 ARDUINO蜘蛛機器人DIY圖解
ARDUINO蜘蛛機器人DIY圖解
步驟1:什么是“蜘蛛機器人”
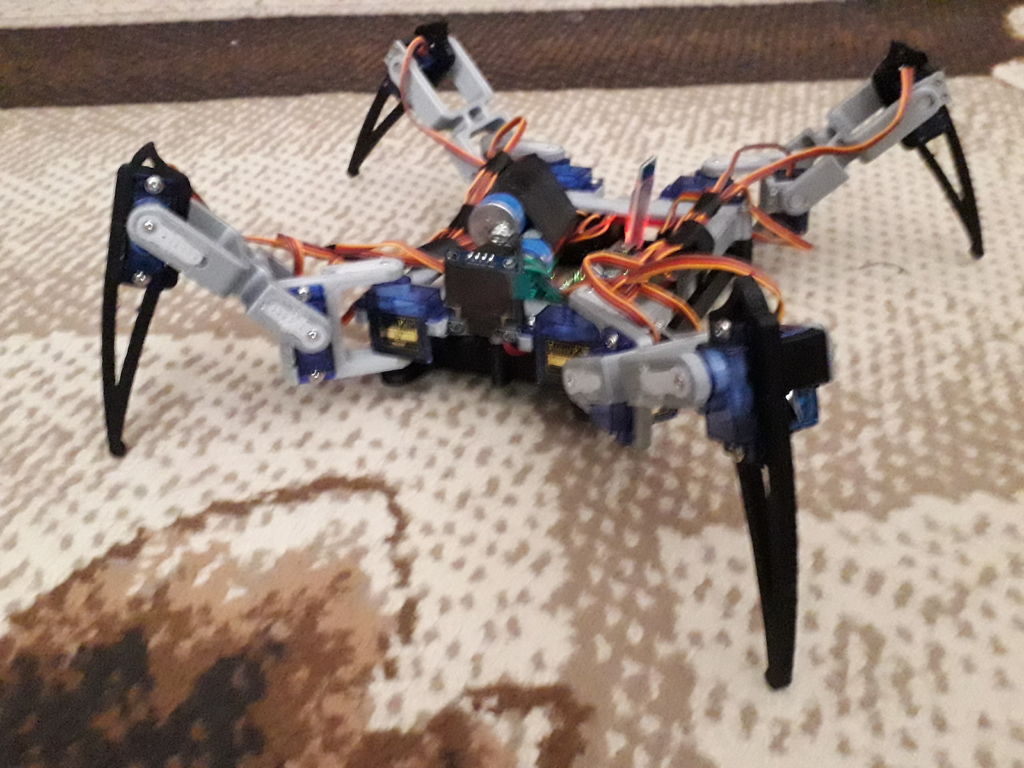
正如其名稱所定義的那樣,我們的機器人是sipder運動的基本表示,但是由于我們只使用四只腳而不是八只腳,因此它不會執行完全相同的身體動作。
也稱為 Quadruped 機器人,因為它有四條腿,并使用這些腿進行運動,每條腿的運動與其他腿相關為了識別機器人的身體姿勢并控制機器人的身體平衡。
帶腿的機器人比帶輪的機器人能更好地處理地形,并以各種動物性的方式移動。但是,這使有腿機器人更加復雜,許多制造商也難以接近。此外,制造商為了制造四足的全身而需要花費的制造成本和較高的費用,因為它基于伺服馬達或步進馬達,并且兩者都比可用于輪式機器人的DC馬達貴。 p》
優勢
您會發現四足動物在自然界中很豐富,因為四條腿可提供被動穩定性,或保持站立而不主動調整位置的能力。機器人也是如此。四腿機器人比腿多的機器人更便宜,更簡單,但仍然可以實現穩定性。
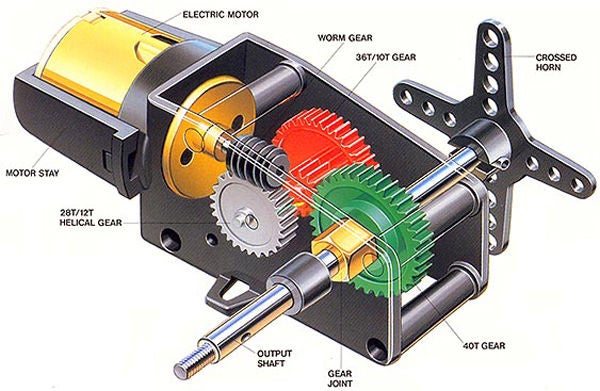
