") 如何制作超聲波雷達(dá)
如何制作超聲波雷達(dá)

步驟1:接線圖
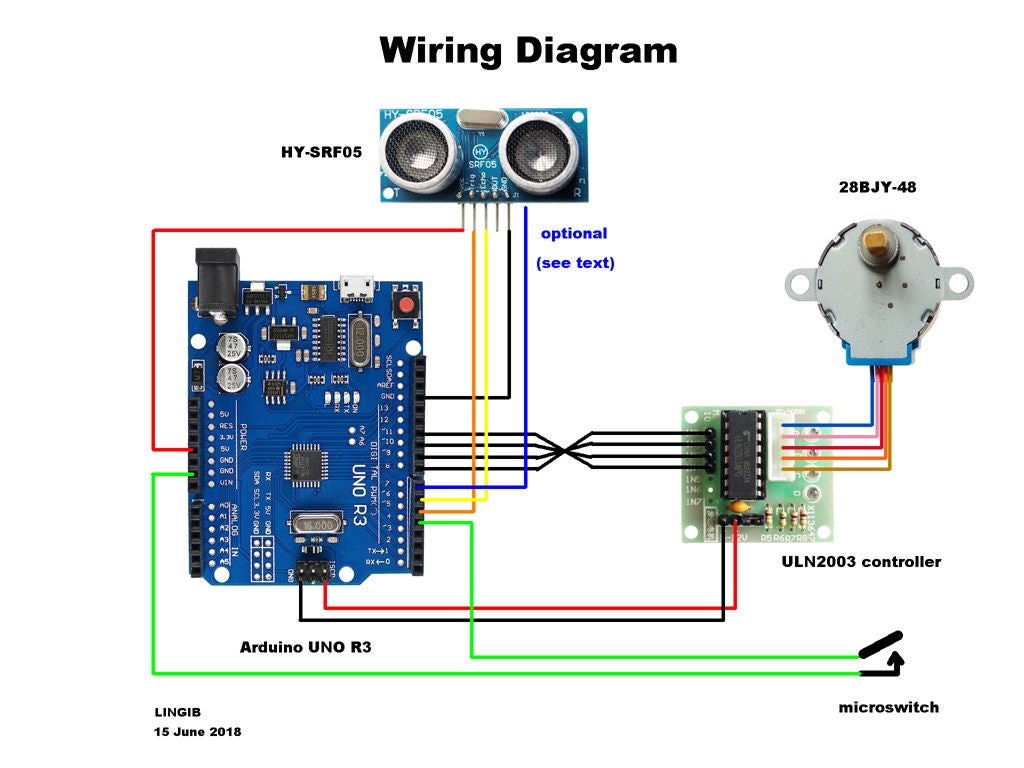
接線圖顯示在photo1中。
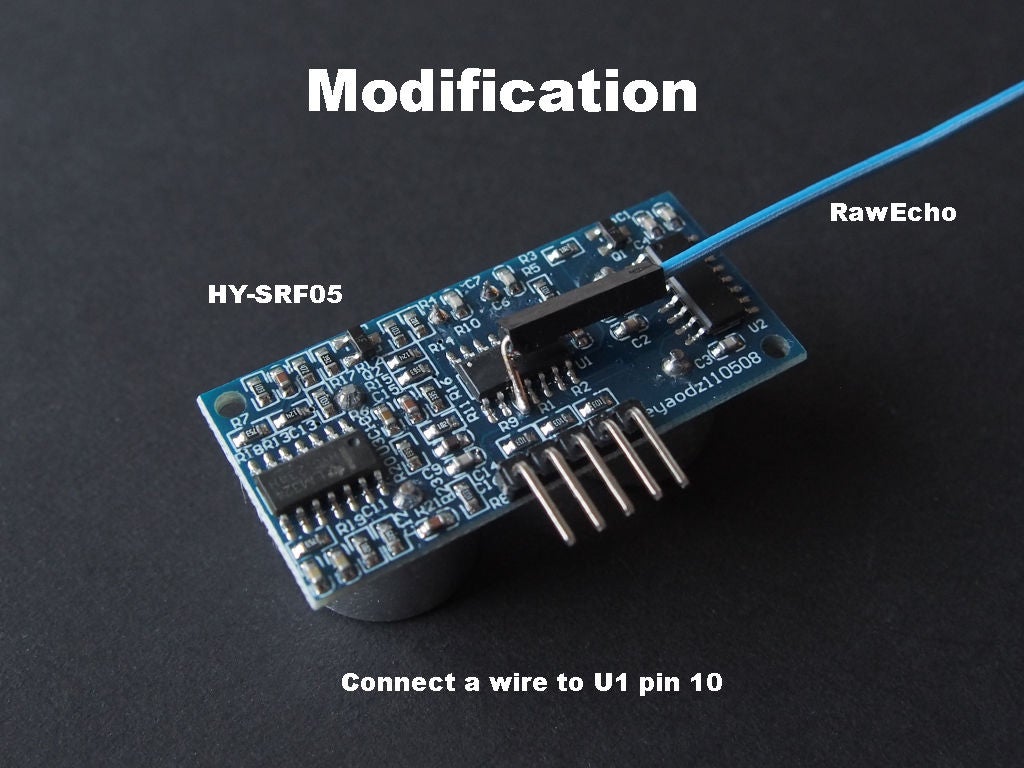
照片2中顯示了可選的修改。此修改是HC-SR04和HY-SRF05超聲波傳感器的相同,并允許檢測(cè)多個(gè)回波。
如果您有HC-SR04,焊接電線的集成電路標(biāo)記為U2
步驟2:零件清單
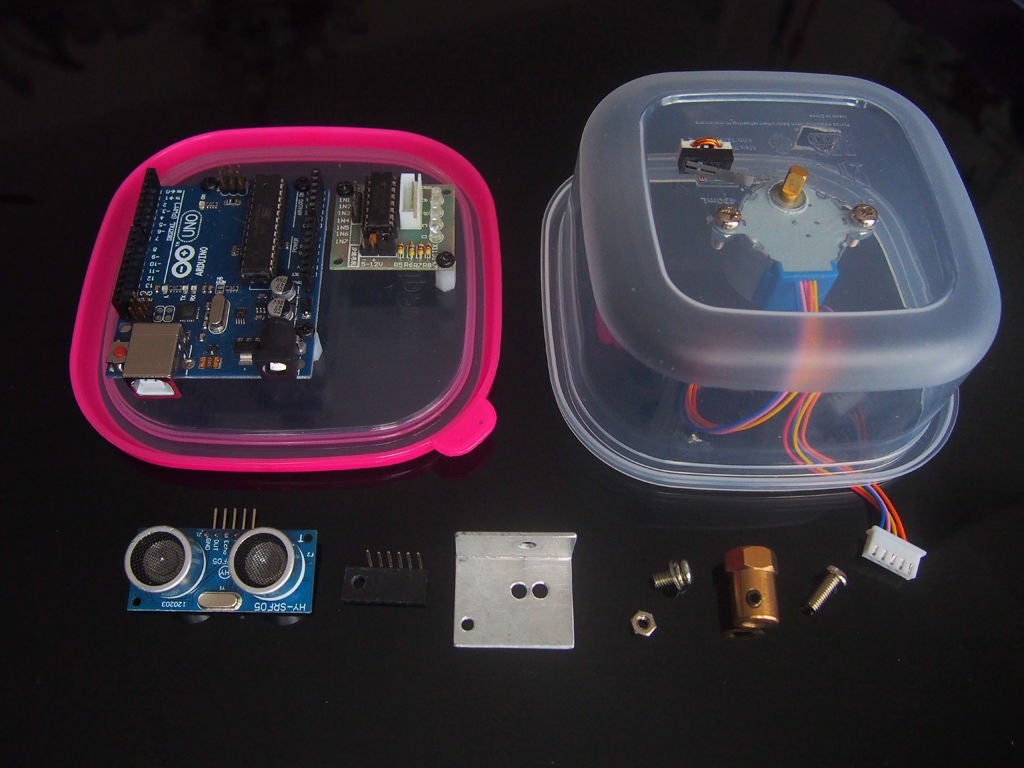
以下部分是在當(dāng)?shù)孬@得的:
1只有塑料食品容器。
1只有超小型微動(dòng)開關(guān)。
1只有公頭條(用于連接傳感器的電線)。
1只母頭條(用于安裝傳感器)。
1只20規(guī)格鋁(廢料)板材40mm x 55mm。
6只9mm尼龍墊片輕敲3mm。
僅3根電纜扎帶。
13只3mm x 6毫米螺栓。
1只3mm螺母。
4只有4mm x 10mm螺栓。
2只有4mm螺母。
1只有28BJY-48 5伏步進(jìn)電機(jī)compl與ULN2003控制器一起使用。
1只用于模型車的5mm內(nèi)徑黃銅六角軸到車輪耦合器。
1只有HY-SRF05(或HC-SRF04)超聲波傳感器。
第3步:工作原理
所有零件都裝在塑料內(nèi)食品容器。通過USB端口獲得電源。
