 全自動機器人制作圖解
全自動機器人制作圖解

第1步:你需要什么
對于這個項目,你需要:
材料:
Arduino UNO x1
Motor Shield x1
面包板x1
直流電機x4
車輪x4
HC-SR04超聲波傳感器x1
9-V電池座x2
微伺服電機x1
9V電池x2
電工膠帶
電線
黑匣子x1
觸摸傳感器x1
工具:
熱膠槍
烙鐵
3-D打印機
螺絲刀
剪線鉗
步驟2:準備輪子
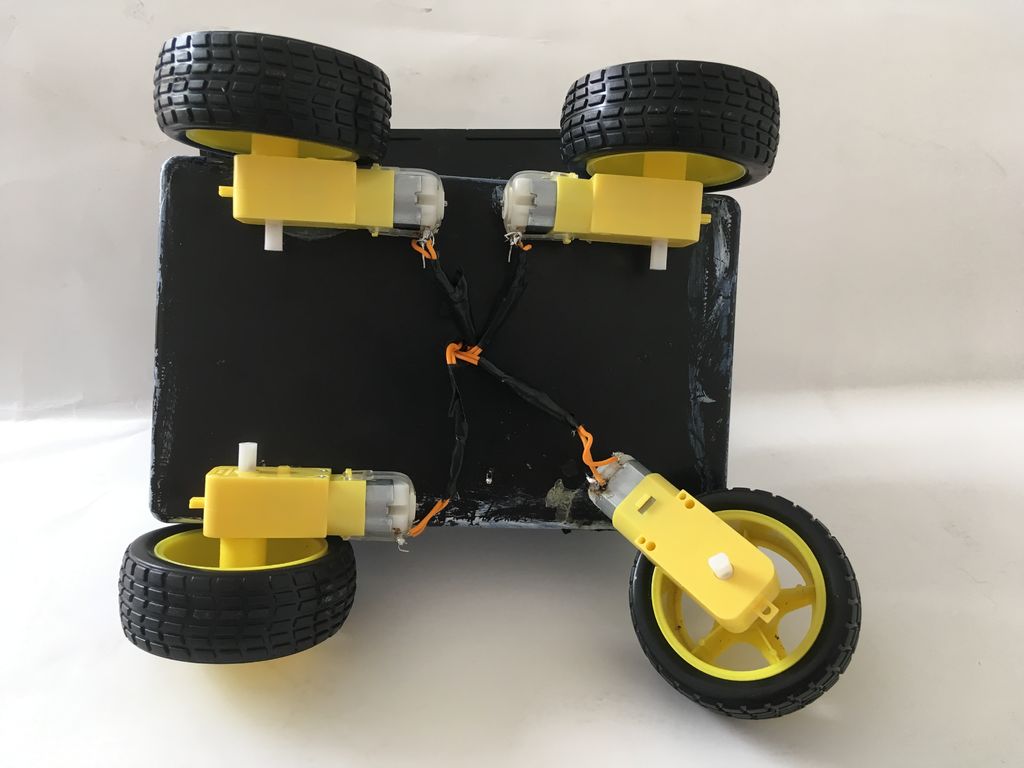