Wikipedia中定義的伺服電機是旋轉致動器或線性致動器,可精確控制角度或線性位置,速度和加速度。 [1]它包括一個與傳感器耦合的合適電動機,用于位置反饋。它還需要相對復雜的控制器,通常是專門設計用于伺服電機的專用模塊。
伺服電機不是特定的電機類別,盡管術語“伺服電機”通常用于表示適用于電機的電機。一個閉環控制系統。
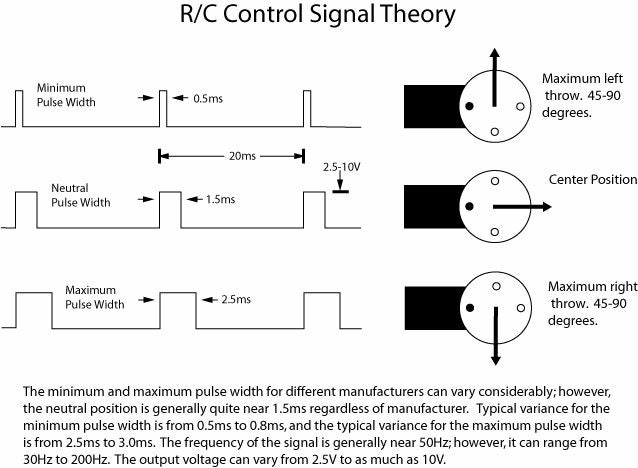
通常來說,控制信號是一個方波脈沖序列。控制信號的常見頻率為44Hz,50Hz和400Hz。正脈沖寬度決定了伺服位置。約0.5毫秒的正脈沖寬度將導致伺服喇叭向左偏斜(通常為45至90度,具體取決于所討論的伺服器)。 2.5ms至3.0ms左右的正脈沖寬度將導致伺服器盡可能向右偏斜。 1.5ms左右的脈沖寬度將導致伺服器將空檔位置保持在0度。輸出高電壓通常介于2.5伏特和10伏特之間(典型值為3V)。輸出低壓范圍為-40mV至0V。
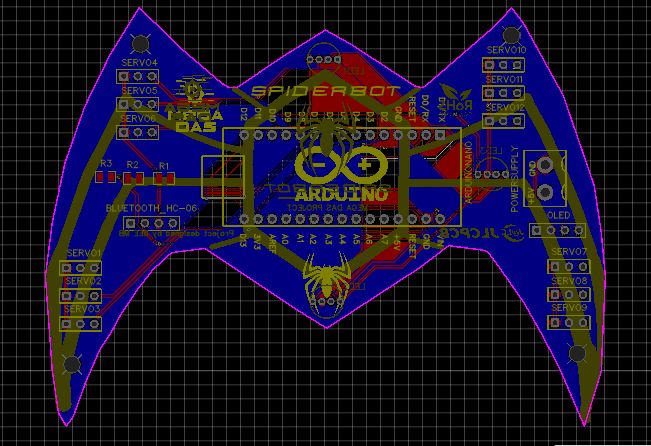
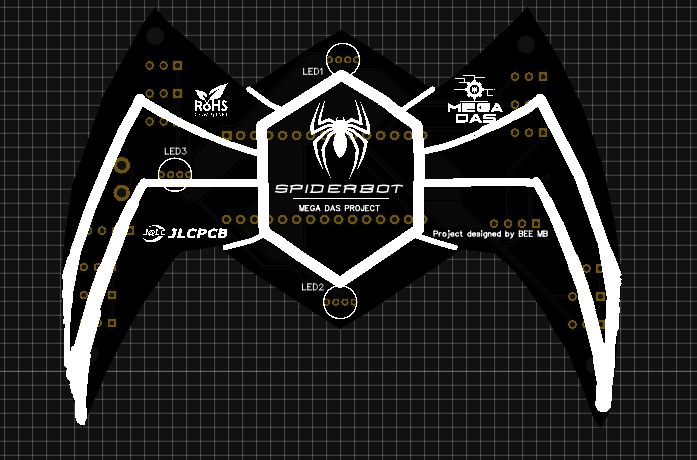
