 四軸飛行器DIY圖解
四軸飛行器DIY圖解

步驟1:
我們使用的ST360 ARF Quadcopter套件購自亞馬遜含稅價約200美元。如果這是您的第一個版本,或者您沒有人指導您完成電子設備和編碼工作,我建議您使用準備飛行(RTF)套件,并且應該使用隨附的飛行控制器。稍后,您將獲得用于無線或自主控制的單獨微控制器,并且如果與您的主板兼容,請使用隨附的無線發射器。另外,我建議您從微型直升機開始。您可以以便宜的價格獲得250套件,它們確實很穩定,并且您可以學習控制直升機的基本知識。在購買更昂貴的道具和馬達之前,您需要進行一些練習。
我們的套件隨附了四個ESC,2個CW道具,2個CCW道具,4個馬達,一個底盤和一個飛行控制器。
我在ESC上找不到任何規格,盡管我們確定它們對大約0.25毫秒至1.5毫秒之間的脈沖寬度做出響應。我將在隨后的步驟中討論PAC及其PWM功能。
CW道具的尺寸標記為8045,而CCW道具的標記尺寸為8045P,其中“ p”表示“推動”道具。許多業余愛好者稱之為CCW道具。
此套件具有8045個道具,即直徑8英寸,節距4.5英寸。基本上,道具的直徑決定了直升機的敏捷性:較長的道具改變速度的速度較慢,但它們的穩定性要高得多。另外,螺距確定螺旋槳旋轉一圈時排出的空氣量。因此,更長的螺距長度將需要更多的電力以給定速度通過電動機運行。
電動機為KT2210,額定電壓為1050kV。本質上,kV額定值是電壓:rpm比率; 1伏特將以1050rpm的速度驅動電動機。由于螺旋槳的尺寸會影響電動機可施加的扭矩,因此必須將電動機與合適尺寸的螺旋槳配對。如果您想選擇自己的電動機/道具設置,這里有一些資源可以幫助您:
我從這里開始:
http://www.tomshardware.com/reviews/multi-rotor-qu。 。.
然后,我通過一堆Google搜索和/r/quadcopter進行了廣泛的掃描。在我對基本物理原理的理解和這些建議的基礎上,我認為大型電動機的額定電壓較低,通常與大型螺旋槳搭配使用,它們可以提升較大的負載,但不能很快改變速度,因此它們并不特別敏捷。較小的電動機與較小的螺旋槳配對使用,盡管它們比較大的裝置敏捷得多,卻無法承受那么大的負載。此外,更大的螺旋槳將需要更大容量的電池。
大多數多旋翼飛機設置中使用的電池是鋰聚合物電池或LiPo電池。電池的容量由電流額定值乘以充電額定值確定。例如,在20C時額定為2200 mAh的電池將具有44000mAh的總容量。 S數是電池中的每個電芯平均保持3.7 V的電芯數量。最常見的是保持11.1V的3S。大多數構建版本將使用2-3S且在1200-2200 mAh之間。