取兩根跳線,將一根穿過直流電機側面的銅制標簽。使用烙鐵,小心地將跳線焊接到直流電機。重復所有電機。
拿起滾輪并將其放在直流電機銅接頭另一側的白色銷上。車輪應保持緊密,并與直流電機一起自由旋轉。
要檢查車輪是否正常工作,請將每個直流電機上焊接的每根電線放在9 V電池的正極和負極端子上。輪子應該旋轉。
步驟3:準備3D打印組件
使用3-D打印機,打印以下.stl文件。如果需要改變設計,也包括零件文件。
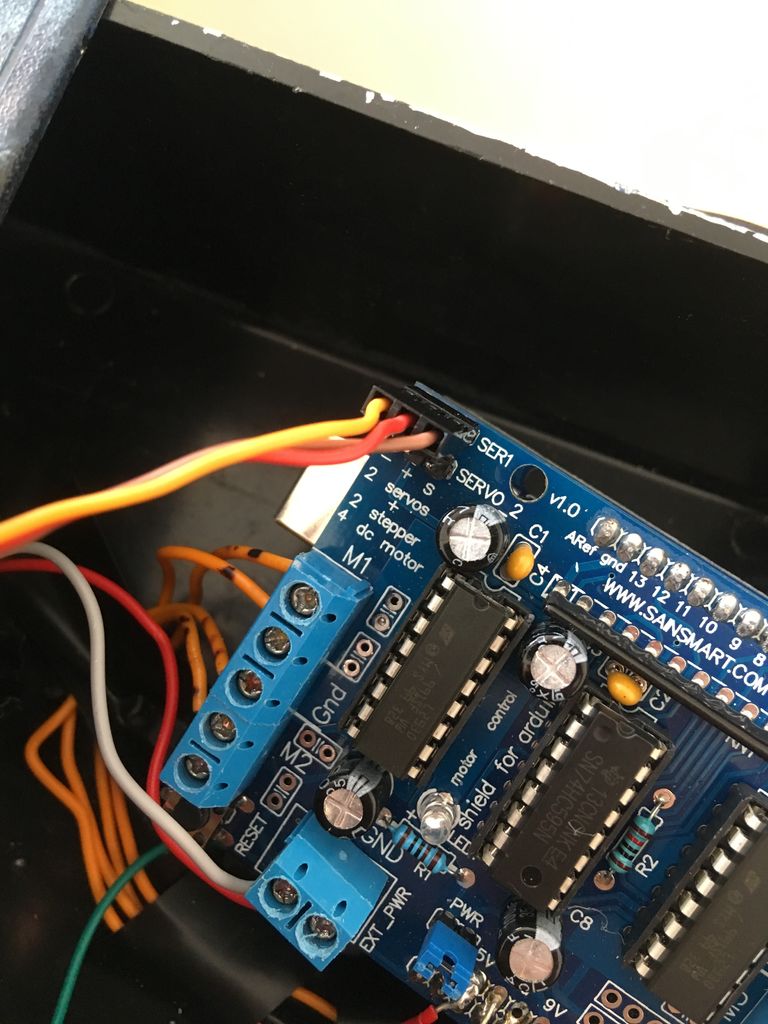
步驟4:設置電機屏蔽
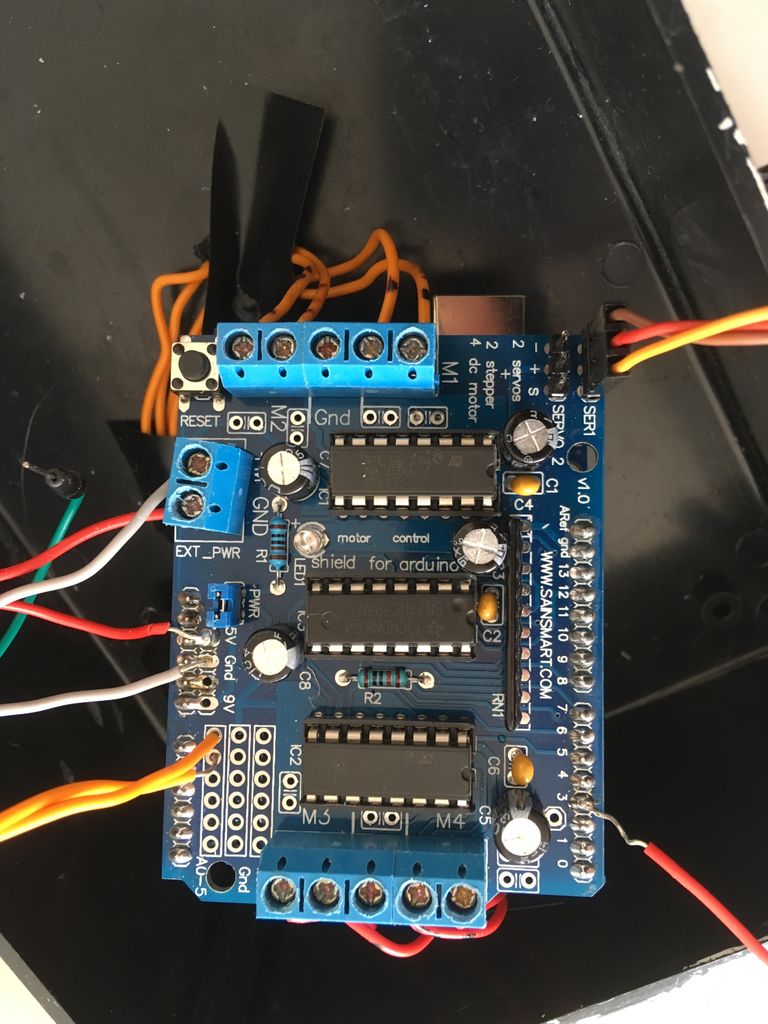

使用螺絲刀,我們將每根直流電機線連接到電機屏蔽上的M1 M2 M3和M4端口。
將控制左輪的電機連接到M1和M2端口,將右輪電機連接到M3和M4端口。
如果電機正在向后運行,只需切換該電機的電機屏蔽端口上的電線即可。 (基本上切換正負連接)。