該電路包括Arduino,超聲波傳感器,步進(jìn)電機(jī)和微動(dòng)開關(guān),用于將傳感器移動(dòng)到其家中。位置。微動(dòng)開關(guān)是必要的,因?yàn)樗?4:1內(nèi)部傳動(dòng)裝置無法用手旋轉(zhuǎn)步進(jìn)電機(jī)。
當(dāng)首次通電時(shí),Arduino將傳感器旋轉(zhuǎn)到其“原位”位置,由微動(dòng)開關(guān)確定,然后“輪詢”顯示器直到它得到響應(yīng)。
28BJY-48步進(jìn)電機(jī)的“步幅”為5.625/64度,這意味著無法進(jìn)行1度步進(jìn)(即使我們的刻度標(biāo)記為0..180度)。
幸運(yùn)的是,180/stride-angle = 180 * 64/5.625 = 2048,它可以被8整除。如果我們從0..2048增加一個(gè)數(shù)字并除以8,那么我們得到256次剩余零。..我們只需在余數(shù)為零時(shí)發(fā)送“ping”。這相當(dāng)于每個(gè)PI/256弧度或0.703125度的“ping”。
軟件[1]
然后顯示屏接受控制并不斷詢問Arduino提供以下數(shù)據(jù):
方位角
距離1
距離2
方向
然后在屏幕上顯示每個(gè)“方位角”的“距離”。 “方向”信息用于創(chuàng)建“光束”在旋轉(zhuǎn)時(shí)出現(xiàn)的“點(diǎn)”錯(cuò)覺。