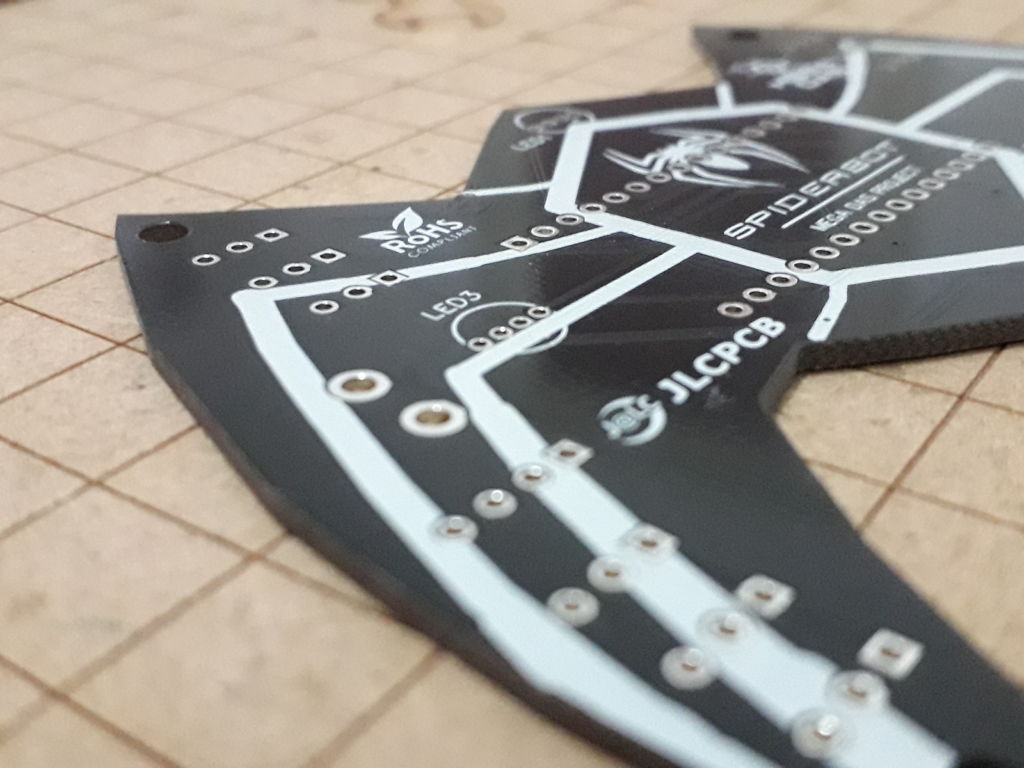
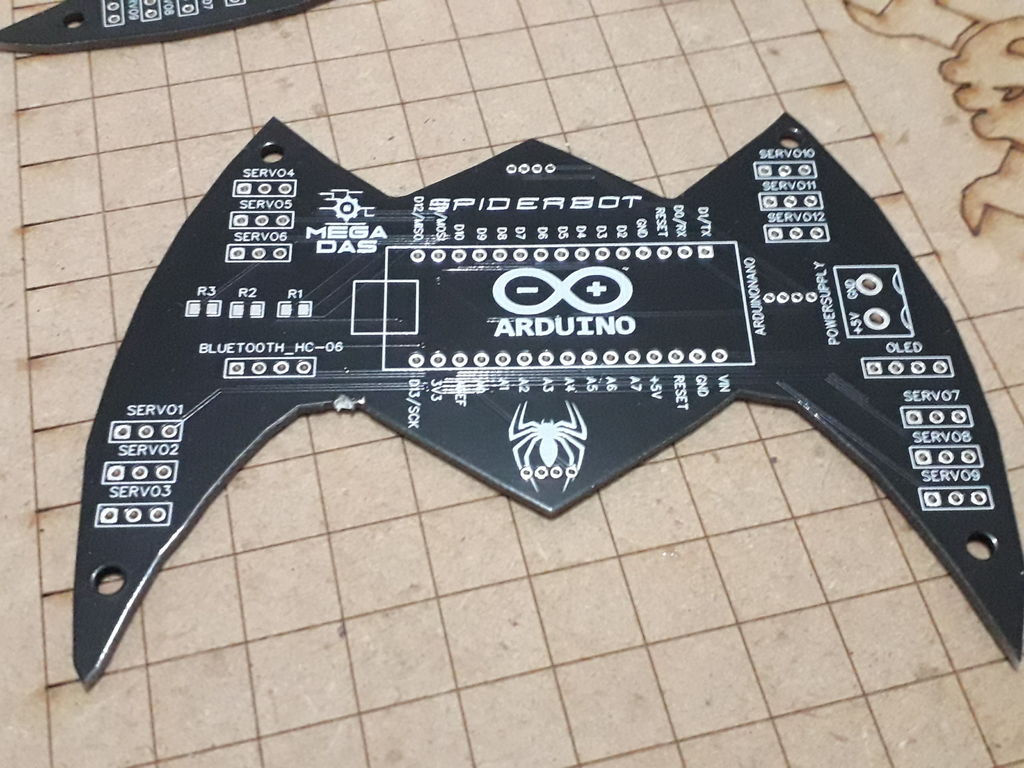
步驟3:PCB制作(由JLCPCB生產)


關于JLCPCB
JLCPCB(深圳佳力創電子科技發展有限公司)是最大的PCB原型企業
JLCPCB擁有10多年的PCB制造經驗,在國內外擁有200,000多個客戶,其中包括每天在線訂購8,000個PCB原型和少量PCB。年生產能力為200,000平方米。適用于各種1層,2層或多層PCB。 JLC是一家專業的PCB制造商,具有大規模,精良的設備,嚴格的管理和卓越的品質。
返回我們的項目
為了生產PCB,我比較了價格我從許多PCB生產商那里選擇了JLCPCB,它是最好的PCB供應商和最便宜的PCB供應商來訂購該電路。我需要做的只是單擊幾下即可上傳gerber文件并設置一些參數,例如PCB厚度顏色和數量,然后我只花了2美元就可以在5天后買到我的PCB。
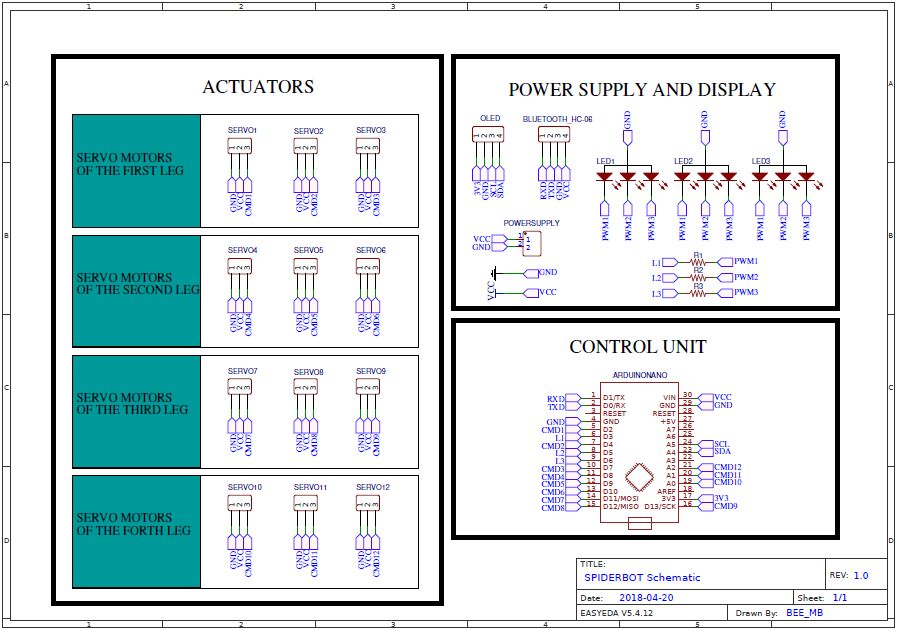
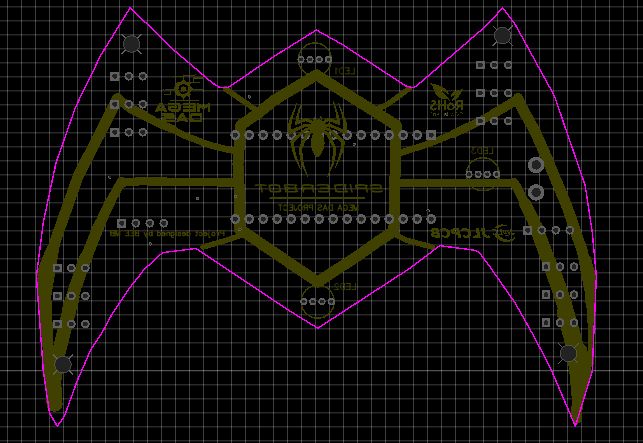