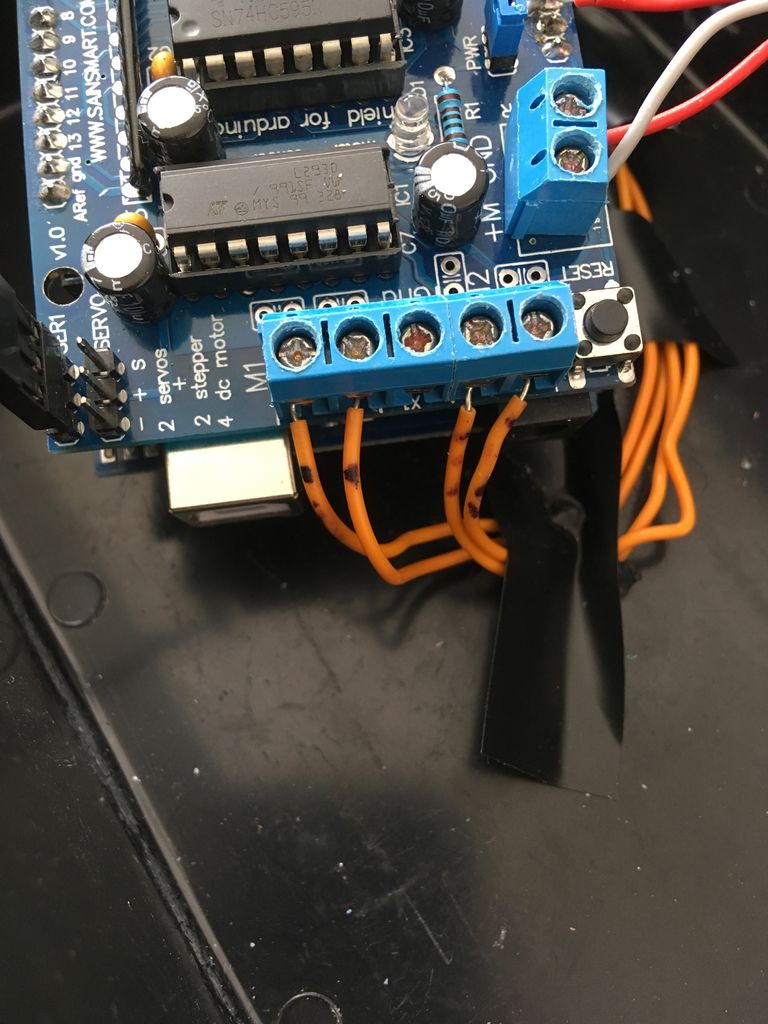
焊接長導線連接到電機屏蔽上的+ 5V,接地,A0,A1和引腳3。這些將用于在后續步驟中連接面包板,超聲波傳感器和觸摸傳感器。
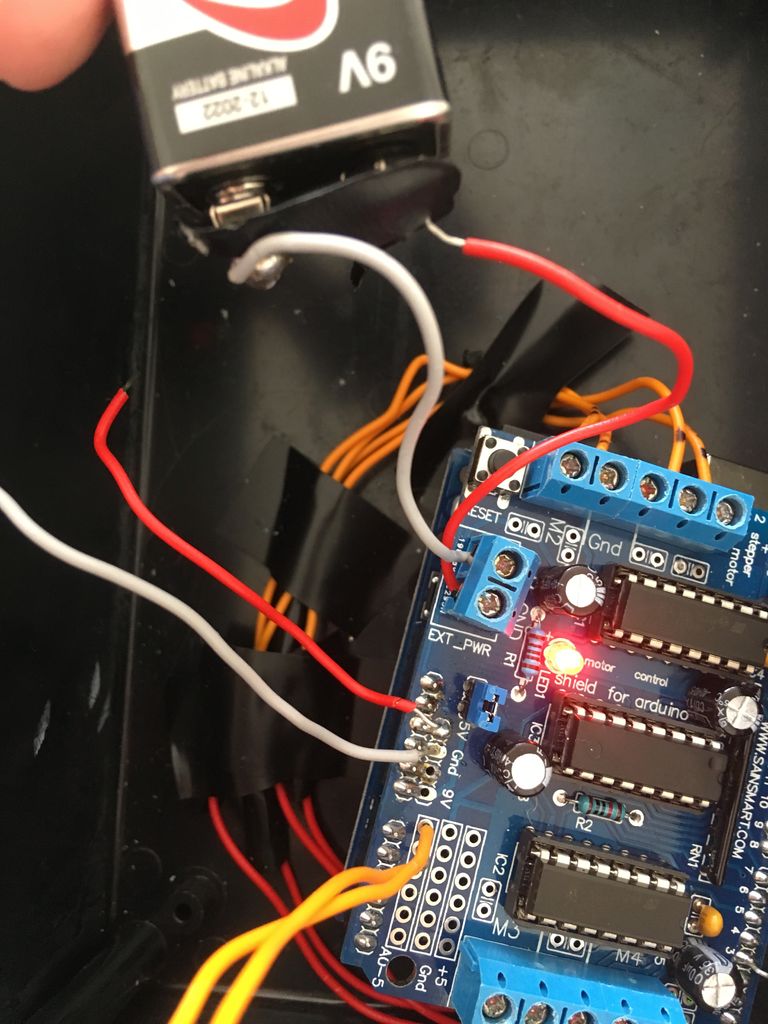
使用螺絲刀將電池座連接到電機護罩上的EXT_PWR端口。這將為電動機護罩和車輪提供動力。
將電機護罩放在Arduino上,確保端口正確對齊。
步驟5:連接面包板
