 怎樣為DSLR相機制作PanandTilt系統
怎樣為DSLR相機制作PanandTilt系統
步驟1:3D打印


首先,您將需要使用16mm bearing.stl 文件3D打印 Pand傾斜馬達安裝座3。完成打印后,您可以取出2個軸承并將它們放入板底部的孔中,如上圖所示。然后取一個黃銅支架,從板的另一側將其錘入軸承約3mm。現在取一個M3螺栓并將其從底部擰入支架,如上圖所示。拿起大齒輪,輕輕敲擊頂部支架。使用板另一端的4個小孔連接步進電機。將小齒輪安裝到電機軸上,然后將傳動皮帶放在兩個齒輪上。
步驟2:底部軛部分

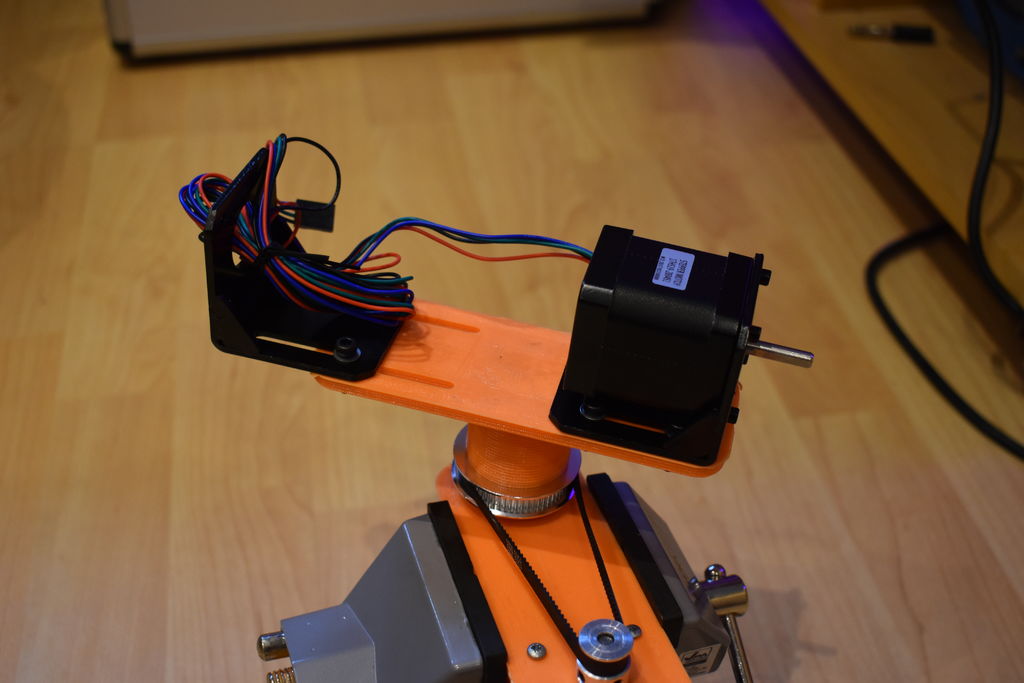