您要研究的一些外圍設備包括IMU(故障測量單元)和無線接收器/收發器。 IMU是通常包括陀螺儀,高度計和指南針的設備。陀螺儀測量旋轉速度,指南針測量方位,高度計測量從給定參考點到多旋翼飛機的高度。對于無線接收器/收發器,或所謂的rx/tx,可以是與控制器配對的任何無線模塊。我們使用了藍牙模塊,該模塊連接到作為控制器的android應用程序。盡管該解決方案的成本很小,但您需要將控制它的應用程序放在一起。 Google Play上有可用的示例,同樣,Reddit是一個不錯的資源,但是您需要確保該應用程序和飛行控制器以相同的格式發送消息。我將在后面的部分中對此進行更詳細的討論。
步驟2:ESC,飛行控制和功率分配
本節將簡要概述如何連接ESC和如何控制ESC。使用單個電動機輸出的四軸飛行器。
使用無刷電機時,首先要注意的是,共有三行,并且它們都是相同的顏色。沒有您的商品沒有缺陷;這是設計使然。 ESC的工作方式與磁懸浮類似。運動是由電磁鐵以高速率打開和關閉而產生的。線路的連接順序將確定電動機是順時針還是逆時針旋轉。并且,您可以通過將任意兩條線切換到ESC來反轉旋轉方向。
當ESC通電時,每個ESC上應有一些LED指示燈以恒定速率閃爍。我不確定閃爍速率的重要性,不同的速率可能表示電池中電池的電量不同,即,當電池電量較低時,LED會更快閃爍;不過,那只是猜測。
通常情況下,ESC設計為將脈沖寬度調制(PWM)信號接收到數據引腳(白色)中。生成該信號可以由飛行控制器處理,并可以通過隨附的軟件進行修改。如果您使用標準的微控制器來控制多旋翼飛機,那么您將在代碼中顯式地控制PWM。這將包括計時器和中斷的使用,我將在審查Hydra-X PAC 5210時進行討論。
我購買的電池確實很漂亮:
http://amzn。 to/1FGu9qa
這是兩包,我在銷售時就買到了。他認為減少兩次航班之間的停機時間將是一件好事。整潔的是Venom電池隨附的通用插頭系統。大多數電池需要4mm的子彈頭連接器或類似的東西,但是“通用插頭系統”使Venom電池可以適應幾種不同類型的插頭。話雖如此,大多數ESC設計用于子彈連接器。如果您要獲得套件,則將處理所有這些細節,但是如果您想組裝一架多軸直升機,則需要做一些額外的研究,并確保您有足夠的電池和可連接的電調它沒有太多麻煩。對于大多數人來說,您只需要一些基本的焊接技巧,盡管您將要確保無需使用過多的焊料就能獲得牢固的連接。
如果您使用的是預先構建的飛行控制器,偏航/俯仰/等應該已經在控制器中進行了編碼。如果您決定設計自己的飛行控制器,則上面的最后一張圖片描述了將在每個軸上產生運動的四個電動機之間的速度差。