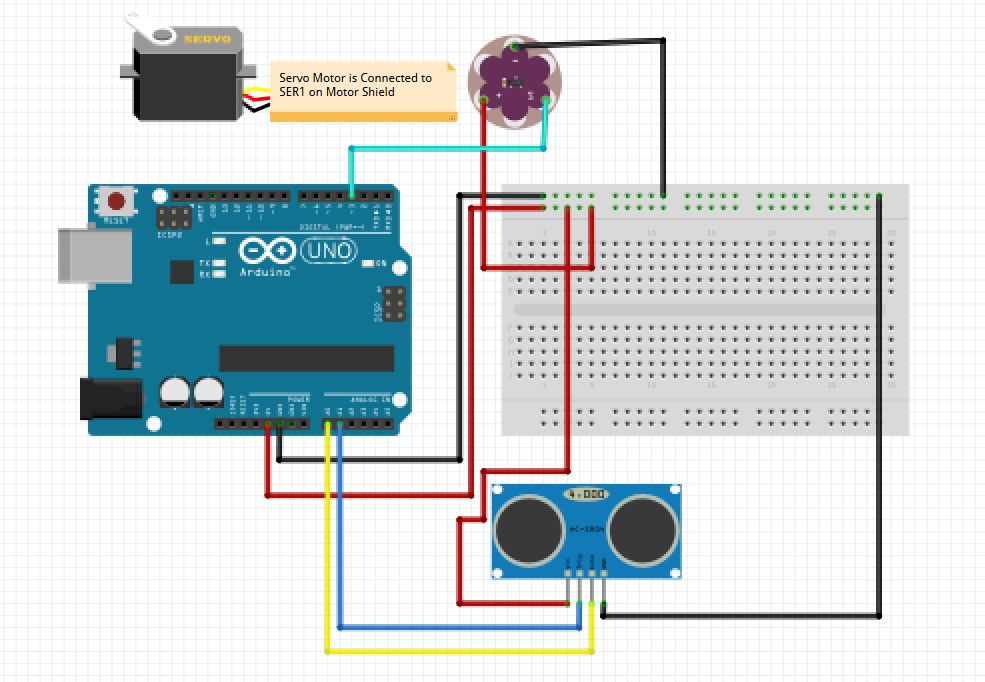
為簡單起見,大多數連接都焊接在電機屏蔽上。面包板主要用于提供+ 5V和接地連接。
在最后一步中使用焊接在電機屏蔽層上的電線,將+ 5V電線連接到面包板的紅色電源板,并將地線連接到面包板上的藍色電源板。
步驟6:設置HC-SR04超聲波傳感器
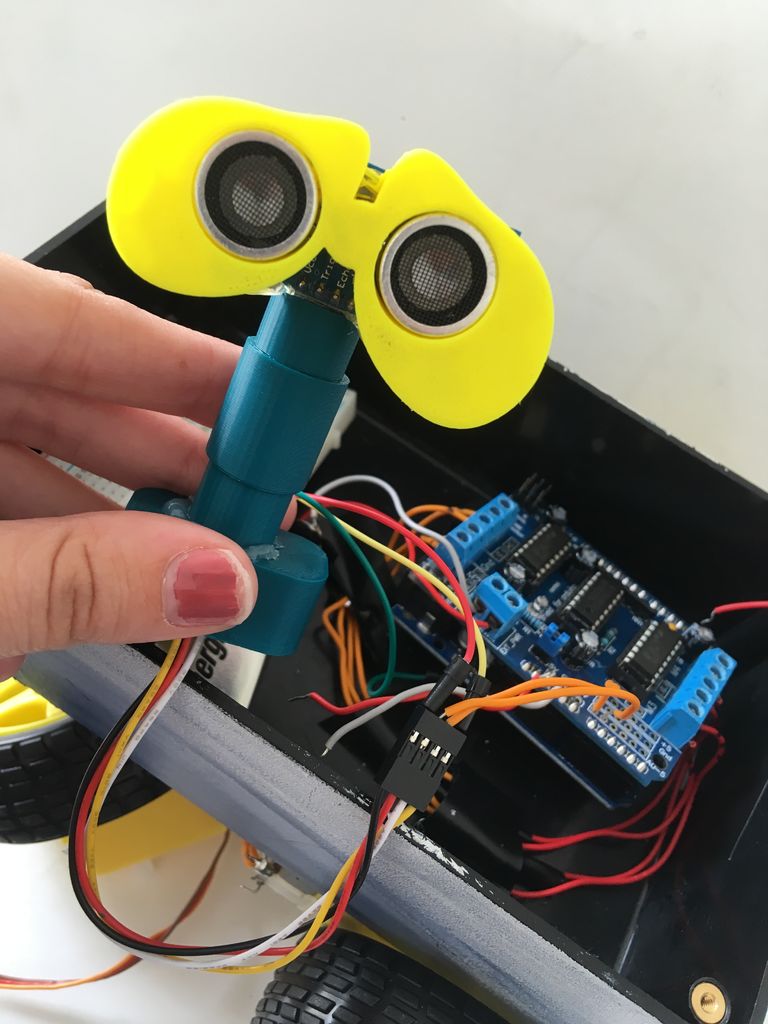
對于此部件,您將需要3-D打印部件從第3步開始!