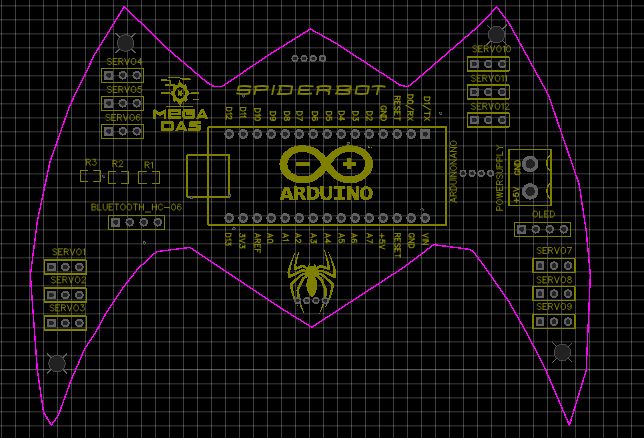
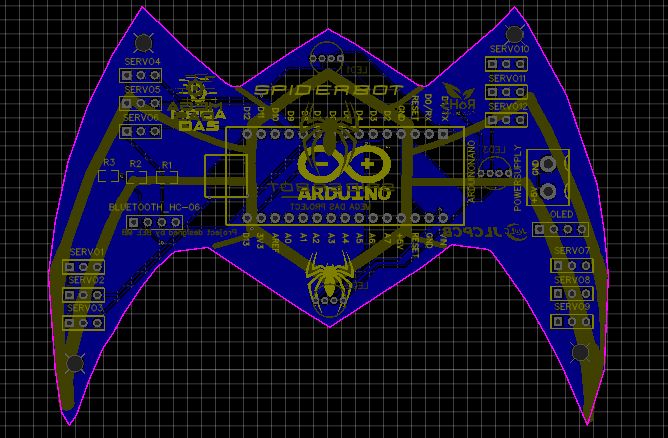
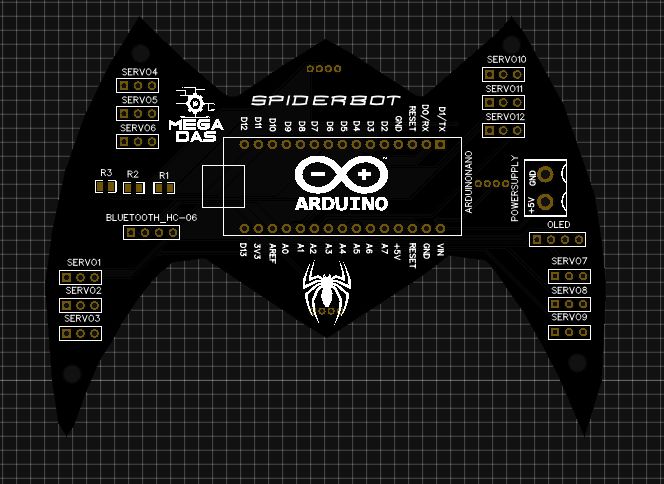
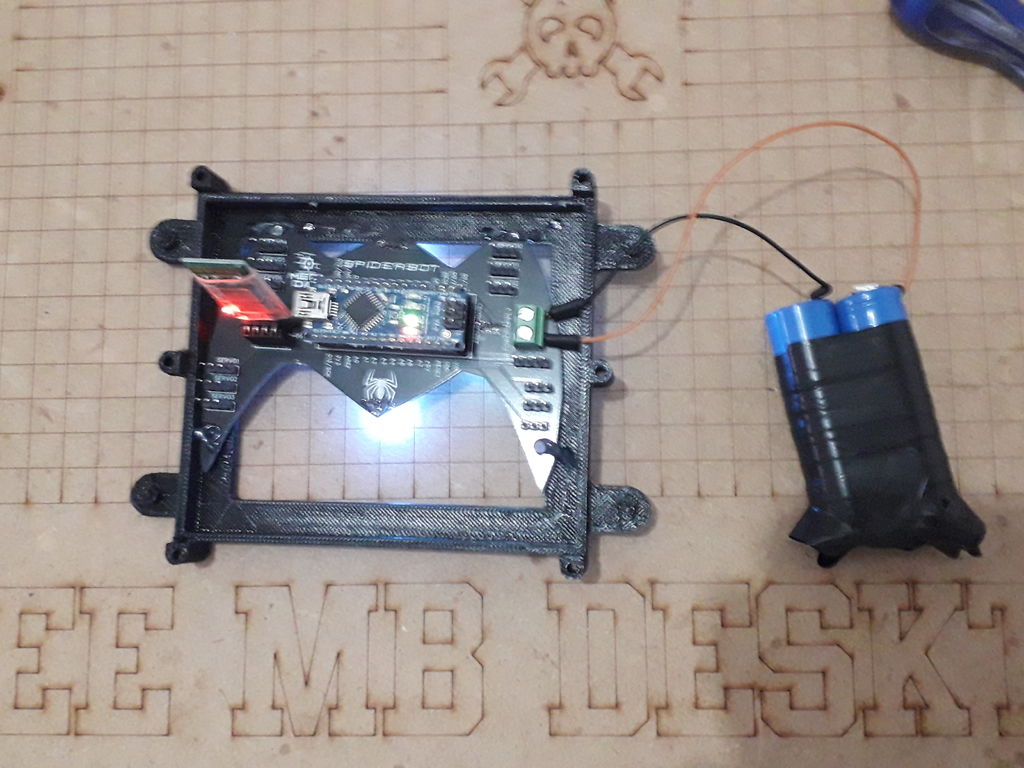
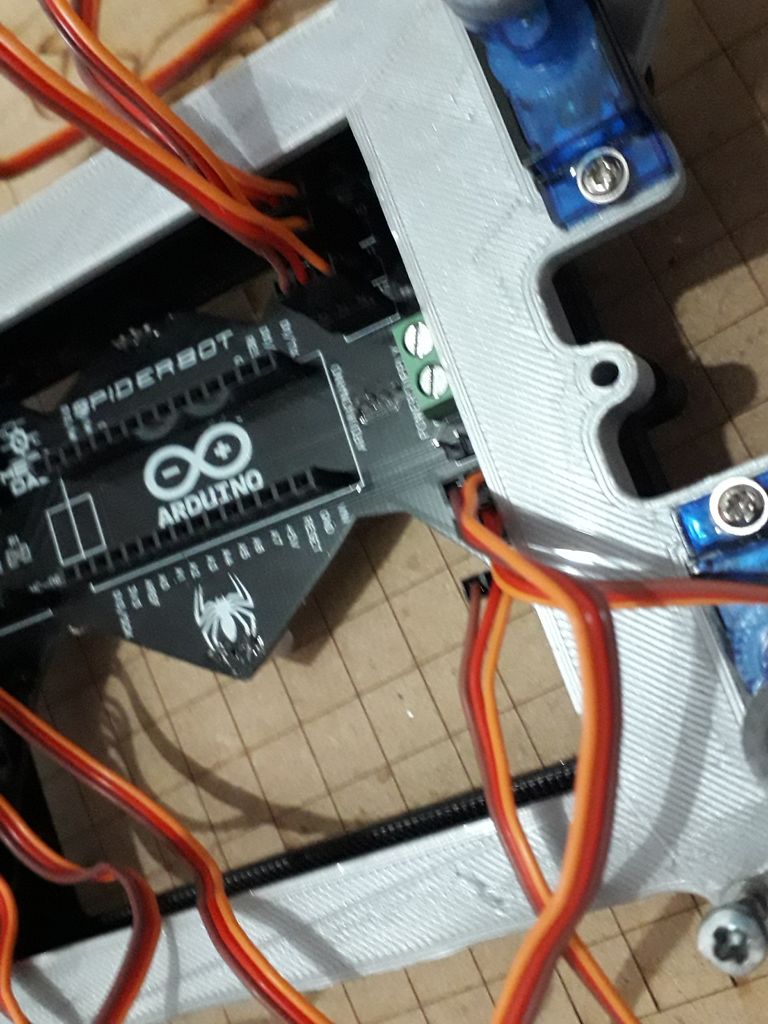
因為它顯示了相關方案的圖片,所以我使用了Arduino Nano來控制整個系統,還設計了機器人蜘蛛形狀來使這個項目更好。
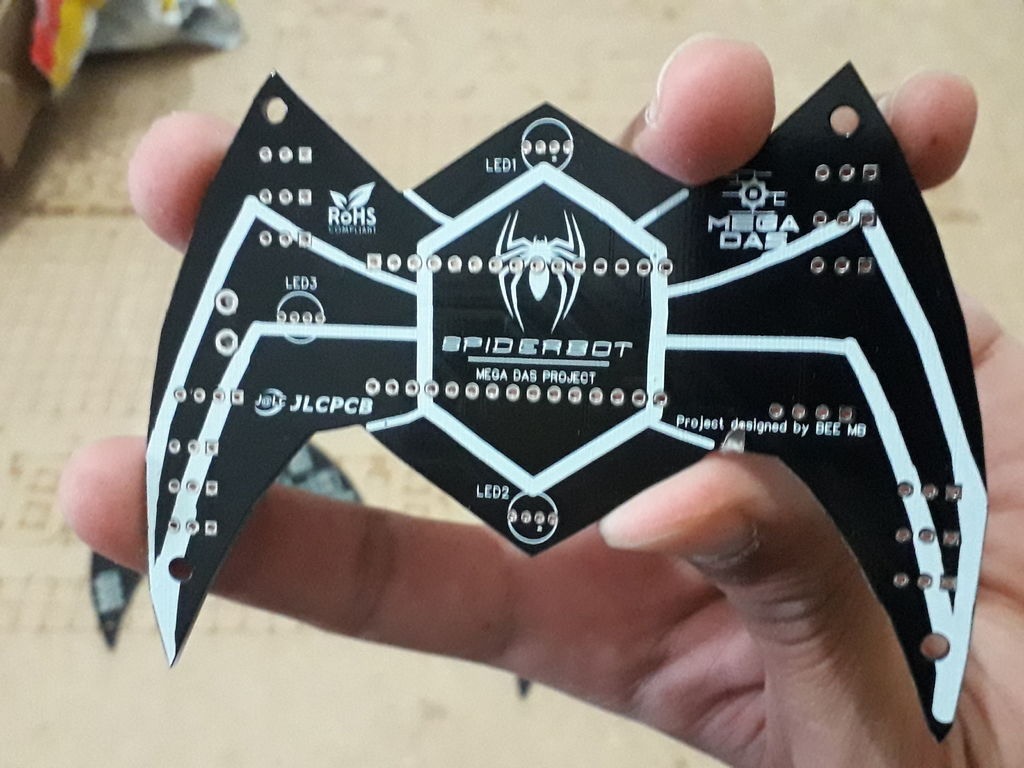
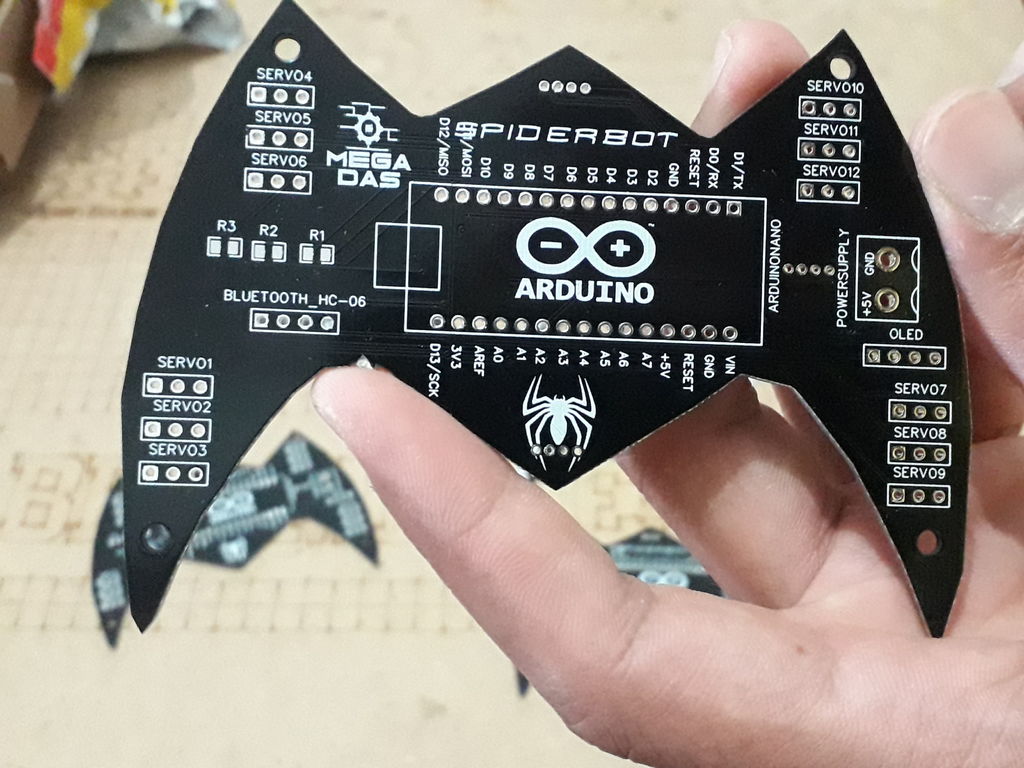
您可以得到電路(PDF)文件從這里。如您在上面的圖片中所見,PCB的制造工藝非常好,并且我擁有與設計相同的PCB蜘蛛形狀,并且所有的標簽和徽標都可以在焊接步驟中為我提供指導。
如果您要訂購同一電路設計的訂單,也可以從此處下載此電路的Gerber文件。
步驟4:配料
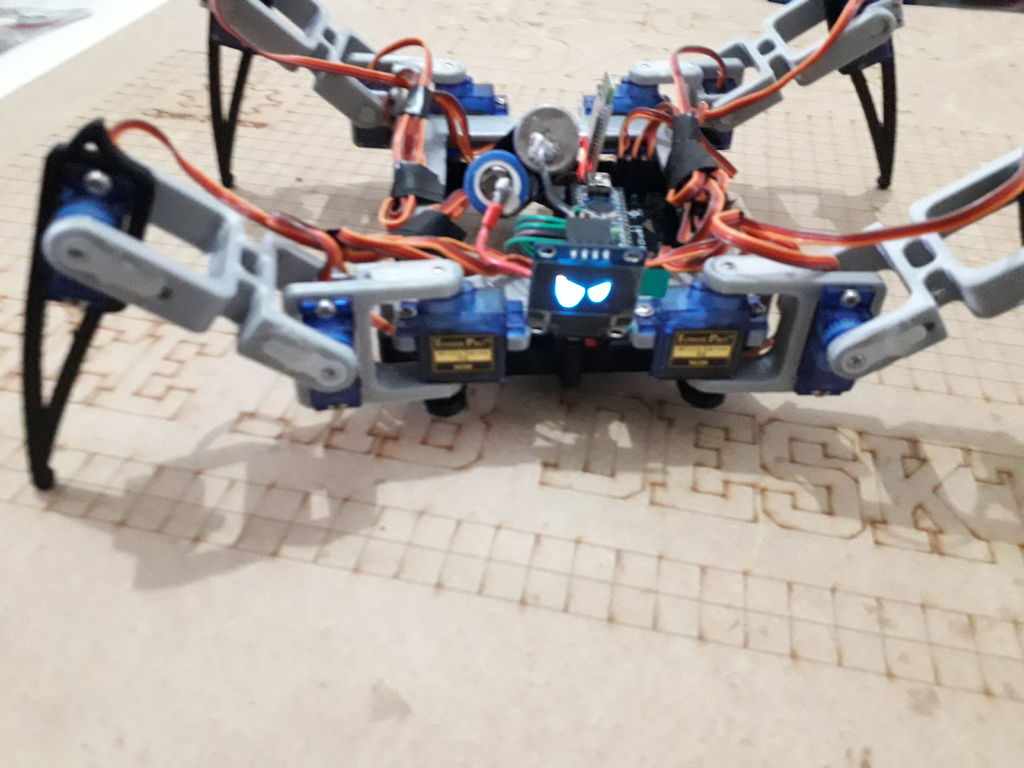