如果電動機1是北方,電動機2是東方,電動機3是南,電動機4是西,則:
向前傾斜是俯仰=電動機3-電動機1;例如,對于增加的螺距,電動機3》電動機1
逆時針旋轉是Yaw =(電動機2 +電動機4)-(電動機3 +電動機1);例如,電動機2,電動機4》電動機1,電動機3
順時針旋轉為Roll =電動機4-電動機2;
您需要確定導致電機速度發生明顯變化。對于我的設置,將脈沖寬度更改為0.2毫秒是最小的明顯更改。
步驟3:Hydra X PAC5210
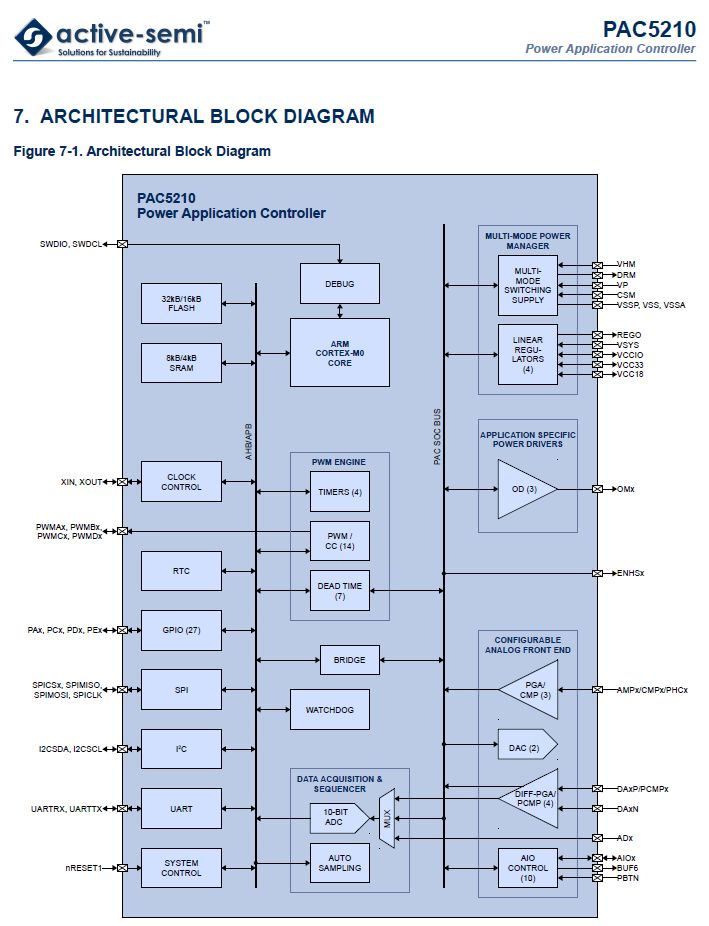
本節將簡要概述PAC以及定時器和中斷的使用。
在這里我想重申一下,我在嵌入式系統上的所有經驗都是在Arduino micro上進行的,因此我告誡讀者注意,我的觀點不是行業專家甚至是經驗豐富的開發人員。話雖如此,我是一個業余修修補補者,對馬克斯·羅伊克羅夫特(Max Roycroft)和何塞·奎諾斯(JoseQuino?es)所做的寶貴努力表示感謝,他們在協助自己和我的團隊以及與德克薩斯大學達拉斯分校合作舉辦HydraX競賽方面做出了寶貴的努力。希望這場比賽將成為更多活動的基礎,使更多的活動參與其中,并使學生和行業專業人士見面并交流。
Hydra-X10是配備PAC5210微控制器的開發平臺。 PAC5xxx系列設備就是我們所謂的Power Application微控制器。與所有其他微控制器相比,Active-Semi的這一系列控制器旨在在高達52V的輸入上運行。這意味著,用戶可以驅動將近52V的設備負載。它具有37個通用I/O引腳,其中包括14個啟用PWM的引腳和11個具有模數轉換的模擬引腳,其中兩個具有數模轉換功能以及一些我不熟悉的功能。
不過,評估設置確實有一些怪癖。 HydraX10平臺設計為默認在至少16V的電壓下運行,這是因為其電路允許最大52V的電壓。用戶手冊中提供了“低壓”模式并進行了描述,但是該模式仍然需要12V的電壓才能運行,這意味著您將需要一個外部電源才能開始對其進行修補。在我決定使用哪種電池之前,這對我來說很麻煩。當然,只有在訂購完這些組件之后才能開始測試,但是我希望能夠在不尋找電源的情況下自行修改電路板本身。公平地說,如果我剛剛去購買必要的連接器,一對串聯的9伏就足夠了。
無論如何,一旦板子通電,您就需要下載第三方CooCox IDE以及其CoLinkEx USB驅動程序。 CooCox IDE存在一些重大的內存問題,并且僅在關機時才進行分配。這可能是Java的基本問題;我試圖堅持自己。但是,這不是一個大問題,當IDE不可避免地提示錯誤,即內存不足時,只需關閉并重新打開它即可。