只要數(shù)據(jù)發(fā)送到顯示器,Arduino就會(huì)自動(dòng)移動(dòng)到下一個(gè)“ping”位置。
[1]
用于編寫顯示的“Processing 3”軟件可以從https://processing.org/download/下載
Processing 3支持2D和3D圖形,與Arduino IDE(集成開發(fā)環(huán)境)非常相似。主要的視覺差異是代碼運(yùn)行時(shí)的“圖形窗口”和使用“draw()”函數(shù)而不是Arduino“l(fā)oop()”。
步驟4:顯示器
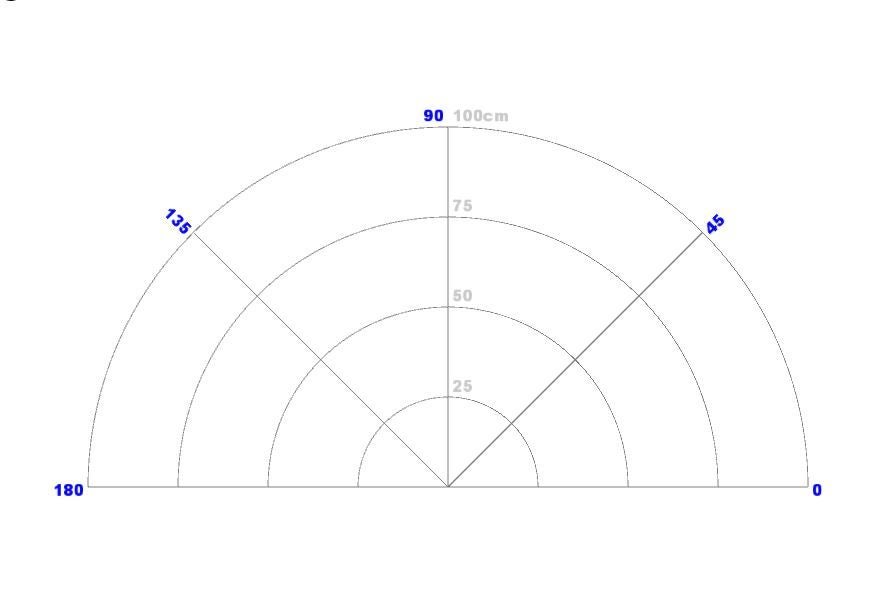
The Graticule
我選擇創(chuàng)建180度圖形顯示,因?yàn)樗峁┝艘粋€(gè)“雷達(dá)陰影”,可以在試驗(yàn)時(shí)站立。如果我想使用一個(gè),這種顯示器也與伺服電機(jī)兼容。通過調(diào)整代碼可以獲得完整的360度顯示。
以下照片說明了如何創(chuàng)建經(jīng)緯網(wǎng):
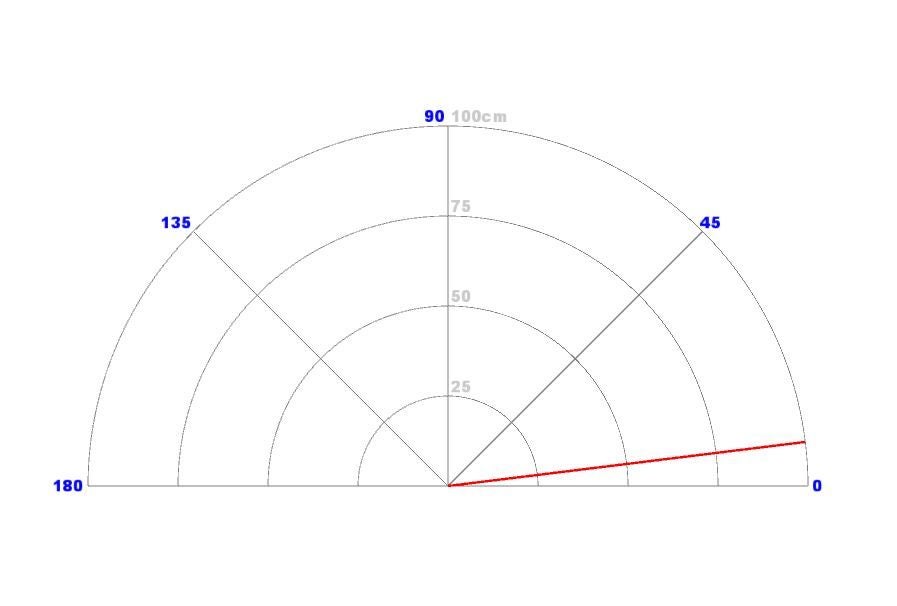
照片1
經(jīng)緯網(wǎng)包含許多“弧線”和“線”。這張照片中顯示了有角度的標(biāo)簽,但之后被放棄了,更傾向于水平文字,更容易閱讀。