現在3D打印 Bottom Yolk Section.stl。打印完成后,使用某種形式的加熱來加熱底部的管道部分。然后將軛放在管道上的孔中的大齒輪上,齒輪上有一個平頭螺釘孔。將M4螺栓擰入將底部支架部分固定到大齒輪上的孔中。現在使用L型支架,4個M3螺釘和4個M4螺母和螺栓將第二個電機固定到支架部分。僅使用兩個M4螺母和螺栓將另一個L型支架固定到另一側。修正它,使其比軛部分的主體延伸得更遠,如上圖所示。
第3步:傾斜機制


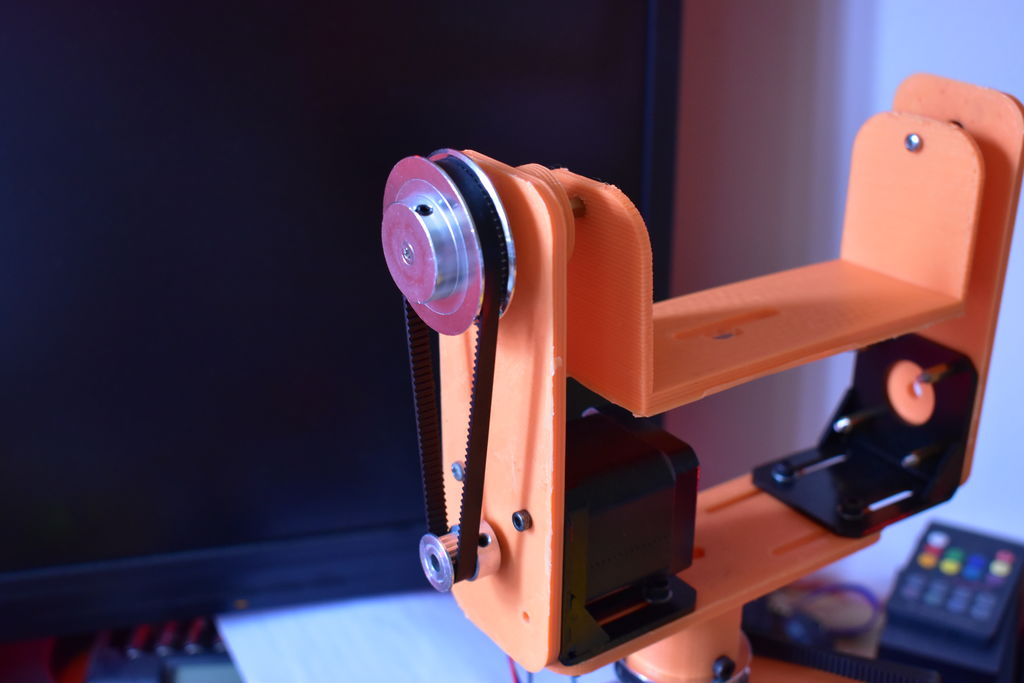
重復第一步,安裝2個軸承和黃銅支座,以創建齒輪系統,如何在另一側添加額外的黃銅支座。用于連接傾斜板的軸承。然后,您需要將此板連接到已安裝在底部軛板上的步進電機,確保大齒輪朝外。然后,這將允許您將小齒輪連接到步進軸,同時還可以放在皮帶輪上。