將超聲波傳感器安裝到三維印刷超聲波傳感器支架部件中。將4根母對母跳線連接到超聲波傳感器背面的接地,觸發,回聲和VCC端口。將跳線穿過伺服安裝部件的內部并使用熱膠將伺服安裝部件連接到超聲波傳感器支架部件。
將步驟4中焊接到電機屏蔽層的電線連接到超聲波傳感器母對母連接的末端.TRIG應連接到A0,ECHO應連接到A1。從面包板上的紅色電源板到超聲波傳感器上的VCC端口以及從藍色電源板到GROUND端口的另一個連接進行連接。
用電工膠帶固定連接以確保它們不會松動。
步驟7:設置伺服電機
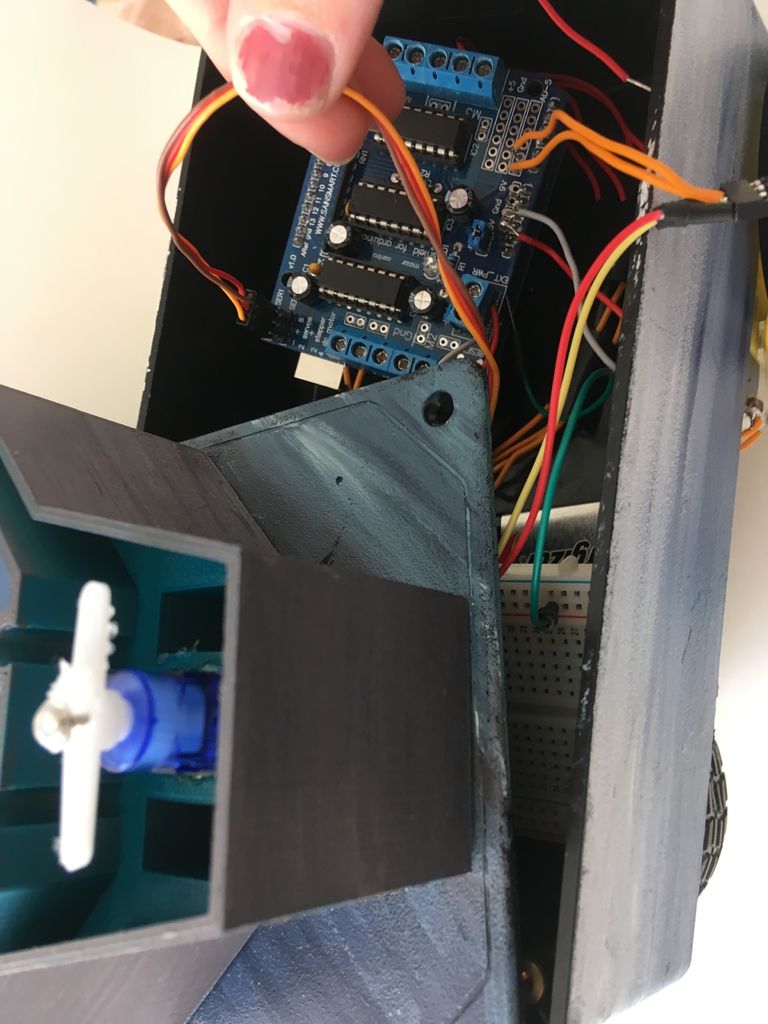
對于此步驟,您將需要Base 3-D打印部件。
將伺服電機安裝到底座3-D打印部件的中心開口(3個矩形開口的中間開口)上。通過開口運行伺服電線,并將伺服電機連接到電機屏蔽角上的SER1端口。
將上一步的超聲波膠片熱膠粘到伺服電機的頂部。
步驟8:設置觸摸傳感器
將3根母對母跳線連接到背面的G,V和S端口。觸摸傳感器。
將焊接在電機屏蔽引腳3上的電線連接到觸摸傳感器上的S端口。運行從面包板上的紅色電源板到超聲波傳感器上的VCC端口以及從藍色電源板到GROUND端口的另一個連接的連接。
步驟9:組裝Rob
加熱你的熱膠槍,它將在這一步驟中廣泛使用。當您等待熱膠槍加熱時,使用丙烯酸漆在Make Course中提供的黑盒子。等待它干燥。
一旦膠水變熱,將底座/超聲波傳感器部件粘在盒子頂部。將電線放在盒子內側。將電機護罩,Arduino和面包板放入盒子內。
將四個直流電機熱粘在盒子底部,確保連接到M1和M2的輪子在左側,連接到M3和M4的輪子在右側。此時,Rob應該完全減去代碼。
步驟10:代碼
為了運行提供的代碼,首先必須將AFmotor和NewPing文件下載到arduino庫中.r
下載FinalCode_4connect文件并將其上傳到您的arduino。
代碼設置的功能有助于在機器人出現障礙時更改機器人的路徑。當它檢測到障礙物時Rob停止,并向左和向右檢查并根據障礙物的位置調用前進,后退,轉向,轉彎和轉彎功能,以便他可以向正確的方向移動。當按下觸摸傳感器時,伺服開始測量其周圍,Rob向前移動直到他檢測到障礙物。當檢測到障礙物時,Rob停止并啟動changePath功能。
您的機器人現在應該跑步并避開障礙物!