照片2
顯示紅線描繪“梁”。標(biāo)簽中的文字現(xiàn)在是水平的。
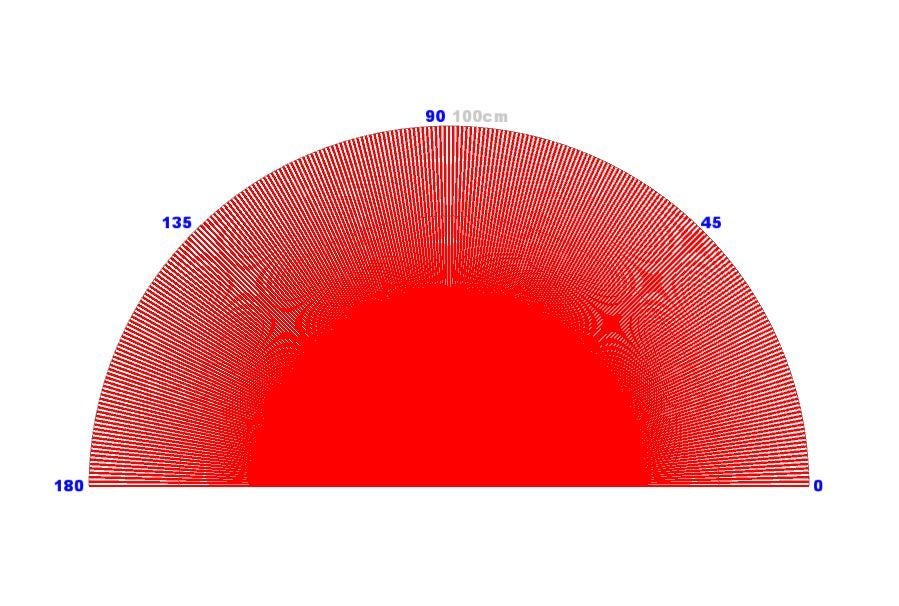
照片3
照片2中的紅線已經(jīng)旋轉(zhuǎn)了0..180度到256個(gè)方位角。在該照片中,由于光束寬度太窄,因此不會(huì)覆蓋網(wǎng)格的外部部分。這會(huì)產(chǎn)生一些奇怪的瑕疵。
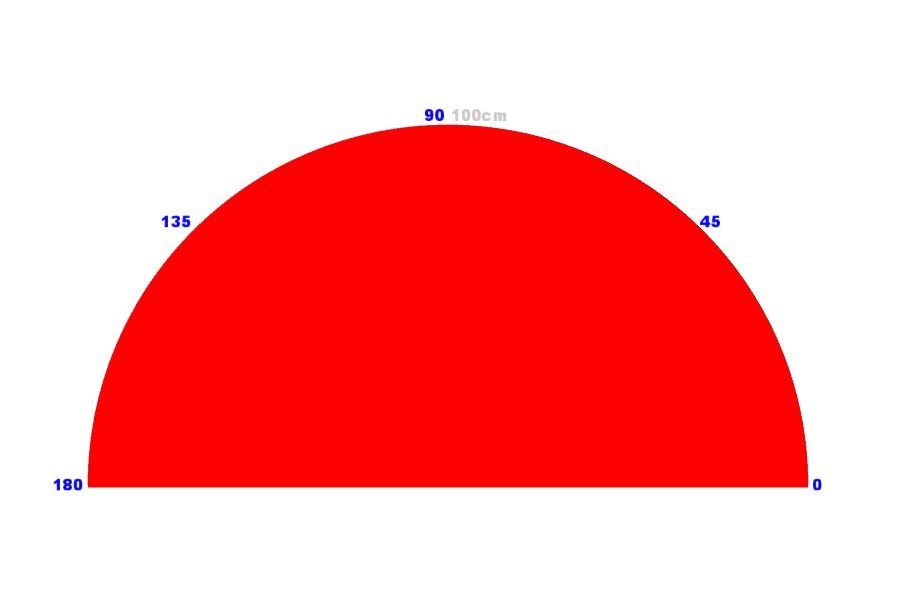
Photo 4
增加光束寬度可以消除這些瑕疵。
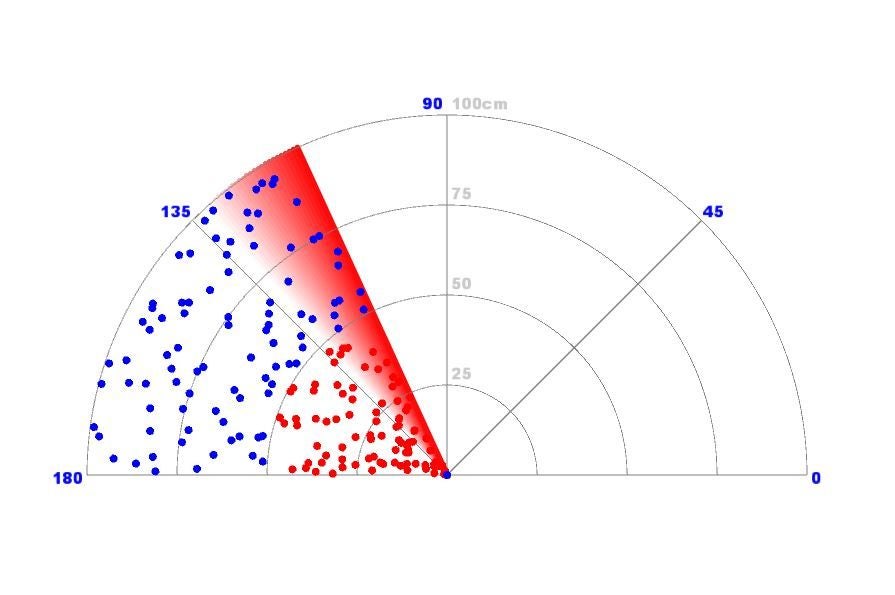
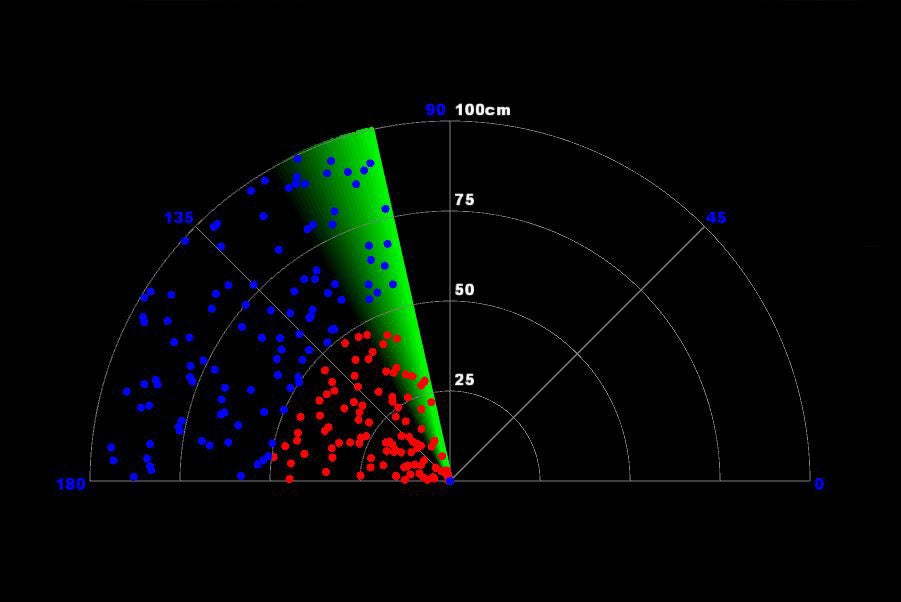
照片5
引入了隨機(jī)點(diǎn)來表示主要(紅色)和次要(藍(lán)色)回聲。可以更改的范圍設(shè)置為100cm以匹配顯示。還引入了衰落光束圖案。用于創(chuàng)建這種“褪色光束”的技術(shù)將在下文進(jìn)一步解釋。
Photo 6
配色方案已經(jīng)改變,增添了一絲真實(shí)感。
動(dòng)畫
圖形顯示的動(dòng)畫部分使用3D圖形來大大簡(jiǎn)化代碼。為了理解這是如何可能的,讓我們從(0,0)的XY起始坐標(biāo)繪制一個(gè)恒定半徑的“30度線”。