步驟4:傾斜機構:第2部分
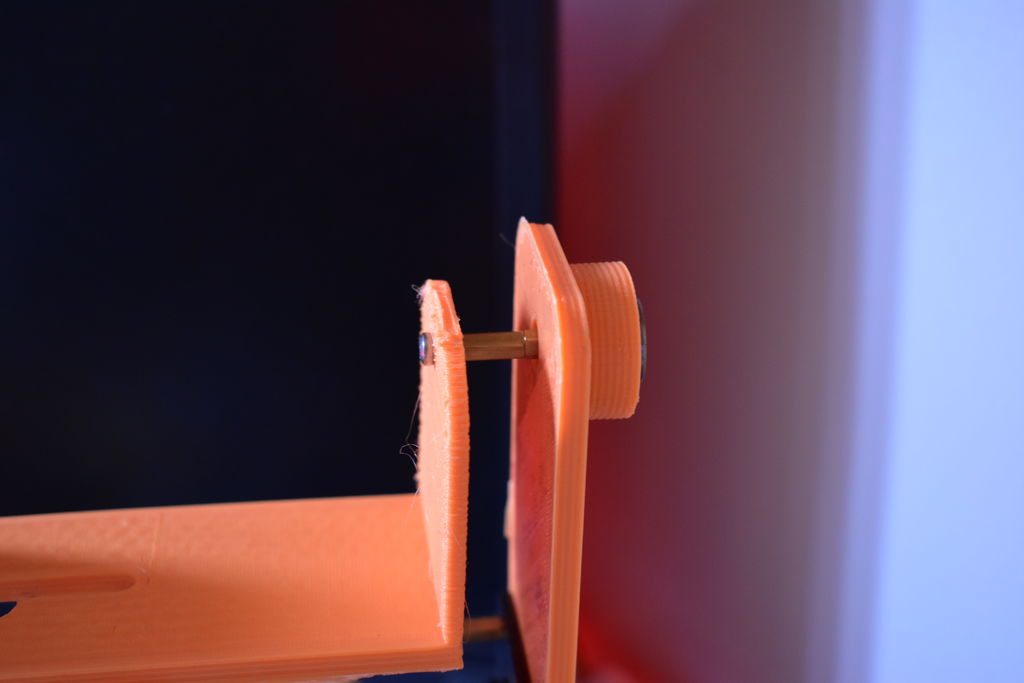
然后,您將使用16mm bearing.stl 取下最后一個 Pand傾斜馬達支架,并使用L型支架將其連接到底部支架部分的另一側, 4個M3螺釘和螺母。然后,您將以與步驟1和步驟3中相同的方式添加兩個軸承。您將在一個黃銅支座上錘入面向支架的一側的軸承。然后擰上一個M3螺絲,在另一個的末端添加另一個支架,如上圖所示。
步驟5:添加傾斜板
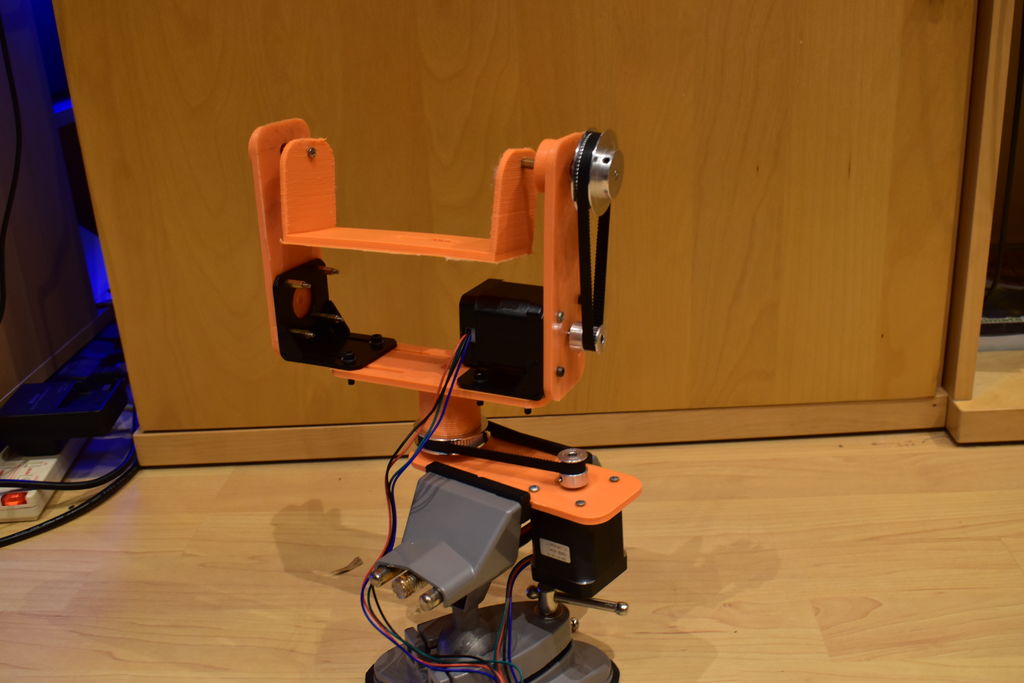
現在需要打印出 Camera mount.stl 文件。打印完成后,需要使用M3螺釘將任一端的兩端連接到黃銅支架上。一旦你完成了這項工作,你就完成了建筑方面的工作。