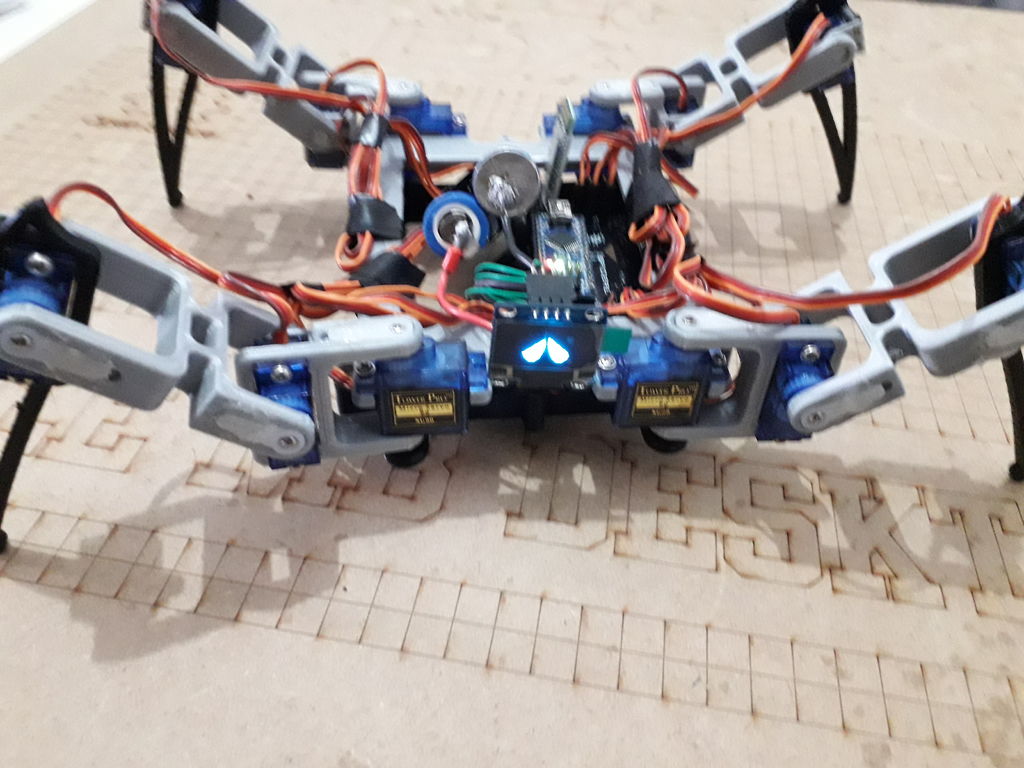
現在讓我們回顧一下該項目所需的必要組件,因此我我已經說過,我正在使用Arduino Nano來運行機器人的所有12個伺服電機的四個腿。該項目還包括一個可顯示Cozmo人臉的OLED顯示屏和一個通過Android應用程序控制機器人的藍牙模塊。
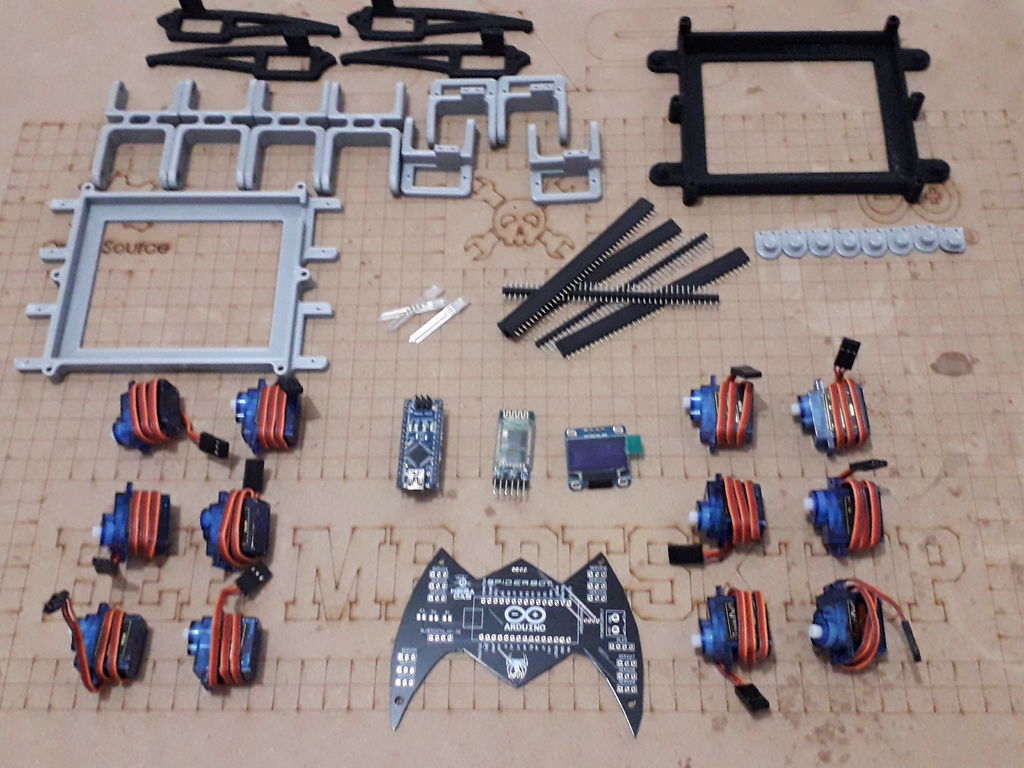
要創建此類項目,我們將需要:
-我們已從JLCPCB訂購的PCB
-12臺伺服電機,您記得每條腿有3個伺服器:https://amzn.to/2B25XbG
-一個Arduino Nano:https://amzn.to/2MmZsVg
- HC-06藍牙模塊:https://amzn.to/2B1Z3CY
-一個OLED顯示屏:https://amzn.to/2OySnyn
- 5毫米RGB LED:https://amzn.to/2B56hq3
-某些標頭connetcors:https://amzn.to/2nyZg7i
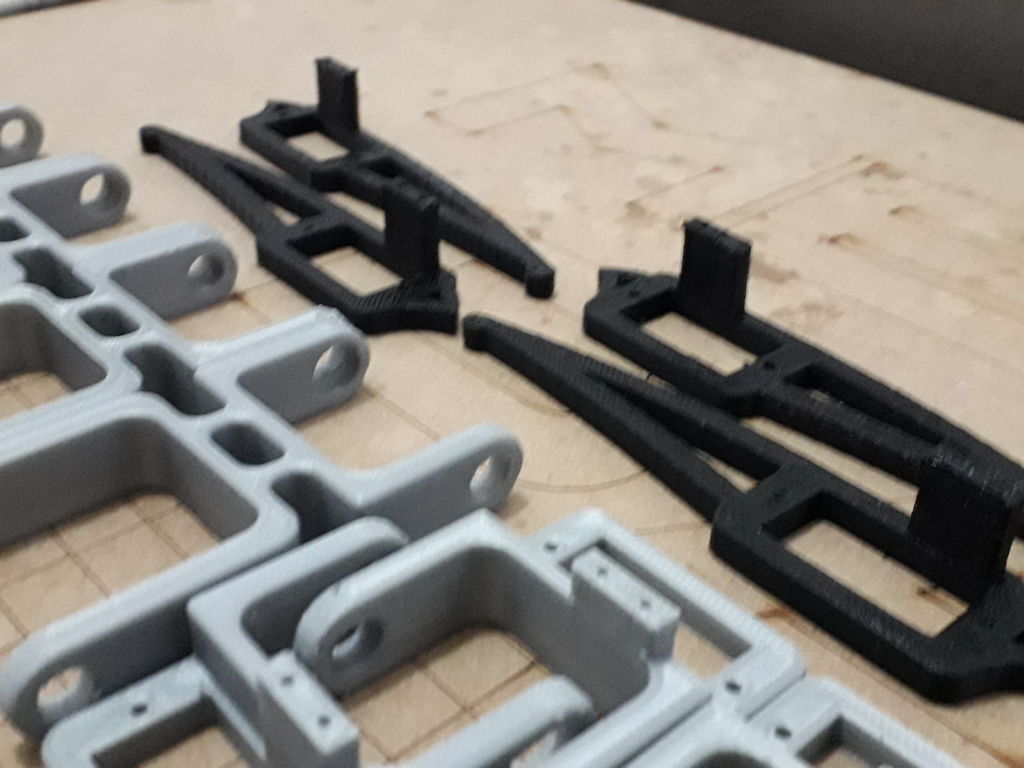
