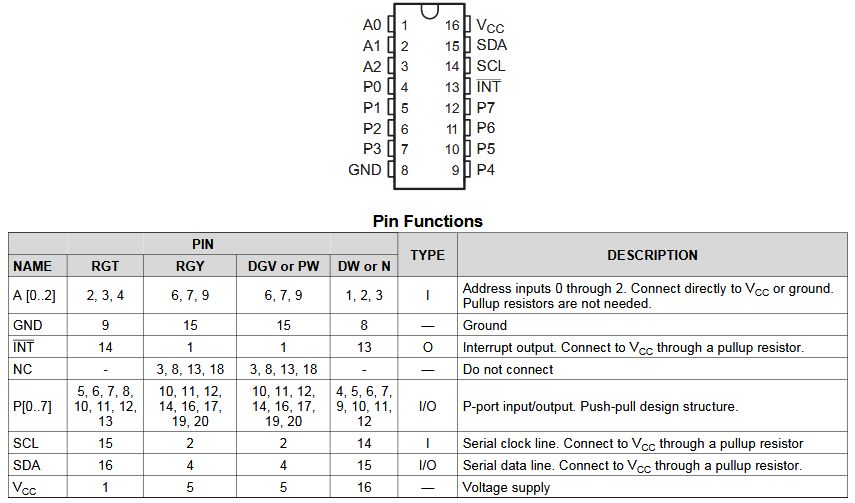
Wemos D1 Mini(例如ESP8266)缺少輸入/輸出引腳。我們可以使用I/O擴展器IC(例如PCF8574,這是一個8位I/O擴展器)來增加數字輸入/輸出引腳。
使用PCF8574A I/O擴展器的優點之一是它使用I2C總線僅需要兩條數據線,它們是時鐘(SCK)和數據(SDA)。因此,使用這兩條線,您可以控制同一芯片的最多八個引腳。通過更改每個PCF8574的三個地址引腳,我們可以控制總共64個引腳。
用于兩線雙向總線(I2C)的8位輸入/輸出(I/O)擴展器設計用于2.5 V至6V VCC操作。 PCF8574器件通過I2C接口[串行時鐘(SCL),串行數據(SDA)]為大多數微控制器系列提供通用的遠程I/O擴展。
該器件具有8位功能準雙向I/O端口(P0–P7),包括具有大電流驅動能力的鎖存輸出,可直接驅動LED。每個準雙向I/O都可以用作輸入或輸出,而無需使用數據方向控制信號。上電時,I/O較高。
有關下面的PCF8574與兩個L293d IC的連接圖,請參見下面的“ PCF8574_With_L293d” pdf文件。
步驟5 :原理圖

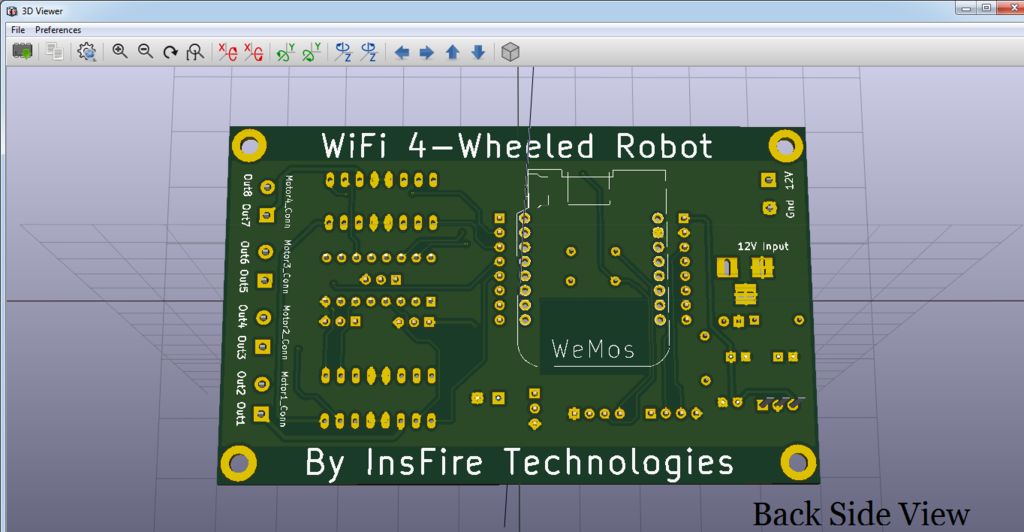
下載以下原理圖pdf來設計自己的PCB或在點PCB板上實現。
步驟6:代碼
連接到以下Wi-Fi接入點:-
//用戶定義的網絡憑據
const char * ssid =“ WiFi_Robot”;
const char * password =“ Automate @ 111”;
連接到上述訪問點后,請在網絡瀏覽器中轉到以下鏈接:-
http ://192.168.4.1
您將收到以下消息:-
“您好,來自機器人!”
http://192.168.4.1/fw
這將導致機器人向前移動
http://192.168.4.1/bk
這將導致機器人向后移動
http://192.168.4.1/lt
這將導致機器人向左移動
http://192.168.4.1/rt
這將導致機器人向右移動
http://192.168.4.1/st
這將導致機器人停止
-
機器人
+關注
關注
213文章
29756瀏覽量
213052 -
wi-fi
+關注
關注
14文章
2259瀏覽量
127077
發布評論請先 登錄
Wi-Fi 8要來了!未來Wi-Fi技術演進方向揭秘

科普|公司的Wi-Fi,為什么這么慢?

Wi-Fi 8:開啟極高可靠性 (UHR) 連接的新紀元——1
華為加速Wi-Fi 7技術在行業場景的應用
Wi-Fi HaLow如何突破傳統Wi-Fi性能瓶頸?

基于 Wi-Fi 的定位服務
nRF Cloud Wi-Fi 定位服務
Wi-Fi 定位服務
Wi-Fi 7 與頻率控制的關系
華為海思正式進入Wi-Fi FEM賽道?
從Wi-Fi 4到Wi-Fi 7:網速飆升40倍的無線革命

Wi-Fi 7與Wi-Fi 6E有什么區別
七騰機器人:防爆輪式機器人-四輪八驅全新上線






 工商網監
工商網監
評論