第6步:焊接和接線
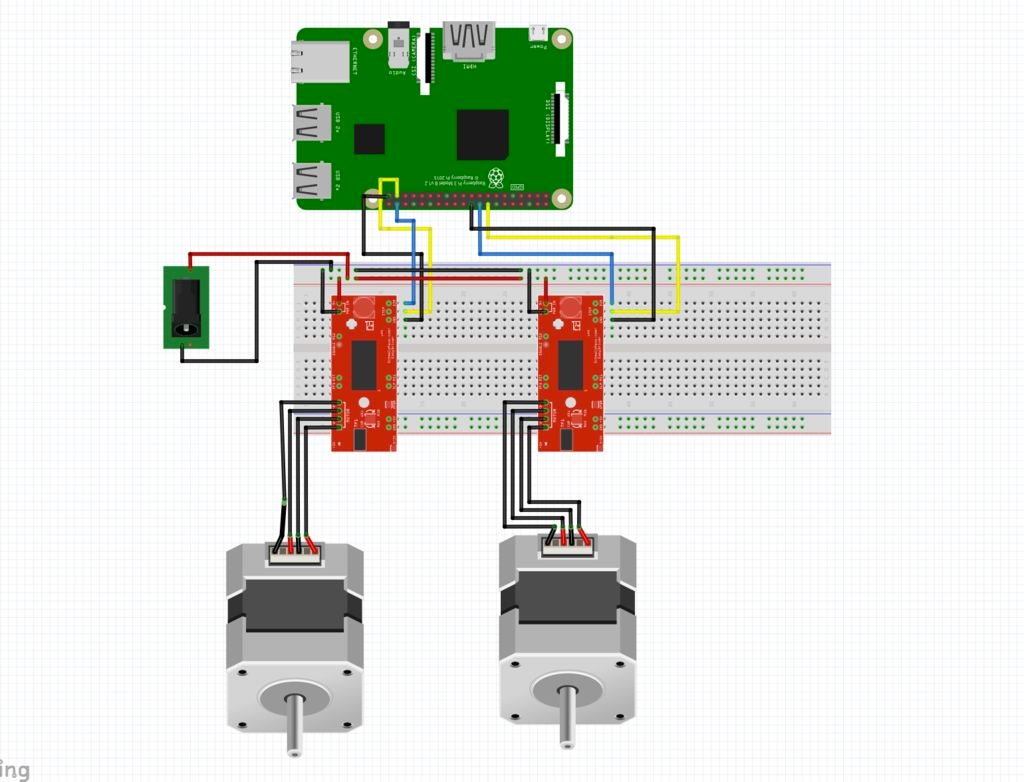
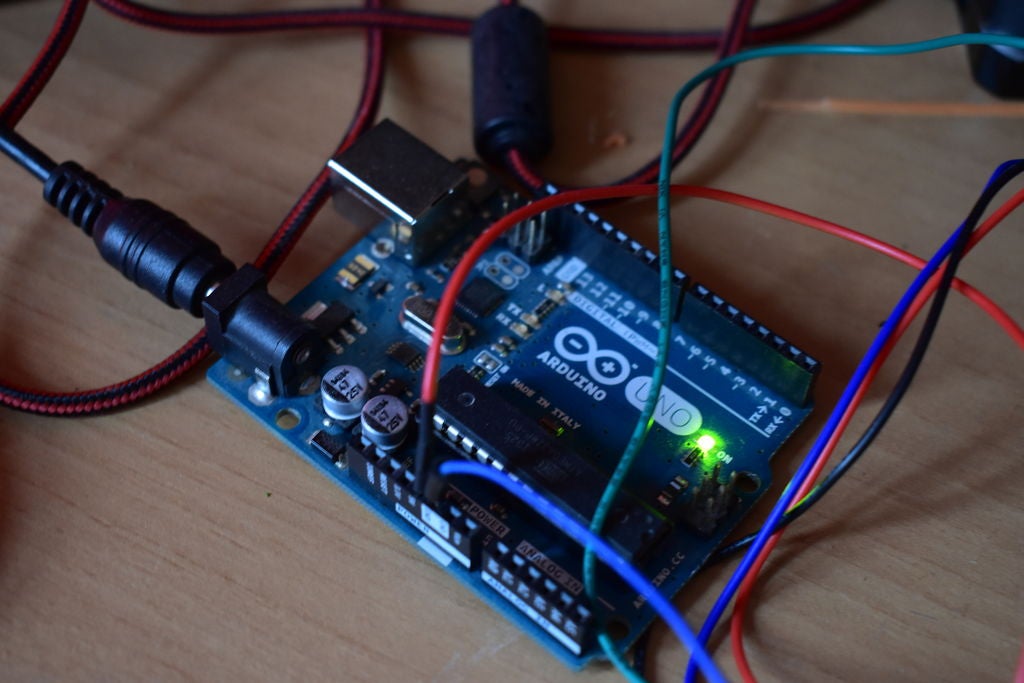
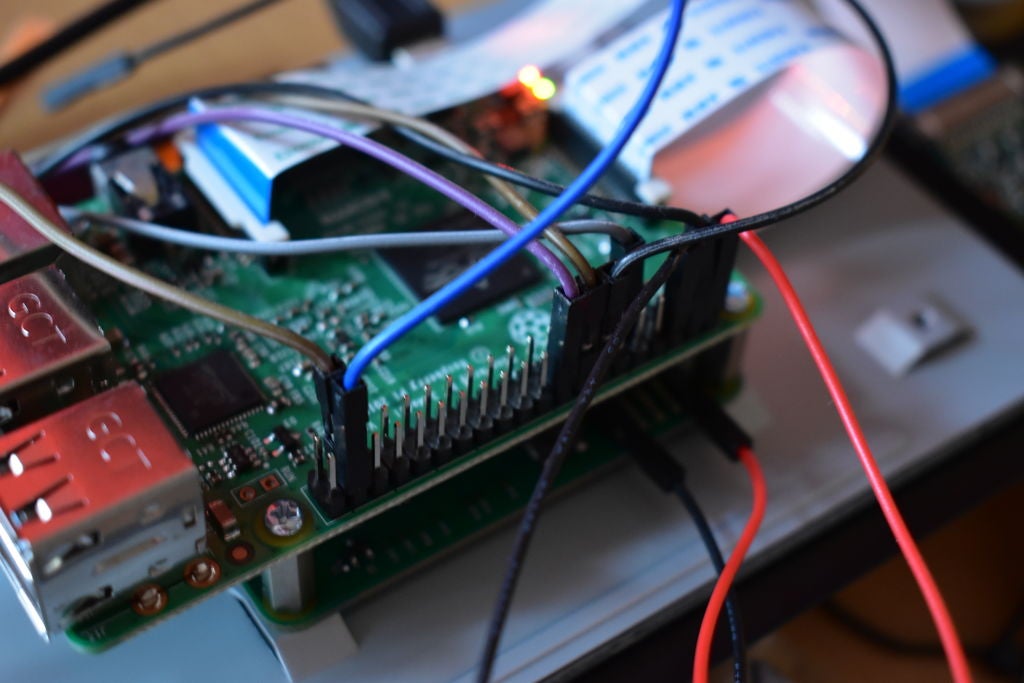
您現在需要將引腳焊接到2個簡單的驅動板上,因為這是我們將要用來驅動平移傾斜機構上有2個步進電機。以上是顯示Raspberry Pi 3的接線圖,因為這是我在制作時使用的。如果您使用不同版本的Raspberry Pi,請確保查看正在使用的Pi的GPIO標題圖,然后將信號和方向引腳更改為合適的引腳,確保您記住哪個是哪個。