") 如何制作一只會喝水的機器鳥
如何制作一只會喝水的機器鳥

步驟1:組裝變速箱
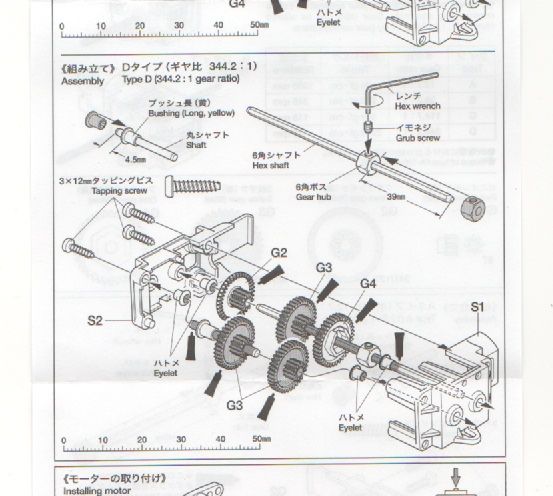
選擇344.2:1傳動比,這是最大戰(zhàn)俘er和最低速度。
您可以購買組裝好的齒輪箱,也可以從舊的遙控車上使用齒輪箱。如果速度要快,則可以隨時降低電動機的電源電壓。
步驟2:為小鳥創(chuàng)建支架
支架主要由2毫米硬線制成。它長10厘米,寬10厘米,高16厘米。
步驟3:創(chuàng)建鳥的尸體
鳥的高度為30厘米,主要由2毫米的硬線制成。
將鳥制成后,用0.9毫米的線將其連接至齒輪。
嘗試使鳥形體盡可能小,但要確保其觸碰電線端子。使用1.5毫米金屬線代替2毫米金屬線將減少鳥的體重,并增加了此移動雕塑的實際工作機會,因為小型直流電動機可能無法移動鳥的大體重。
第4步:將鳥連接到支架上
用0.9毫米的導(dǎo)線將鳥連接到支架上。
步驟5:連接電子端子
連接正面和背面端子。后面的端子是由0.9毫米的導(dǎo)線彎曲成半圓形狀(請仔細觀察圖像)。
然后將2毫米的導(dǎo)線連接到前端端子上。
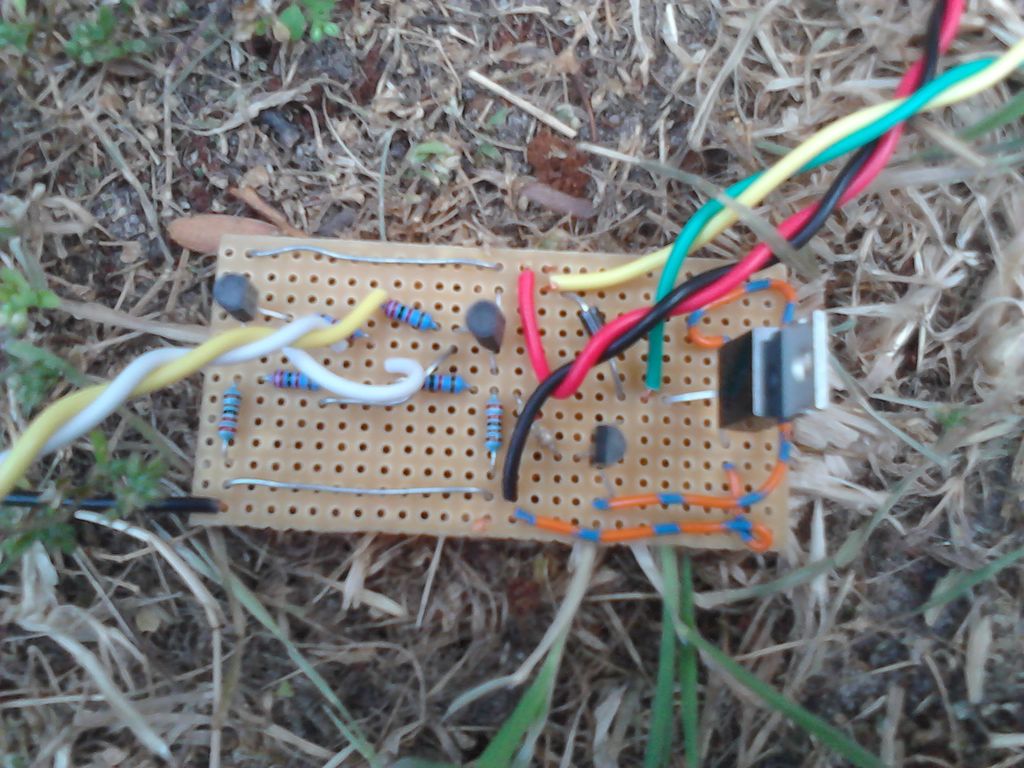
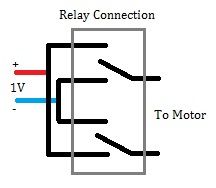
第6步:制作電路
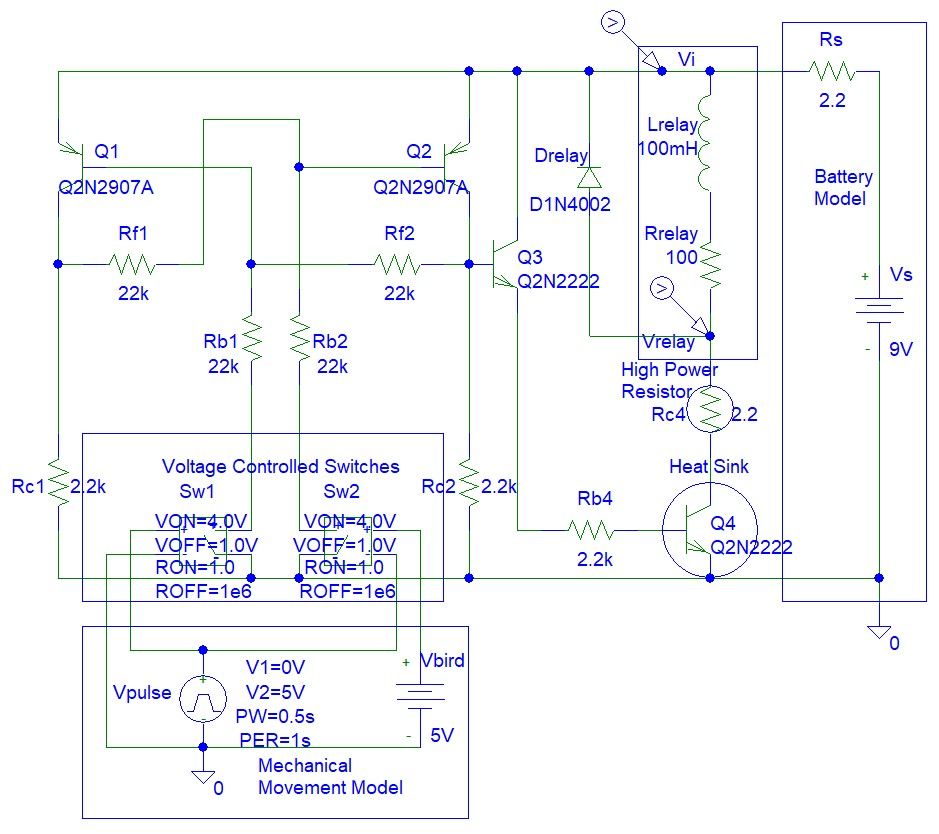
該電路是一個觸發(fā)電路控制繼電器。
“鳥頭”是前端子。
“鳥頭”是后端子連接。
所示電路為顯示兩個電壓控制開關(guān)。實際上,有兩個機械開關(guān)(您在上一步中連接的兩個端子),并且電壓控制開關(guān)僅包含在電路中,因為PSpice軟件不允許使用機械組件,而只能模擬電子或電路。
