") 如何組裝無線PS2遙控器4WD機器人車載套件
如何組裝無線PS2遙控器4WD機器人車載套件

第1步:汽車底盤和組裝
您可以在該項目中使用任何機器人汽車底盤,只需更改硬件和程序即可根據(jù)您的機箱。我正在為此項目使用4WD機器人車載套件。
檢查隨附的視頻以學習組裝。
步驟2:組件
Arduino UNO
L298N電動機驅(qū)動器
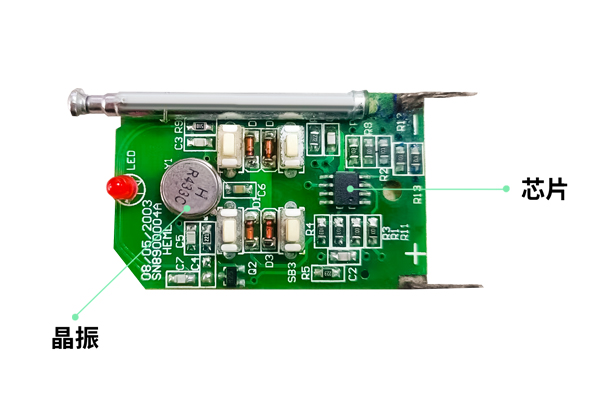
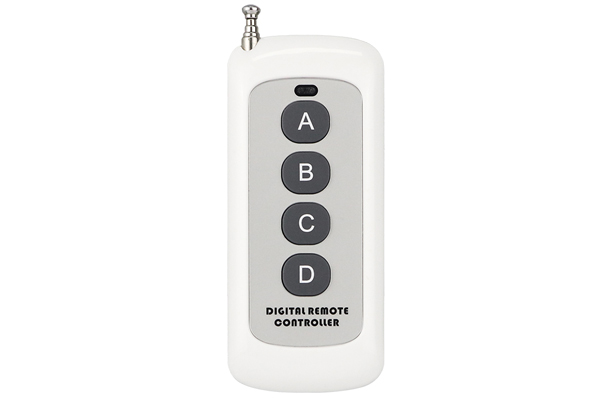
PS2無線遙控器和接收器
18650可充電3.7 V電池x 2
電池/電池座
跳線
為電池充電/保護目的,您可以添加其他組件
用于2S的BMS
用于3S的BMS
步驟3:硬件連接
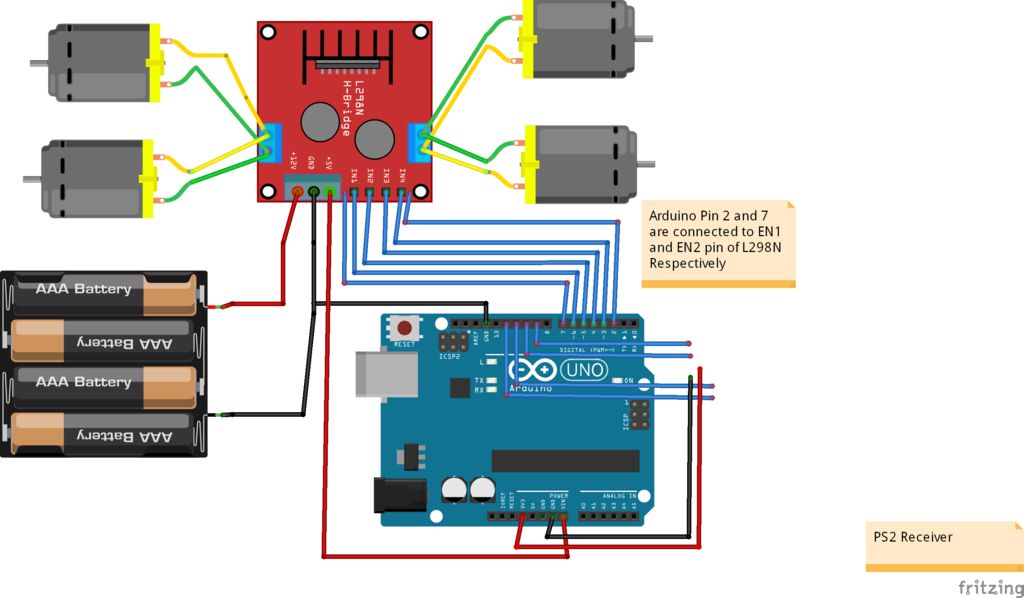