一旦平臺啟動并初始化了IDE,下一個步驟是下載PAC5210控制器的庫。第一次啟動IDE時,它將要求您加載庫并列出它可以訪問庫的某些芯片和板。如果需要返回到此頁面,可以轉到“查看”下拉菜單,然后選擇“存儲庫”。在列表中尋找Active-Semi;它應該在底部。如果未顯示,請單擊窗口右上方的刷新按鈕。單擊Active-Semi之后,選擇適當的控制器;然后單擊“確定”。我正在使用PAC5210。您將需要的主要庫是“ CMSIS Core and BOOT”以及Active-Semi庫“ LIB”。下載并添加這些內容后,您將擁有進入下一部分的所有內容。
第4步:計時器,PWM等。..
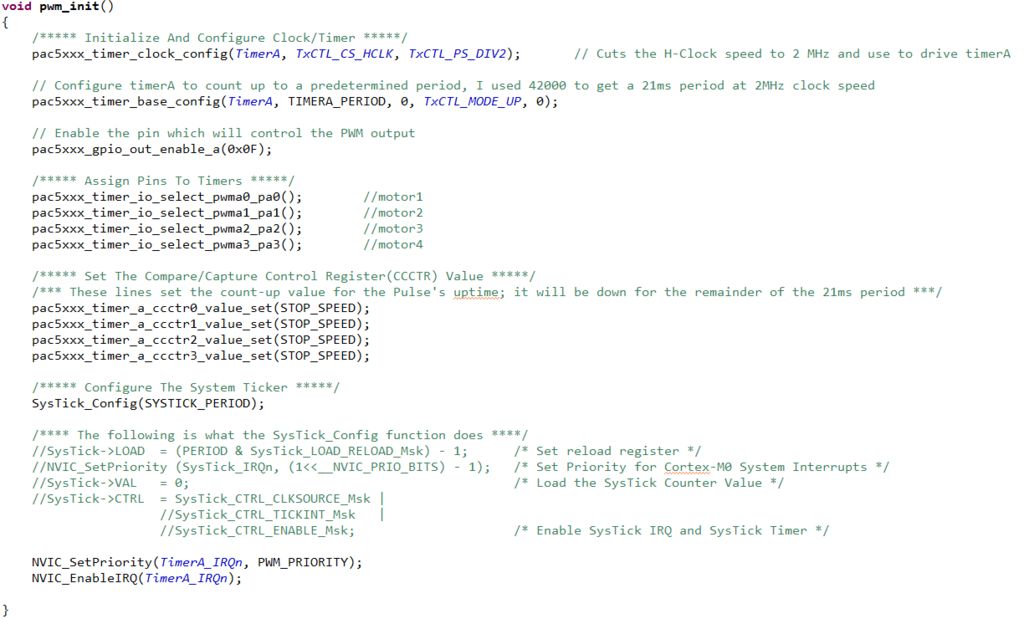
本節將討論如何使用PAC的時鐘和計時器來初始化PWM輸出。
PAC的一大特色是它具有大量的PWM輸出和數量。可用于運行其他中斷驅動功能的單獨計時器。控制器具有一個以4MHz運行的振蕩器,并驅動兩個獨立的時鐘,每個時鐘都可以由內部PWM引擎中的四個定時器用作參考。該引擎使用計時器生成其14個PWM輸出。
在低電壓和高電壓模式下,該板均會生成5V,3.3V和1.8V輸出,以為外圍設備和組件供電。
上面的圖片是我用來設置PWM輸出的代碼示例。您可以對timerB,C和D進行相同的操作。也可以將HCLK或ACLK用于時鐘配置。而且時鐘輸入最多可被分頻為2 ^ 7。
您會注意到有一塊代碼引用了系統代碼。此股票代碼是一個內部計時器,可用于定期觸發事件。我用它每10ms更新一次我所有電動機的速度。 ESC每21 ms僅收到一個新的脈沖寬度,因此10ms速度更新應始終及時更新PWM輸出。
步驟5:通信
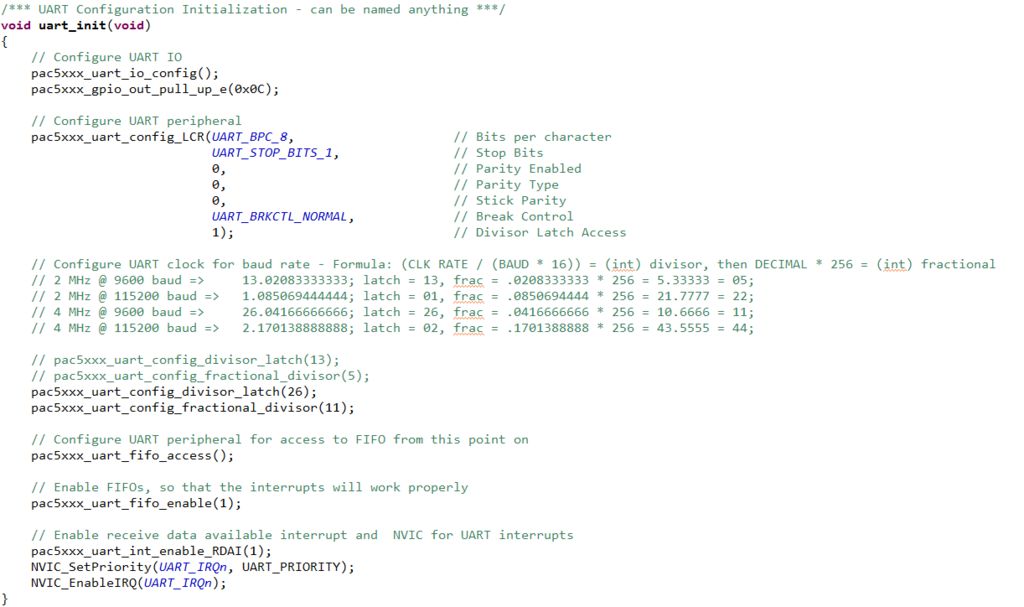
本節將概述UART外設以及如何在PAC5210上設置rx/tx。
UART外設已連接到PE2和PE1板上的rx/tx端口。在此處連接RF接收器或藍牙模塊。該板默認設置為將UART連接到USB,因此您可以在進行無線通信之前調試通信代碼。 HydraX平臺中間有一塊,有4個開關。前兩個對應于UART鏈接,并且通過更改這兩個開關,可以使PE1和PE2與UART外設通信。
上面的第一張圖片顯示了我用于配置UART的代碼。我還有一些鎖存器和分數除數的示例計算,用于描述UART外設的系統配置。
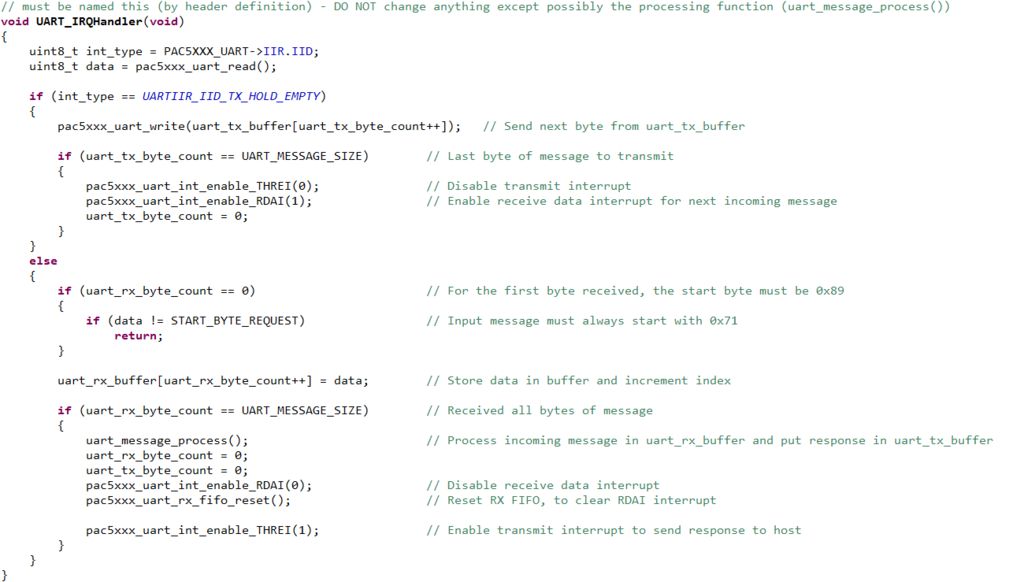
配置完成后,您需要定義一個處理程序,只要觸發UART中斷,該處理程序就會被調用。它的名稱必須定義為:void UART_IRQHandler(void)。這是觸發UART中斷時系統尋找的東西。下一張圖片顯示了Max指導我的更多代碼。