可能不需要2.2歐姆電阻。如果繼電器具有高電感,并且長時間導(dǎo)通直到短路,則使用該電阻。這可能會燒毀功率晶體管。如果沒有功率晶體管,則要并聯(lián)幾個NPN晶體管,則將所有三個端子相互連接(將基極連接至基極,集電極連接至集電極,并將發(fā)射極連接至發(fā)射極)。此方法用于冗余并減少每個晶體管的功耗。
不包括晶體管上的散熱器。由于晶體管飽和,因此功耗非常低。但是,功耗取決于繼電器。如果繼電器消耗大電流,則應(yīng)包括散熱器。
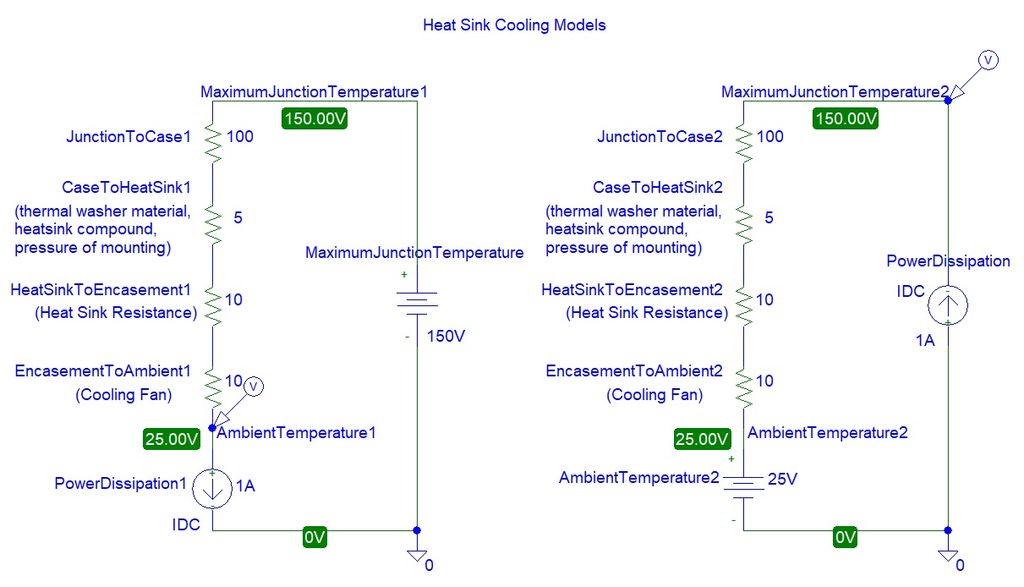
電路仿真中顯示了散熱器的耗散模型。您可以使用兩者中的任何一個。在兩個模型中,電路模擬用于模型溫度。如果沒有冷卻風(fēng)扇并且沒有外殼,則相應(yīng)的耐熱性為零。您必須假設(shè)設(shè)備在包裝盒內(nèi)可能會變熱。功耗是電流,溫度是電勢,電阻是熱阻。
這是您選擇散熱器電阻和散熱器電阻情況的方式:
功耗=飽和期間的Vce(集電極發(fā)射極電壓)* Ic(集電極電流)
Vce(集電極發(fā)射極電壓)= 0.2伏特(大約)。 Ic =(電源-0.2 V)/繼電器電阻(打開時)
您可以連接電流表以檢查繼電器打開時消耗多少電流。
散熱片電阻+外殼對散熱器的電阻=(最大晶體管結(jié)溫度-最大室溫或環(huán)境溫度)/功耗(瓦特)-結(jié)到外殼的熱阻
最大晶體管結(jié)溫度和結(jié)到外殼的熱阻在晶體管的規(guī)格。
散熱片的電阻取決于傳熱化合物,熱墊圈材料和壓力安裝。
因此,功耗越高,則散熱功率越低。散熱片電阻。較大的散熱器將具有較低的耐熱性。
一個不錯的選擇是,如果您不了解這些公式,則選擇具有較低耐熱性的散熱器。
步驟7:安裝繼電器
繼電器不必是高電流繼電器。實際上,它必須是低電流繼電器。但是,請記住,如果由于機械問題(例如齒輪箱問題)而停止運行,電動機將吸收大電流。這就是為什么我決定不使用晶體管來驅(qū)動電機的原因。但是,有H橋晶體管電路和H橋電阻器電路可用于驅(qū)動電動機。
步驟8:連接電源