您還必須稍后更改代碼中的引腳編號。要為簡單的驅動器供電,您需要一個9V 2A電源。我使用了Arduino的DC桶式插孔,然后使用Arduino的電源引腳為兩個簡單的驅動器供電,但是你可能想要使用不同的東西。
第7步:設置Raspberry Pi和安裝Python程序
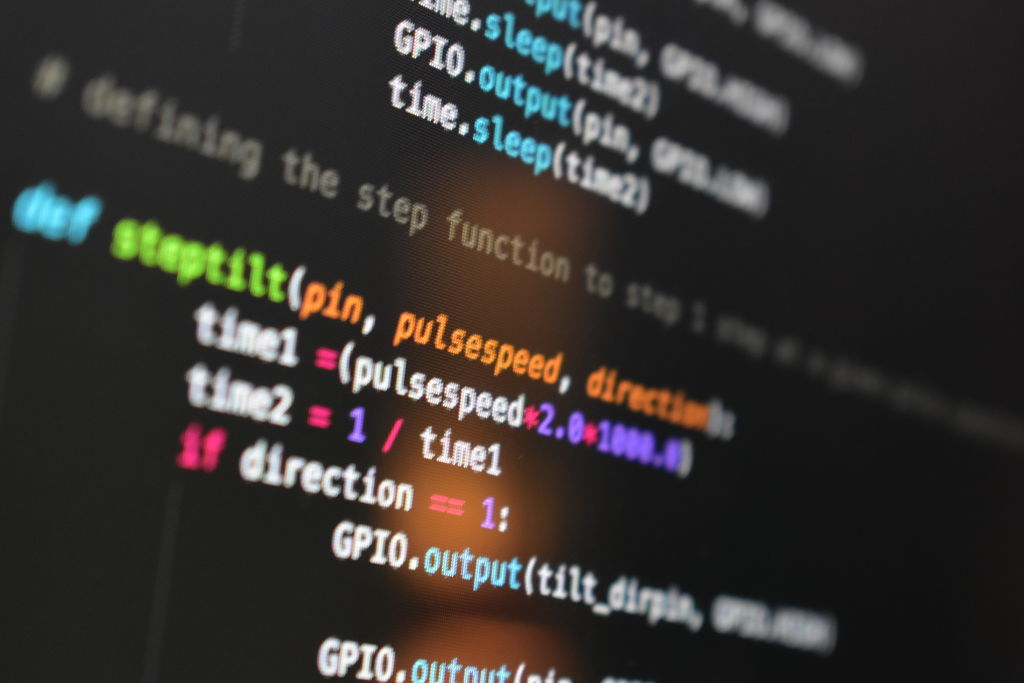
您需要下載 pantilt.py 和 2motors.py 并將其放在同一目錄中的Raspberry Pi上。然后要開始游戲中時光倒流,你必須運行2motors.py。應該出現一個GUI,這是您輸入延時設置的地方。目前GUI尚未完全完成,但我將很快添加更多內容。如果要添加GUI中未包含的任何其他功能,請隨意編寫自己的程序。
-
相機
+關注
關注
4文章
1437瀏覽量
54500 -
3D打印
+關注
關注
27文章
3585瀏覽量
111567
發布評論請先 登錄
Spinnaker 4 SDK助力擴展多相機成像系統

MICRO OLED 金屬陽極像素制作工藝對晶圓 TTV 厚度的影響機制及測量優化
使用CY3014USB芯片組制作了一臺相機,視頻顯示延遲怎么解決?
用于任意排列多相機的通用視覺里程計系統



簡述灰點工業相機的相關信息

愛普生FA-128 48MHz晶振在單反相機行業的應用

INA226INA226AQDGSRQ1的ALERT工作機制是怎樣的?
基于FPGA的CCD工業相機系統設計
相機氣密性檢測儀的日常維護方法





 工商網監
工商網監
評論