最后一步是編寫處理輸入消息的函數。在上面的代碼中,此函數稱為uart_messgae_process(),但可以命名為任何東西。您將需要具有一個開關或某些其他流控制結構,這些結構將根據接收到的數據唯一地執行。在處理結束時,您應該生成一條返回消息以提供有關所發生情況的反饋。傳入和傳出消息都應具有一個“開始消息”字節,該字節告訴哪個設備正在接收消息的開始位置。接下來,應該包括狀態消息,然后是要發送的任何數據。最后,應采用某種數據驗證/確認方法以確保傳輸在途中不被破壞。我使用消息的8位總和作為校驗和,并將其保存在消息的最后一個字節中。
通信的下一部分是將無線收發器設置為在收發器中發送和接收消息。 UART代碼中描述的格式。有很多可用于編寫藍牙應用程序的指南,大多數收發器消息處理與UART消息處理類似,因此,我將由您自定義該部分。
步驟6:結束構建
安裝了所有軟件后,剩下的就是電路了。評估套件隨附一個原型板,可用于在連接到HydraX平臺之前確定連接方向。
請注意:HydraX平臺沒有緩解電流過載的電路,因此您需要確保所有連接線都已妥善存放,以防止輸入和輸出意外交叉。如果您確實收到了簡短的提示,那么董事會就死定了。我建議不要再加電。某些組件可能是從油炸板上搶下來的。
當然,在進行連接之前,您需要確定要使用的引腳。請記住,多軸直升機很容易受到其重心變化的影響,因此您要確保每個組件盡可能地平衡。修剪電線,直到結構緊湊,不會對多旋翼飛機周圍的氣流產生負面影響。最后但并非最不重要的一點是,貼花,玩得開心,并準備打動所有女士,因為您有翅膀!其中四個。
責任編輯:wv
-
四軸飛行器
+關注
關注
55文章
206瀏覽量
51927
發布評論請先 登錄
**無人機飛控如何靠三軸MEMS陀螺儀實現穩定飛行?**
深謀飛行器總工兼合伙人陳春軒攜「星曜風」產品矩陣 破局低空經濟萬億風口

小馬哥STM32F1主控720空心杯四軸飛行器資料(包含源代碼和相關教程)
Vicor高密度電源模塊助力輕型飛行器設計
小型飛行器專用 AS-DR01模擬信號AI識別跟蹤模塊

《手把手教你做星閃無人機—KaihongOS星閃無人機開發實戰》系列課程課件匯總

激光毀傷系統:低空飛行器的 “隱形獵手”
飛行汽車興起,連接器/線纜將面臨哪些挑戰?
MATLAB在低空飛行器中的應用

欣旺達:已具備低空飛行器電池研發生產能力
嵌入式學習-飛凌嵌入式ElfBoard ELF 1板卡-運動追蹤之六軸傳感器使用場景
飛凌嵌入式ElfBoard ELF 1板卡-運動追蹤之六軸傳感器使用場景
利用圖像處理板避障 讓小型飛行器像昆蟲一樣靈巧





 工商網監
工商網監
評論