 三類GPS測量技術的應用
三類GPS測量技術的應用
一、GPS簡介
GPS是一種通用的全球定位工具,已成為配給時間和頻率的基本系統。它由美國國防部控制、管理,至少由24顆衛星組成。GPS衛星發射的無線電在L 1和L 2(載頻)上傳送,其中L 1:1575.42 MH z;L 2:1227.60MH z。每個衛星傳送無線電擴大的頻譜波形叫做PRN碼(隨機噪聲碼),它位于L 1與L2之間,并能準確識別它發射的PRN碼。PRN碼一般分為C/A碼(粗嗎)和P碼(精碼),C/A碼的工作頻率為1.023Mbit/s;P碼的工作頻率為10.23Mbit/s。C/A碼位于無線電傳送L1波段,P碼位于位于無線電傳送L1與L2波段之間。將GPS接收機安裝在無線電通信系統中,用于校準和檢測實驗室。
每個GPS衛星上都裝載著銣原子或銫原子鐘,或者兩者都有。星載原子鐘提供無線電載波頻率和時間參考信號,并在USDOD(美國國防部)和UTC(協調世界時)參考指導下,由USNO(美國海軍天文臺)維護。其中USNO和NIST(美國國家標準技術研究院)與UTC保持共同一致,時間彼此同步在100ns,頻率在不同時刻之間誤差小于1x10-13。
用于時間和頻率測量中的GPS接收機,多數采用無線電C/A碼,以L1頻率作為時間和頻率參考,與八到十二顆星軌跡同步,提供觀察到的所有衛星信號的平均值。能通過RS-232或其它常用的接口,在計算機上提供一天的時間和清晰的數據信息,并且提供一個能容易的與UTC在100ns內同步的1PPS(每秒一個脈沖)脈沖信號和日歷。GPS接收機能產生5MHz或10MHz頻率輸出,有時也產生用于無線電的其它頻率,如1.544MHz或2.048MHz。其內部包括一個高精度的本地振蕩器,通常是一個溫補石英晶體振蕩器或銣振蕩器,GPS通過連續控制本地振蕩器與衛星上星載振蕩器保持一致,方便的進行頻率標準。
二GPS測量技術
在時間頻率計量學中,GPS測量技術通常被分為三類:單相、普通-觀測和載波—相位。單相GPS測量的不確定度較小,通常可以滿足任何校準或檢測實驗室。普通-觀測和載波—相位測量的程序較多,包括測試數據后處理程序,其測量不確定度更小,一般用在國際比對與計量實驗室。
三種GPS測量技術的比較表如下:
| GPS測量技術 | 時間不確定度(2σ/24h) | 頻率不確定度(2σ/24h) |
| 單相 | <20ns | <2x10-13 |
| 普通-觀測 | ≤10ns | ≤1x10-13 |
| 載波—相位 | <500ps | <5x10-15 |
1、單相GPS測量技術
單相GPS測量技術用于單臺鐘或振蕩器與GPS比較,通常應用在時間脈沖同步和頻率校準。校準時,直接從GPS接收機獲得作為校準的參考信號,用于絕對時間與不需要對測試結果后處理的地方。接收機在測試之前,必須完成數據采集,采集過程包括觀察天線位置。GPS時間頻率接收機的天線位置是固定的,觀察一次完成后不需要再計算定位位置。因此,時間頻率接收機通常存儲一個定位位置信號,以后接著使用相同的位置,多數接收機在開機時能夠自動的進行自檢。當完成一次信號采集,接收機輸出信號連接到測試系統。在時間同步測試時,接收機輸出的1PPS信號直接接到時間間隔計數器的輸入;在頻率測試時,GPS內振蕩器輸出的頻率信號(10MHz)可作為相位比較器的輸入,或作為頻率計數器的外時間基準。
由于GPS衛星傳播、調整的信號與UTC一致,因此,GPS接收機的長期準確性總是很好,C/A碼的特性變得也相當好。但是,美國政府為了限制其他國家把GPS信息用于高科技和國防上,故意在GPS信號上SA(選擇可用性)噪聲,以減弱其定位與時間的準確性。當SA設置為0時,GPS接收機的標準相位數據曲線如下:
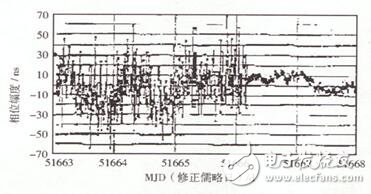
它顯示的是10min的平均值數據,將單相GPS接收機輸出的1PPS與UTC(NIST)通過時間間隔計數器進行比較。由相位曲線可以看出,每天測試的相位幅度相近。當平均周期為一天或更長的時間時,其穩定性與準確性總是很好,信號相位噪聲限制短期穩定性,其阿倫方差圖如下:
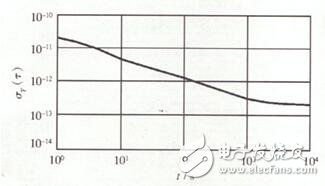
表明接收機的穩定度接近1x10-13/d,平均相位噪聲穩定度連續降至10-14量級,相位噪聲限制接收機短期穩定度1s時在10-9量級。如果選定從GPS內振蕩器獲得分布頻率,或用它作為一個測量系統的參考,即可得到所需要的短期穩定性。GPS內振蕩器幾乎能校準任何頻率標準的長期穩定度(取樣時間為一天或更長時間),但通常不適用測量其中、短期穩定度(取樣時間小于1000s)。
2、普通-觀測GPS測量技術
普通-觀測型是GPS測量技術中一種簡便、精巧的方法,它用于同一地方的兩臺鐘或不同地方的本地振蕩器相互比較,已長期被用作國際時間與頻率標準比對。TAI(國際原子時)與UTC是由約50個實驗室200多個本地原子鐘的平均數據收集產生,這些數據多數用于一般的GPS測量。一旦數據被傳送到BIPM(國際計量局),TAI與UTC的穩定度為10-15。
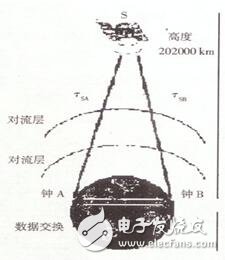
以上顯示的是普通-觀測型GPS的工作過程。GPS衛星發射機(S)發射的信號作為參考信號,兩臺鐘或振蕩器(A與B)現對于兩臺GPS接收機比較測量。這個衛星與兩臺接收機之間以普通-觀測型出現,二者同步接收S發射的信號,各個接收機與它本地鐘接收到的信號或數據記錄比較。接收機A接收的信號通過τSA通道與本地參考鐘(S-鐘A)比較;接收機B接收的信號通過τSB通道與本地參考鐘(S-鐘B)比較;然后兩臺接收機互換,接收的數據不同。從兩個通道來的誤差通常被抵消,包括衛星鐘上的性能,最后的測量結果是(鐘A-鐘B)-(τSA-τSB)。
普通-觀測GPS測量技術能完全地將轉換為兩者接收機位置所共有的測量誤差相互抵消,這些誤差包括天體位置推算表誤差;電離層傳播與對流層中斷校準誤差;接收機坐標誤差;以及接收衛星信號時通道的變化、接收中斷的變化、溫度變化等所產生的誤差。為了獲得最好的測量結果,要求使用相同的接收設備且天線在相同的位置,并盡可能準確地觀察天線的位置。當在同一大陸的兩個站之間使用時,普通-觀測GPS測量技術的時間不確定度(2σ)將小于10s/d,其頻率不確定度是1x10-13。其穩定度大約每天為1x10-13,每周接近1x10-14。
3、載波—相位GPS測量技術
載波—相位GPS測量技術主要用于頻率傳遞,由L1與L2載波頻率代替衛星發射的時間碼。其重要標志是載波—相位測量能使單通道測量用于絕對時間或普通-觀測測量傳遞過程。載波-相位技術擴展到收集數據的傳遞過程,并且不需要每天測量,能盡可能地減少測量不確定度,因此,其主要用于原子頻率標準與國際比對中。
在采用載波-相位測量技術進行的國際比對中,從接收機獲取的信號與從地方的主要頻率標準獲取的信號比較,在測量結果之前交換彼此實驗數據。理論上,每個地點比對僅需要一臺接收機。可是,由于大氣壓的延遲與劃分國家基準線有很大不同,接收機網用于改善測量結果。各個接收機收集數據用于幫助解決周期模糊問題,比對在NIST與PTB(德國物理技術研究所)之間進行。在德國,通常一個網絡采用6臺接收機,每臺接收機位于各自實驗室,一臺接收機位于相鄰的實驗室,并且,兩臺位于基準線中間的兩個實驗室。一些載波-相位網絡規模更大,可以包括近100臺接收機。
從地球動力學IGS(國際GPS服務站)獲得準確的軌跡信息和計算參數,收集詳細的電離層與大氣壓數據,通過專門的軟件分析包進行簡單的數據分析處理。從載波-相位公式可以看出需要確定的參數,軟件分析包能夠對許多參數進行估算,但周期跳變與氣壓延遲參數的值是最難確定的。
-
gps
+關注
關注
22文章
2965瀏覽量
168507 -
無線電
+關注
關注
60文章
2162瀏覽量
117657
發布評論請先 登錄

盤點3d打印的三類常用耗材
三類表面貼裝方法
智能設備三類應用的供電問題分析
三類小米音響的優點與缺點
第三類存儲技術為存儲行業帶來了一次技術飛躍
AI三類醫療器械和人工智能有直接的關系嗎
國內儲能市場中主要的三類玩家





 工商網監
工商網監
評論