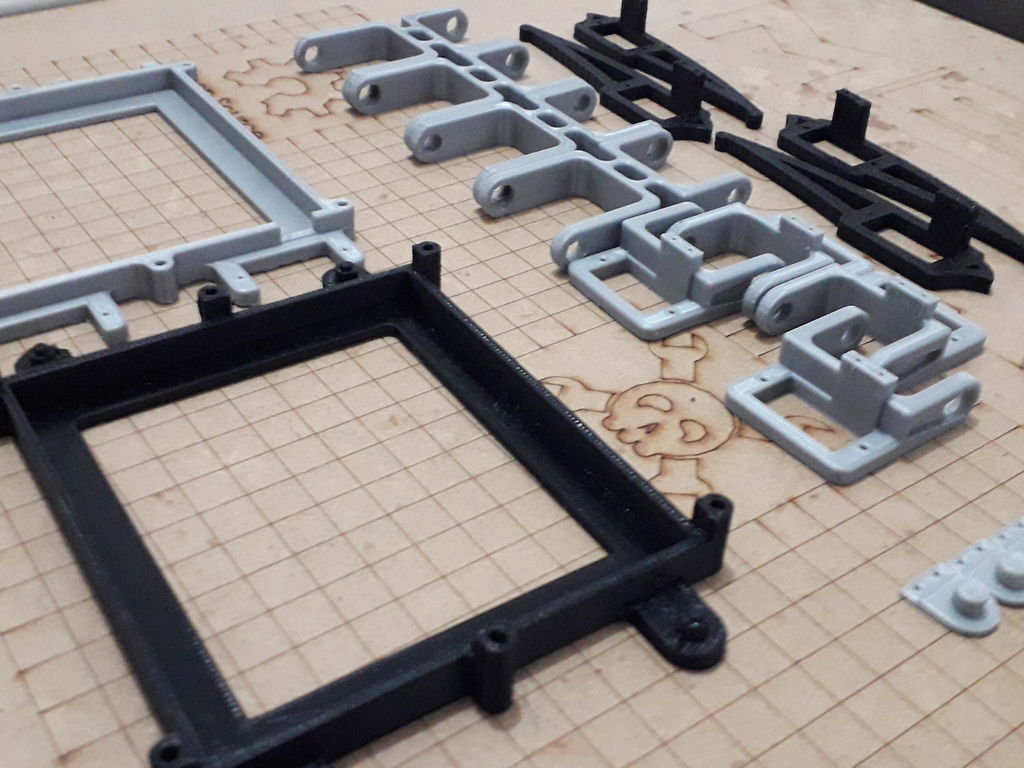
-然后,您需要使用3D打印機打印它們的機器人主體和平度
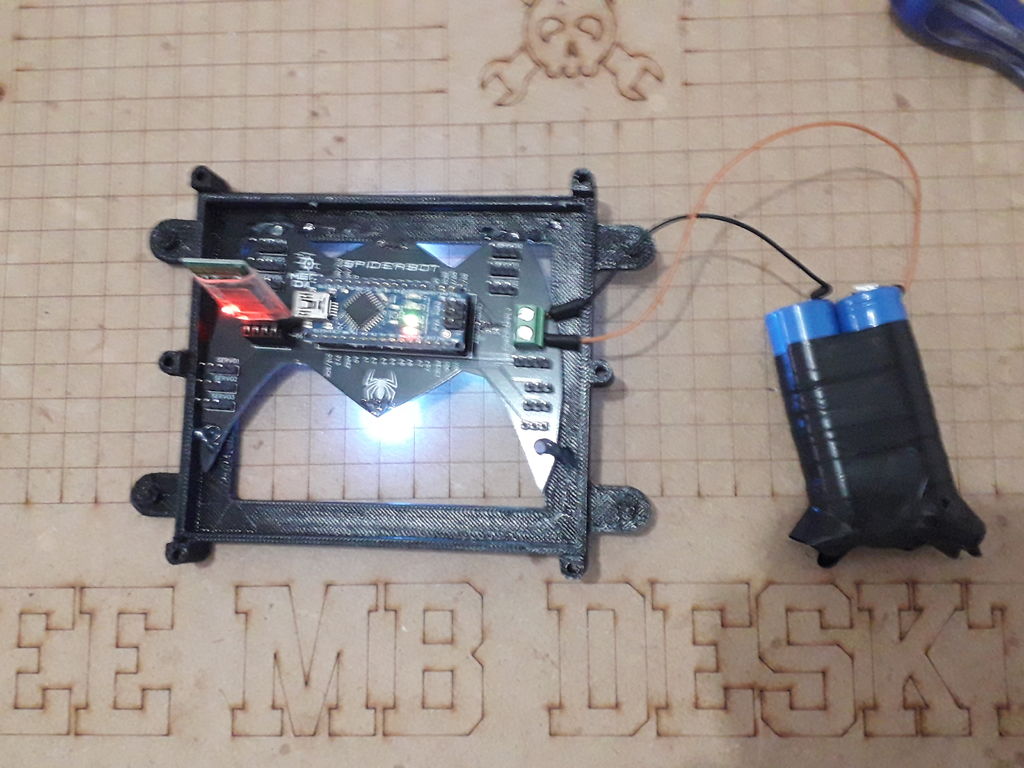
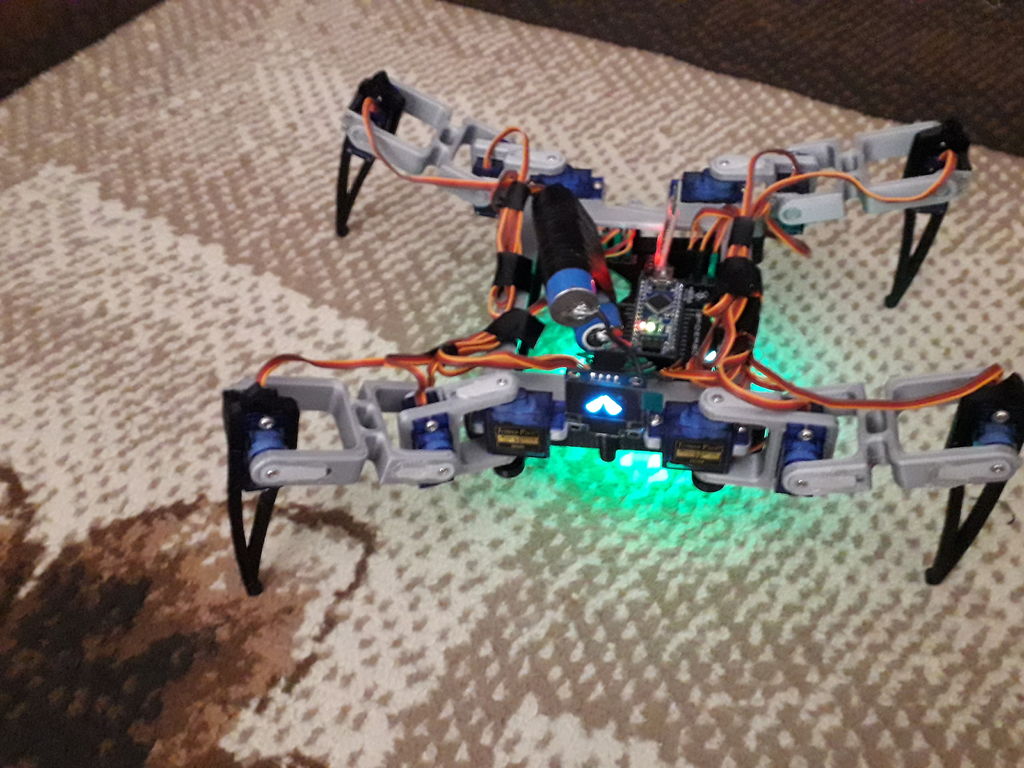
第5步:機器人組裝

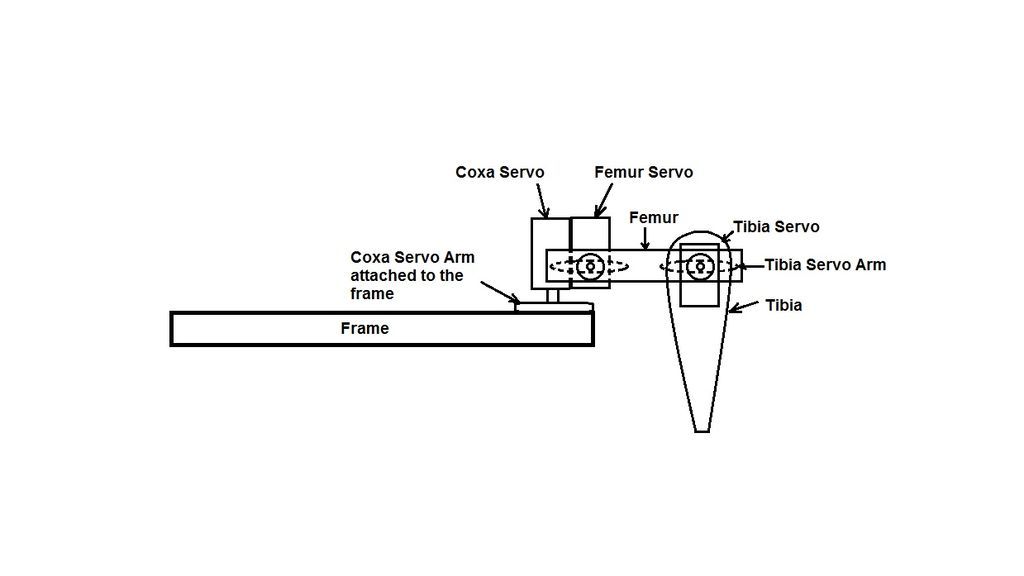
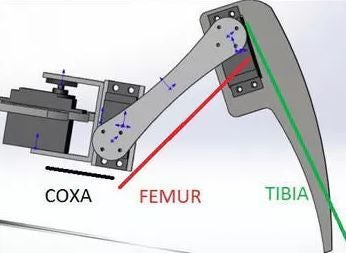
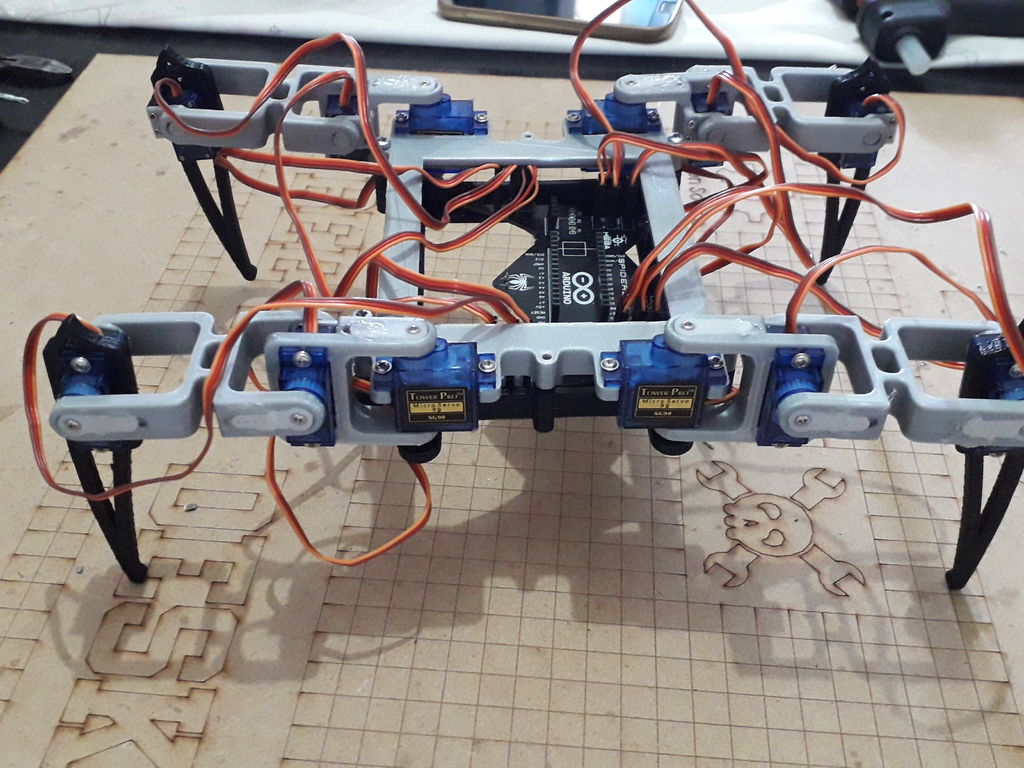
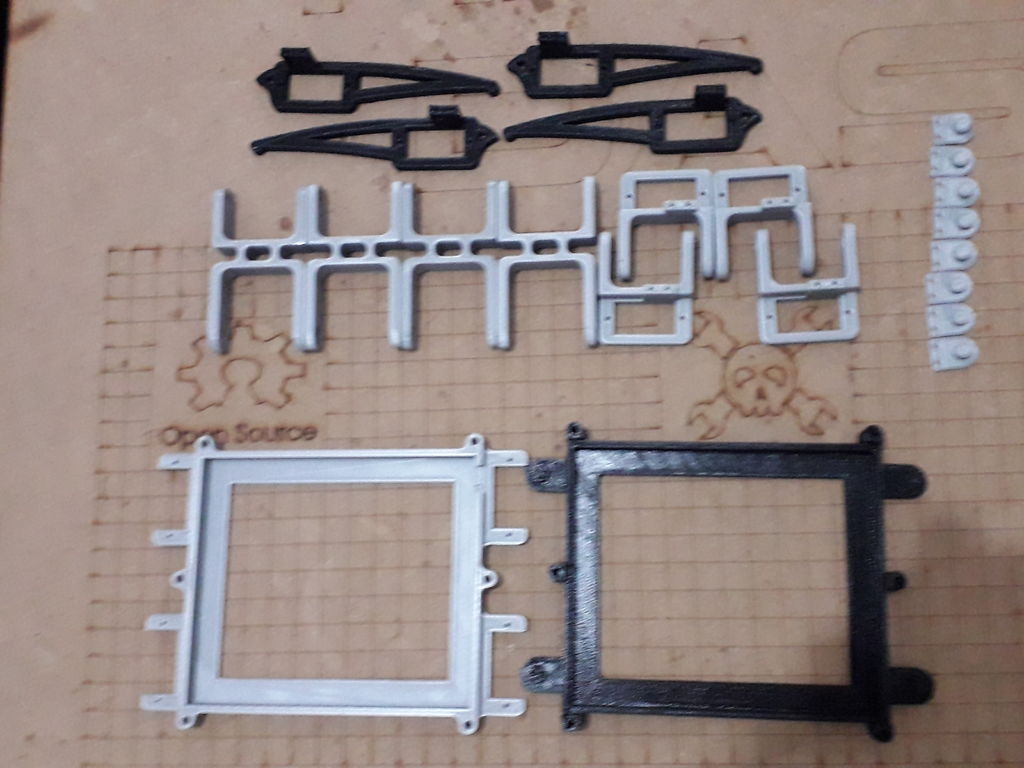
現在我們已經準備好PCB并焊接好所有組件,之后我們需要組裝obot body,操作過程非常簡單,因此只需按照我演示的步驟進行操作,我們首先需要準備每條腿的一側,并使其成為引線,我們需要兩臺伺服電機來進行連接,并為此制作Coxa,Femur和Tibia印刷零件小附件。
關于機器人的車身零件,您可以從這里下載其STL文件。
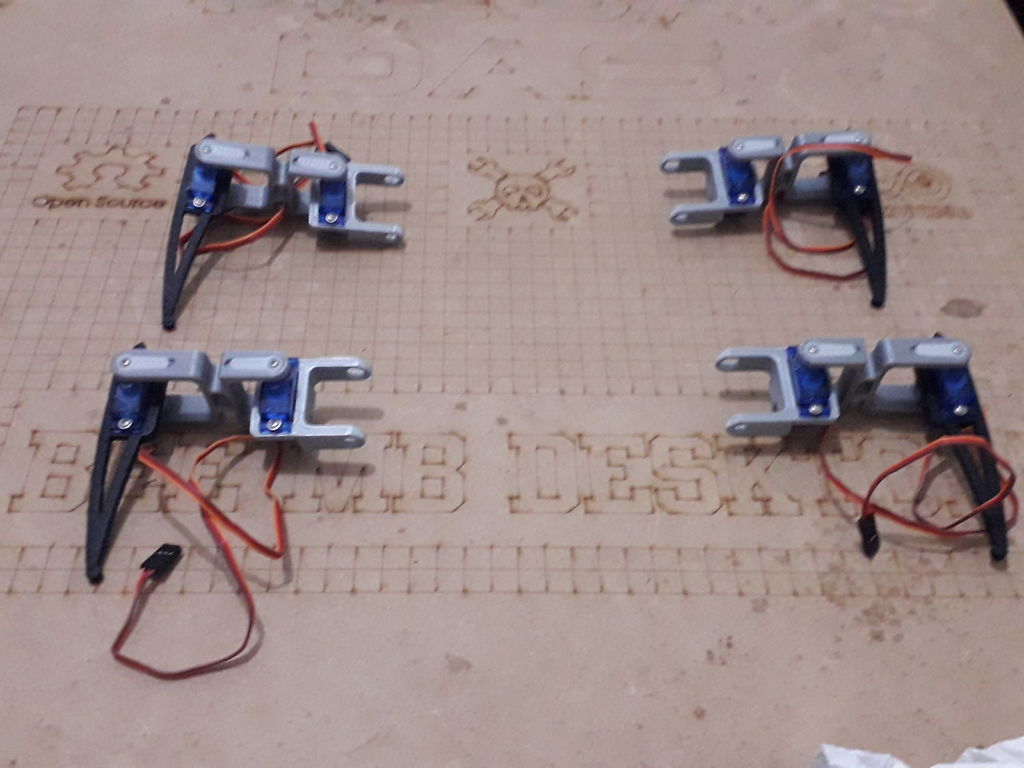