我還沒有找到PS2接收器的一部分,所以我從Arduino Pins上取了一些線,我將解釋它的連接,非常簡單。
如您所見所附圖片,我們使用PS2接收器(DATA,COMMAND,+ 3.3V,GND,ATTENTION,CLOCK)的6個引腳。
Arduino引腳------ ---------------- PS2接收器引腳
數(shù)據(jù)----------------------- ----------- Pin 12
命令-------------------------- Pin 11
+3.3V------------- --------------------- 3.3V Arduino引腳
GND ---------------- ------------------- GND
注意---------------------- --- Pin 10
CLOCK -------------------------------- Pin 9
第4步:編程部分
在您的Arduino IDE軟件中添加附帶的PS2控制器庫,然后將代碼上傳到Arduino開發(fā)板中。
步驟5:注意
請檢查隨附的視頻以及完整的過程。
您可以使用PS2遙控器上的兩個操縱桿來控制汽車,按L1使用左操縱桿,按R1使用右操縱桿。
調(diào)試
請確保兩個右側(cè)電機在同一運行中方向和左側(cè)電機也以相同方向運行。如果兩個電動機都不沿同一方向運行,請從側(cè)面更改任何一個電動機的極性。
如果向前推動操縱桿而汽車倒車,請更改電動機的極性,或者只需更改Arduino引腳。
責任編輯:wv
-
機器人
+關(guān)注
關(guān)注
213文章
29799瀏覽量
213283 -
遙控器
+關(guān)注
關(guān)注
18文章
857瀏覽量
68350 -
Arduino
+關(guān)注
關(guān)注
190文章
6499瀏覽量
192455
發(fā)布評論請先 登錄
工業(yè)機器人的特點
無線比例電機轉(zhuǎn)速遙控器的設(shè)計
索尼推出無線藍牙拍攝手柄GP-VPT3與遙控器RMT-VP2
盤點#機器人開發(fā)平臺
【「# ROS 2智能機器人開發(fā)實踐」閱讀體驗】+內(nèi)容初識
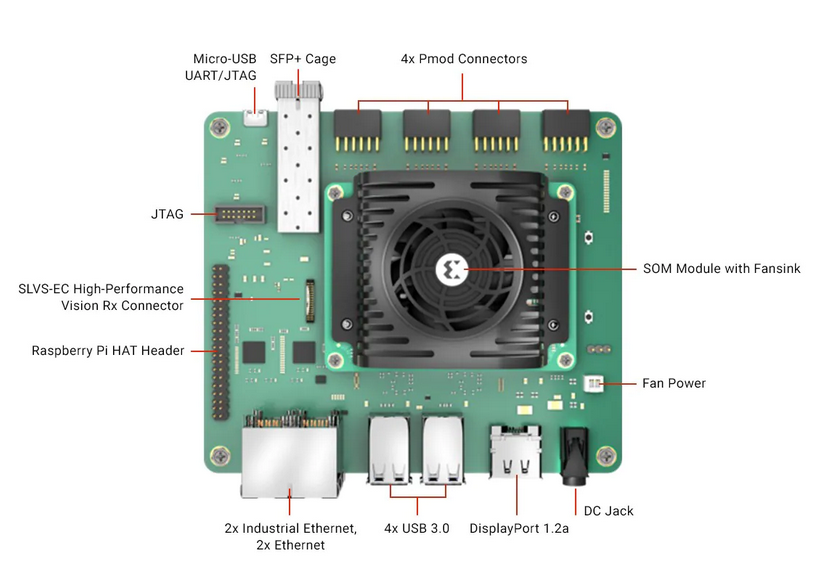
機器人開發(fā)套件 Kria KR260
名單公布!【書籍評測活動NO.58】ROS 2智能機器人開發(fā)實踐
開源項目!基于Arduino控制的六足機器人
技術(shù)再進化——工業(yè)遙控器技術(shù)要求更高
如何選購適合的拷貝遙控器——增配遙控器教程來啦
讓免費輕定制成為可能——增強型4鍵無線遙控器
帶電容式觸摸板的無線遙控器,使用MSP430F51x2






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論