2D圖形需要使用sin(30)和cos(30)來計(jì)算線的XY端坐標(biāo):
X=cos(30)*radius = 0.866*radius
Y=sin(30)*radius = 0.5*radius
line(0,0,X,Y);
3D圖形不需要使用三角學(xué)。我們只需圍繞Z軸旋轉(zhuǎn)XY網(wǎng)格坐標(biāo),然后繪制一條水平線。
pushMatrix(); //preserve our current grid coordinates
rotateZ(radians(30)); //rotate our XY grid coordinates about the Z-axis
line(0,0,radius,0); //draw a “horizontal” line on the rotated grid
popMatrix(); //restore our grid coordinates
無論哪種方式都有效,但第二種方法適用于& #8220;平” PI/256弧度的間隔。
褪色線
光束有自己的虛擬屏幕。在繪制任何一行之前,“ alpha”所有先前行的(不透明度)減少了一小部分。最終,最早的線條變得無形,給人一種褪色的幻想和“粉絲”。
每當(dāng)刷新顯示時(shí),此虛擬屏幕(從不擦除)將與主屏幕的內(nèi)容合并。
步驟5:安裝支架
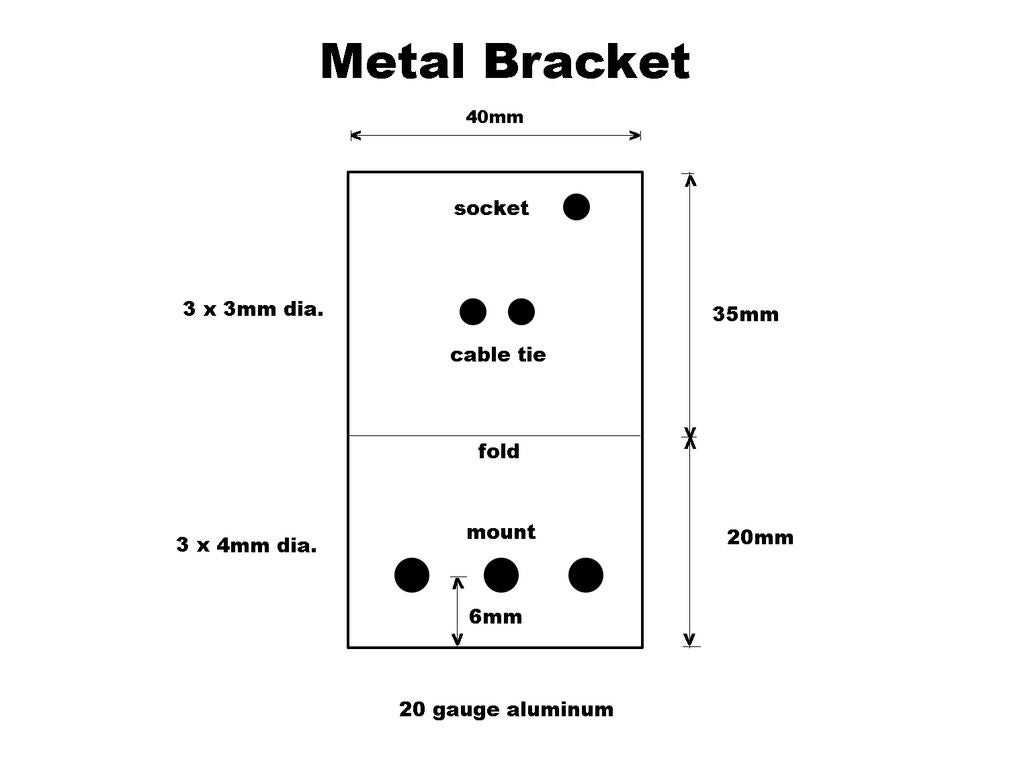