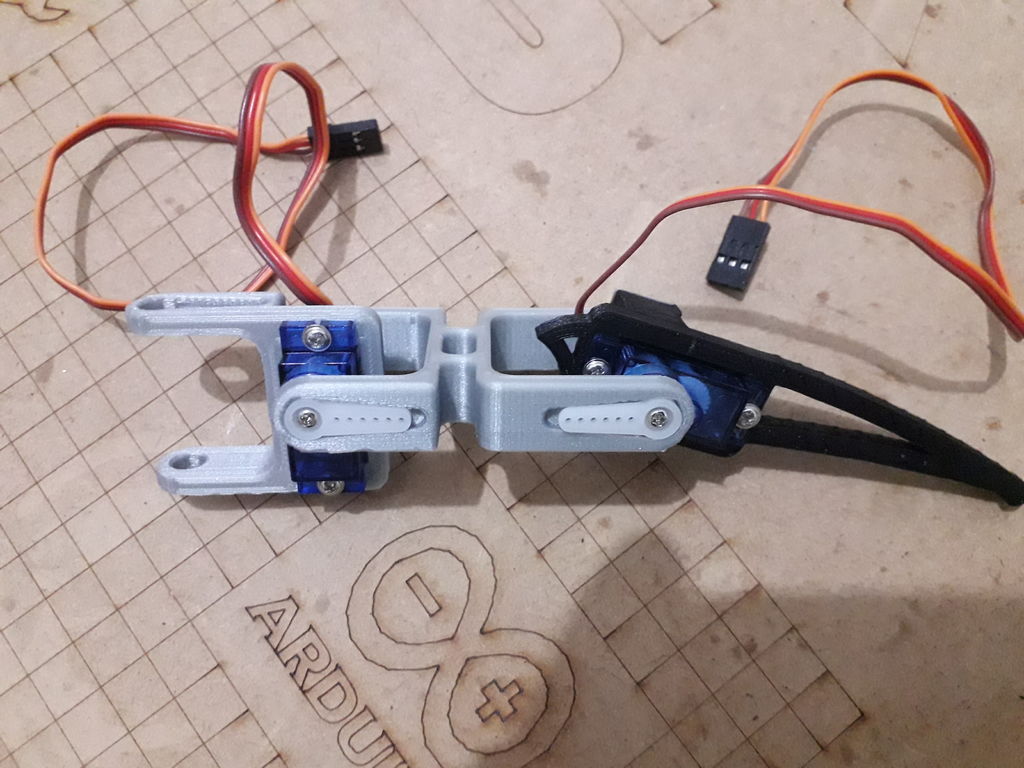
從第一個舵機開始,將其放置在插槽中,并用螺釘將其固定,之后,將伺服軸旋轉至180°,而無需放置用于連接的螺釘,然后移動到下一個部位,即股骨,使用第一個伺服關節軸和連接件將其連接到脛骨。完成腿部動作的最后一步是放置第二個關節,這意味著第二個伺服器將腿部的第三部分固定在Coxa上。
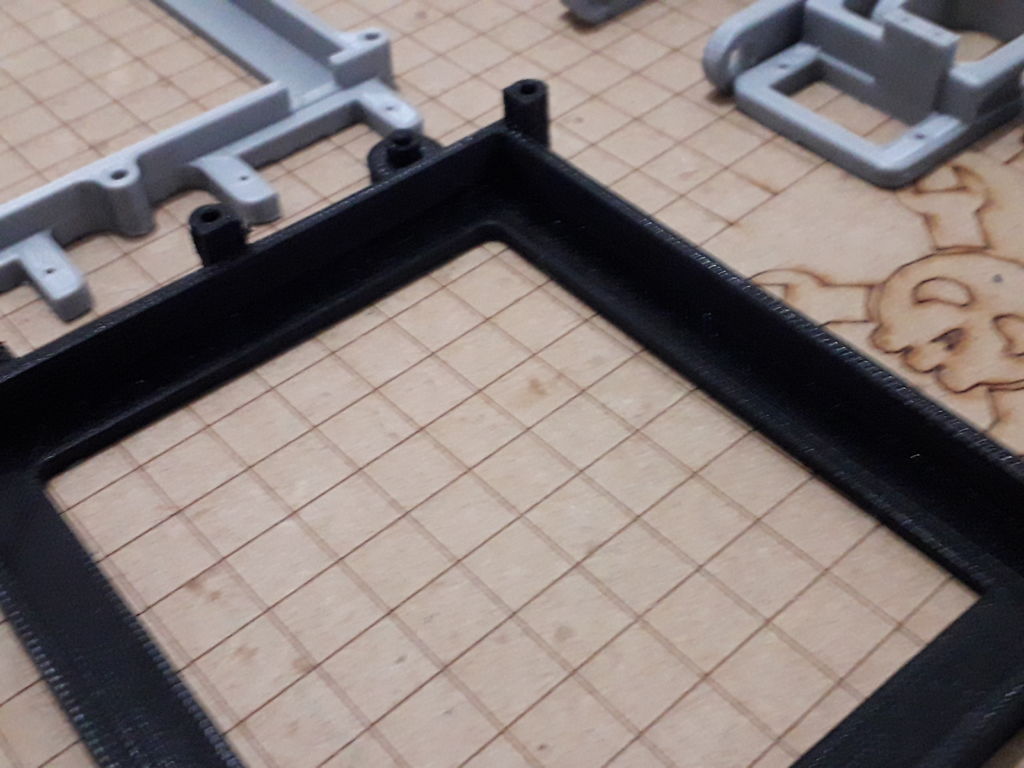
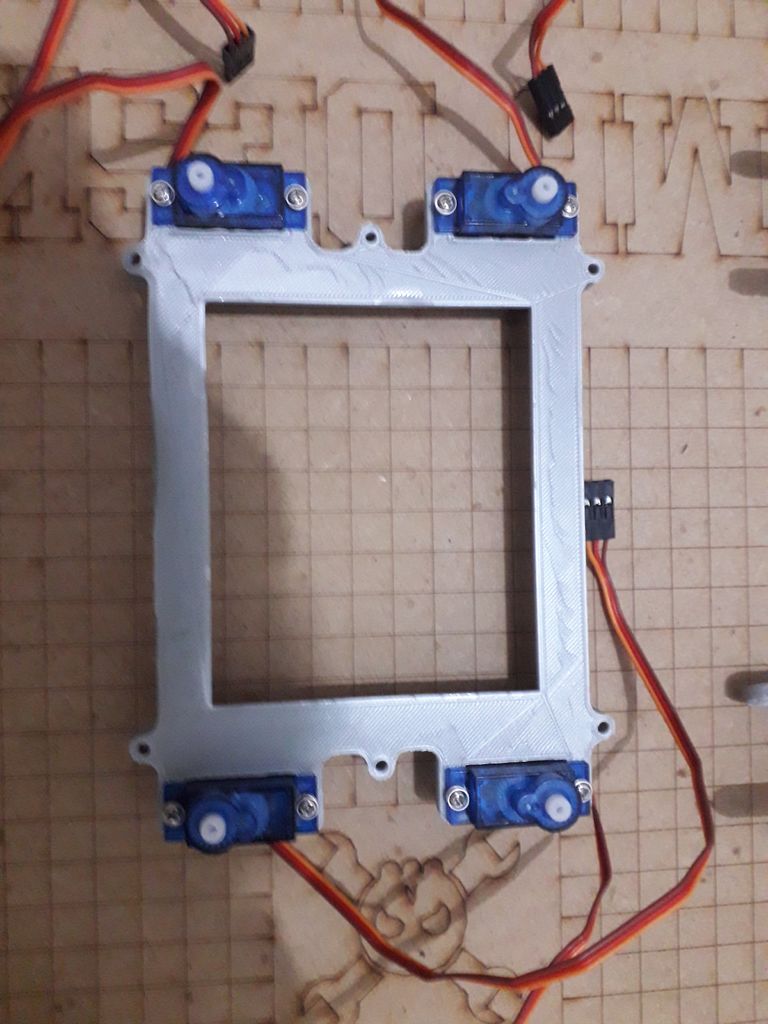
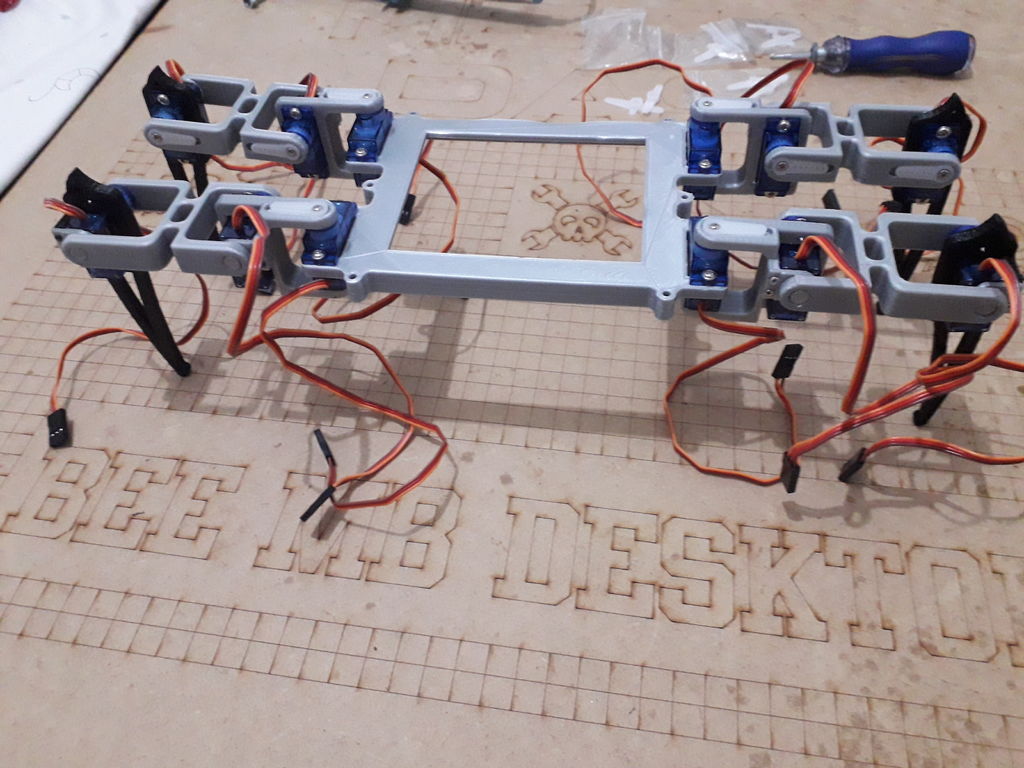
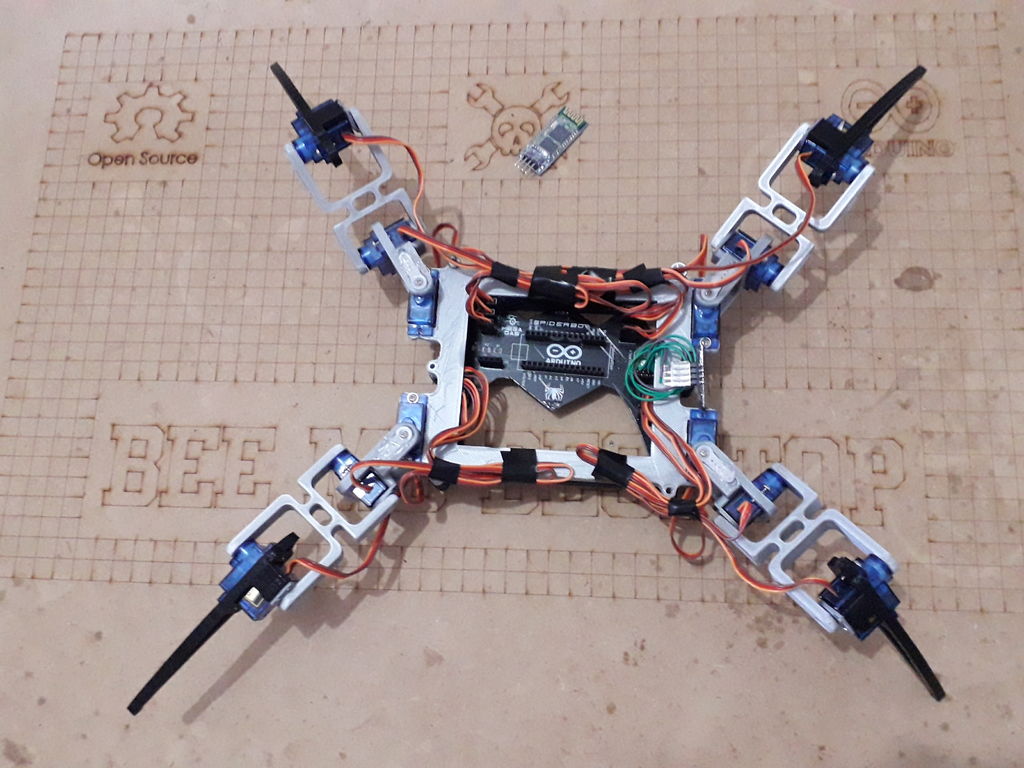
現在,對所有腿部重復相同的操作,以得到四個腿部準備好了。之后,拿起上機架并將其余的伺服器放入它們的插座中,然后將每條支腿連接到適當的伺服器上。最后只有一個印刷部分是機器人底部的機箱,我們將在其中放置電路板
步驟6:Android應用。

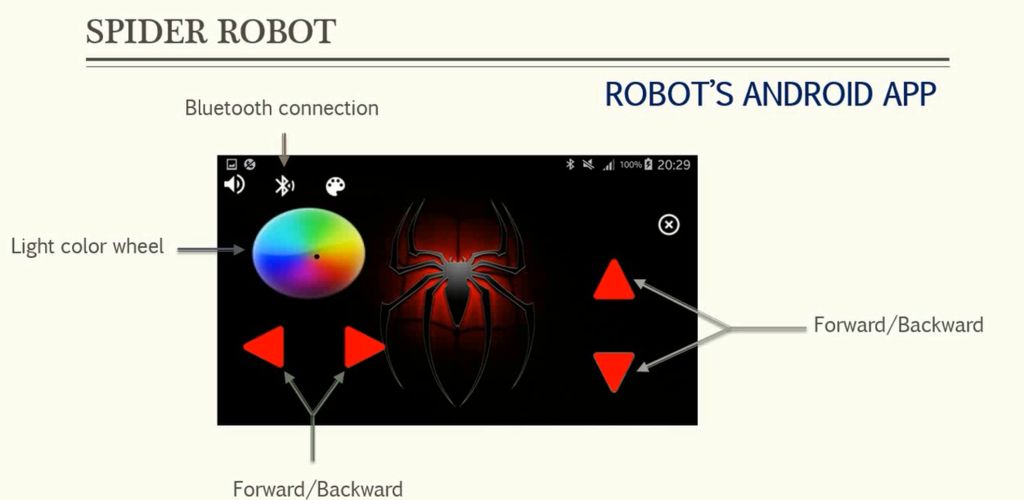