該項目現(xiàn)已完成。
-
繼電器
+關(guān)注
關(guān)注
133文章
5437瀏覽量
151463 -
直流電動機
+關(guān)注
關(guān)注
7文章
198瀏覽量
23443
發(fā)布評論請先 登錄
海康威視推出大模型探驅(qū)鳥一體機
太陽能激光驅(qū)鳥器,電網(wǎng)防鳥難題這樣解決
電力智能綜合驅(qū)鳥器,如何解決電網(wǎng)防鳥問題
基于俊泰高精度數(shù)字跟蹤系統(tǒng)的機場驅(qū)鳥應(yīng)用解決方案
如何制作和控制一只仿生手

特力康變電站激光驅(qū)鳥器的主要特點都有哪些

揭秘和普威視智能化驅(qū)鳥系統(tǒng),助力航空安全再升級

Pamcrash在飛機鳥撞分析中的應(yīng)用

AI激光驅(qū)鳥器,智能激光多功能驅(qū)鳥器
AI智能激光語音驅(qū)鳥器:智能升級,驅(qū)鳥效果顯著提升

【開源項目】做一只由 OpenCV 控制的仿生手
AI智能激光語音驅(qū)鳥裝置|高效驅(qū)鳥機制|AI智能算法
智能驅(qū)鳥新紀元:變電站電力智能激光驅(qū)鳥器守護電網(wǎng)每一刻


電網(wǎng)桿塔驅(qū)鳥 變電站驅(qū)鳥 AI智能激光語音驅(qū)鳥器





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論