合適安裝支架的鉆孔模板如圖1所示。
定位兩個(gè)外部“安裝&# 8221;傳輸(T)和接收(R)傳感器下方的孔。我發(fā)現(xiàn)如果傳感器圍繞接收(R)傳感器而不是兩個(gè)傳感器之間的中間旋轉(zhuǎn),則獲得最佳結(jié)果。
第6步:匯編
USB電纜孔
請(qǐng)勿嘗試為USB鉆孔電纜孔連接器雖然塑料容器的側(cè)面作為塑料傾向于分裂和芯片。相反,使用熱烙鐵的尖端熔化孔,然后用鋒利的刀修剪。注意不要吸入煙霧。
軸伸展器
更換其中一個(gè)4mm“平頭螺釘”在帶有4mm x 10mm螺栓的軸伸擴(kuò)展器中。該螺栓用于激活微動(dòng)開關(guān)。
微動(dòng)開關(guān)
定位微動(dòng)開關(guān),使其在4mm螺栓上被激活軸沿順時(shí)針方向旋轉(zhuǎn)。
我用兩匝20規(guī)格的銅線將微動(dòng)開關(guān)連接到外殼上,因?yàn)闆]有現(xiàn)成的2mm螺母和螺栓。
剩余組件
布局并不重要。電機(jī)軸位于中央。 Arduino和電機(jī)控制器安裝在尼龍墊片上,可以將電線夾在下面。
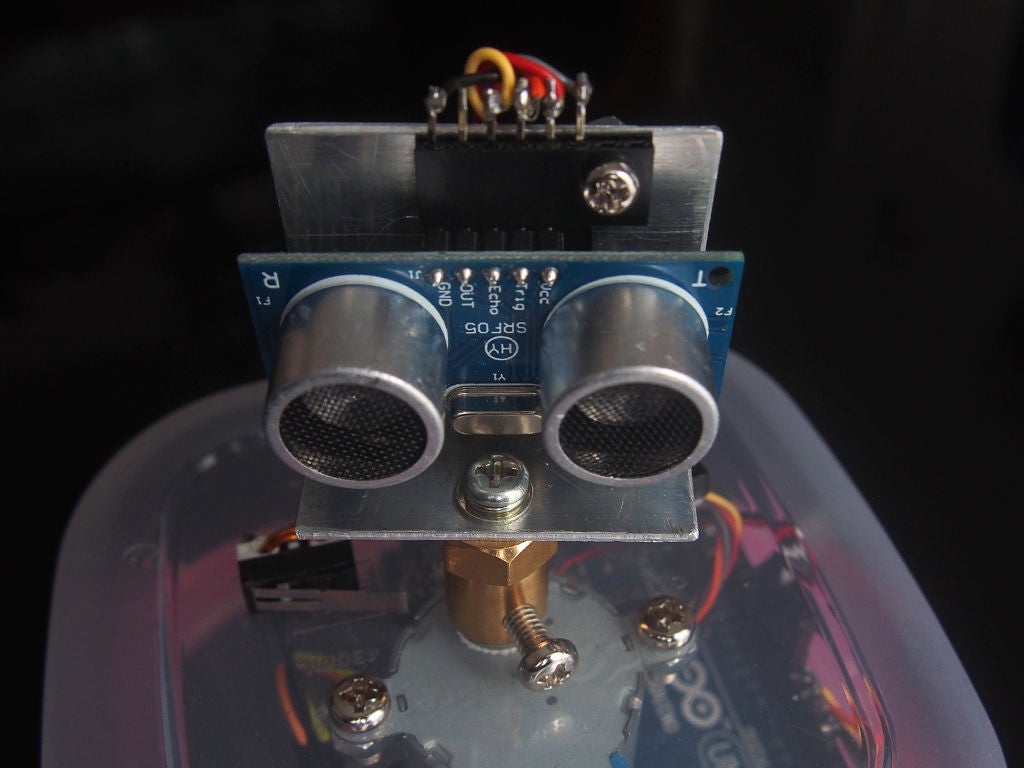
安裝傳感器
照片1
顯示傳感器組件。 HY-SR0F-5插座采用母頭插座設(shè)計(jì)。所有不需要的銷釘都已拆除,并在塑料上鉆了3毫米的孔。然后通過3mm螺母和螺栓將割臺(tái)連接到支架上。