在談論Android時,您可以通過藍牙將其連接到機器人
,并進行向前和向后的運動以及向左和向右的轉彎,還可以控制通過從此色輪中選擇所需的顏色來實時顯示機器人的燈光顏色。
您可以通過以下鏈接從此鏈接免費下載android應用:此處
步驟7:Arduino代碼和測試驗證
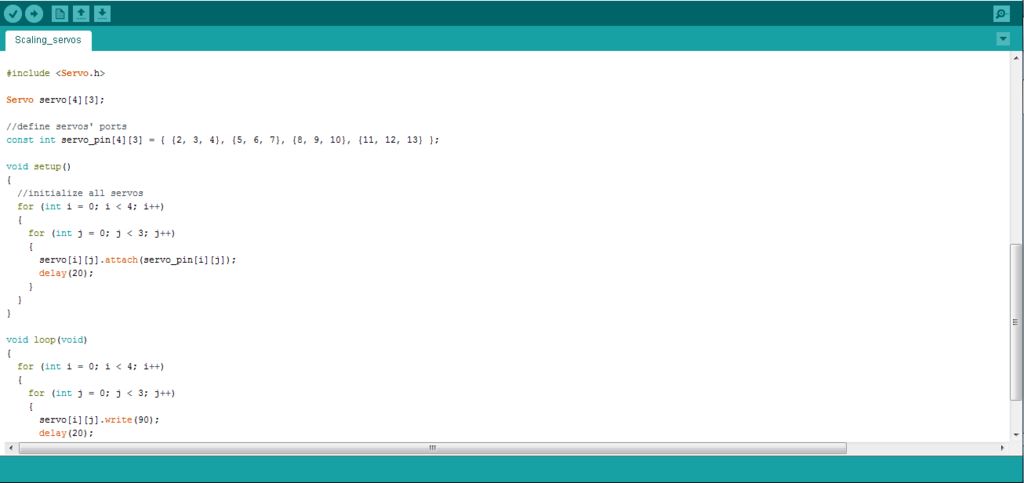

現在我們已經準備好運行機器人了,但是我們需要先設置關節角度,因此請上傳設置代碼,該代碼可讓您將每個伺服器放入通過將伺服器以90度角安裝在正確的位置,請不要忘記連接7V DC電池以運行機器人。
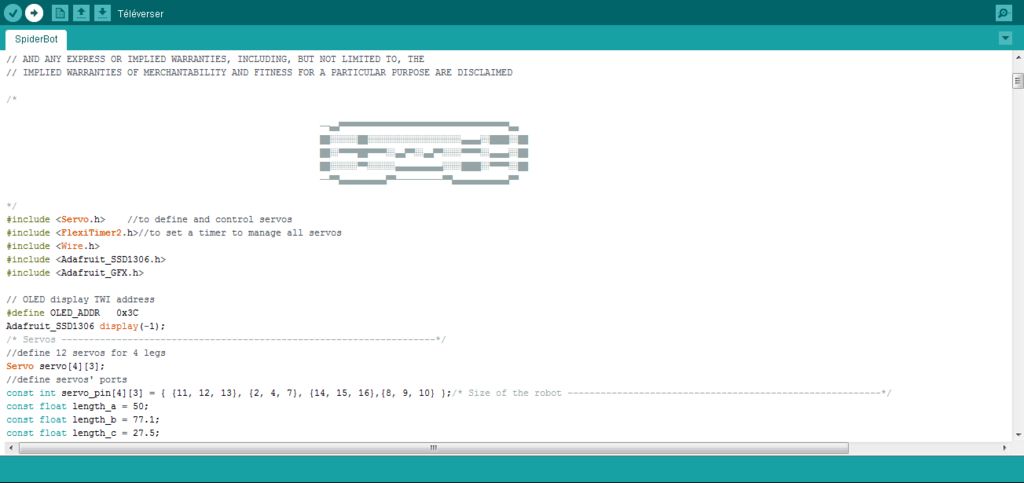
下一步,我們需要使用android應用上傳主程序來控制機器人。
上傳代碼后,我已連接OLED顯示屏以顯示我在主代碼中所做的Cozmo機器人笑容。
您可以在上面的圖片中看到伙計,該機器人遵循了我的智能手機發送的所有指令,并執行了一些其他改進以使其更加黃油。
-
Arduino
+關注
關注
188文章
6490瀏覽量
190041
發布評論請先 登錄





 工商網監
工商網監
評論