-
機器人
+關注
關注
213文章
29709瀏覽量
212727
發布評論請先 登錄
輪式移動機器人電機驅動系統的研究與開發
盤點#機器人開發平臺
不畏嚴寒,全自動裝車機器人在吉林飼料廠安裝應用

貿澤電子開售ADI邊緣計算平臺,助力自動機器人機器視覺
信捷全自動裝車機器人在東北糧食廠安裝應用
全自動裝車機器人改變傳統的人工裝車模式

【「具身智能機器人系統」閱讀體驗】2.具身智能機器人的基礎模塊
移動機器人的技術突破和未來展望

智能移動機器人系統方案指南

開源項目!用ESP32做一個可愛的無用機器人
開源項目!用ESP32做一個可愛的無用機器人
智能移動機器人

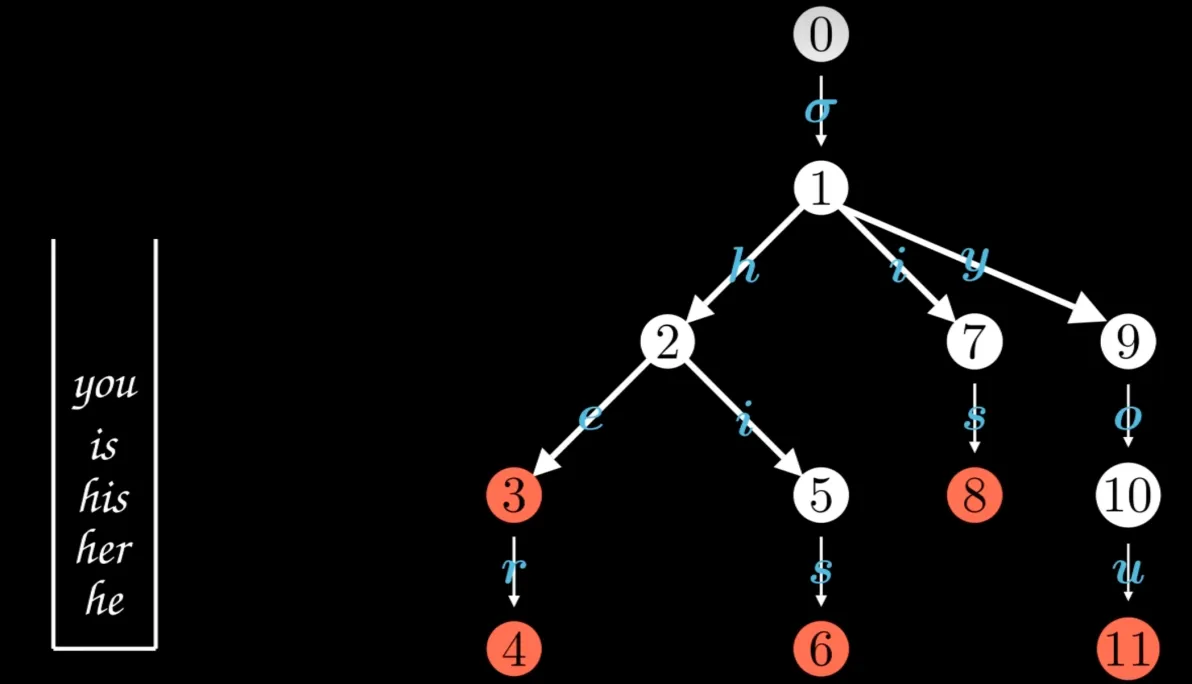
探索AC自動機:多關鍵詞搜索的原理與應用案例





 工商網監
工商網監
評論