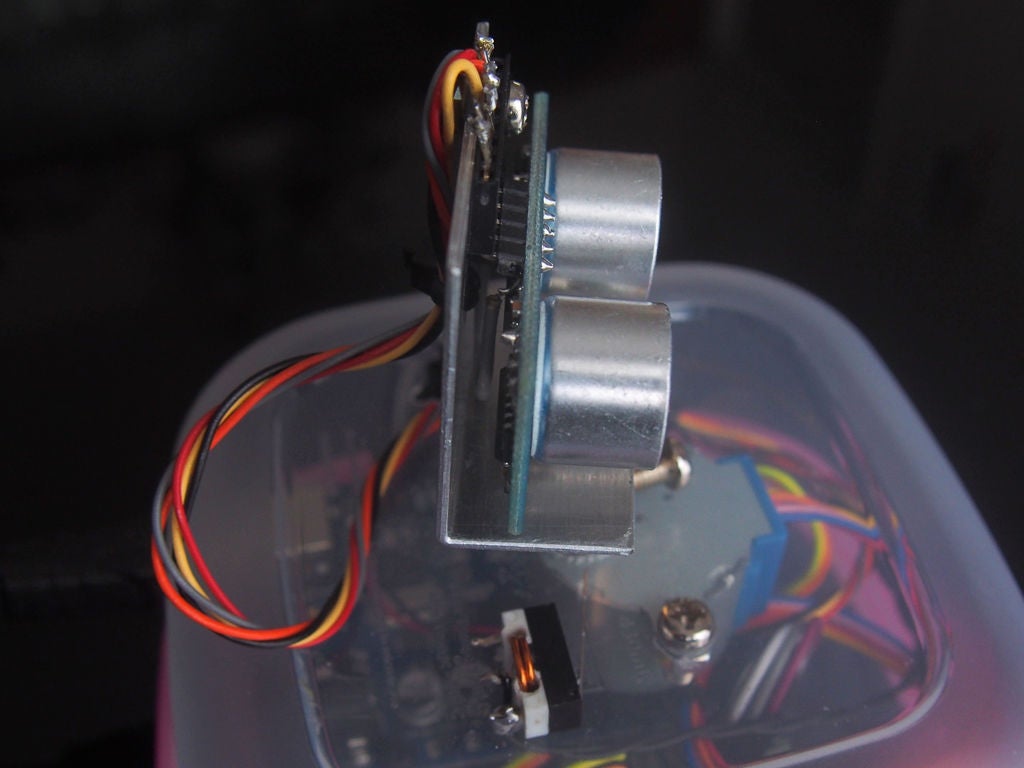
Photo 2
顯示傳感器組件的側(cè)視圖。頭部的電線與支架電纜連接。這“消除壓力”傳感器旋轉(zhuǎn)時(shí)可防止不必要的電纜移動(dòng)還要注意“灰”導(dǎo)線連接到IC1的引腳10。這根電線是可選的,可將二次回波饋送到Arduino。
上電后微動(dòng)開關(guān)操作后,將傳感器組件安裝到軸延長(zhǎng)器上。然后軸在其家中”位置。
步驟7:軟件安裝
按此順序安裝以下代碼:
Arduino IDE
處理3
聲學(xué)雷達(dá)發(fā)送器下載并安裝處理3 [1]
將附件的內(nèi)容“ acoustic_radar_sender_2.ino”復(fù)制到Arduino“ sketch”,保存,然后將其上傳到您的Arduino Uno R3。
關(guān)閉Ardino IDE,但保持USB電纜連接。
聲雷達(dá)接收器
復(fù)制附件的內(nèi)容, #&8220; acoustic_radar_receiver.pde”處理“草圖”。
修正
[1]
“acoustic_radar_sender_2.ino”修復(fù)“acoustic_radar_sender_1.ino”中的“scan-creep”錯(cuò)誤。感謝https://www.instructables.com/member/newtoeu/instr 。..指出來。
第8步:測(cè)試
單擊左上角“運(yùn)行”處理窗口中的按鈕,您的項(xiàng)目將會(huì)突然變?yōu)楝F(xiàn)實(shí)。
嘗試檢測(cè)不同的物體:
附近的物體要求發(fā)射(T)傳感器較低,以防止“光束”通過頂部。
更遠(yuǎn)的物體需要更大的表面積,因?yàn)殡S著光束的擴(kuò)散,聲能損失很多。..。..加上回波也會(huì)擴(kuò)散。
試驗(yàn)三個(gè)安裝孔。
您可能希望嘗試垂直安裝傳感器,以便發(fā)送和接收波束寬度重疊。
-
超聲波雷達(dá)
+關(guān)注
關(guān)注
1文章
73瀏覽量
4571
發(fā)布評(píng)論請(qǐng)先 登錄
超聲波測(cè)距換能器:工業(yè)與生活中的測(cè)量利器
超聲波清洗機(jī)是什么,它如何通過超聲波振動(dòng)來清洗物品?

超聲波換能器:原理與多領(lǐng)域應(yīng)用解析
超聲波清洗的原理是什么?超聲波清洗是如何起作用的?

超聲波頻率和功率對(duì)在線式超聲波清洗的影響如何?

毫米波雷達(dá)與超聲波雷達(dá)的區(qū)別
雷達(dá)液位計(jì)和超聲波液位計(jì)的六大區(qū)別





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論