") 喝水機(jī)器人的制作
喝水機(jī)器人的制作
步驟1:在3dsmax中設(shè)計機(jī)器人3D模型
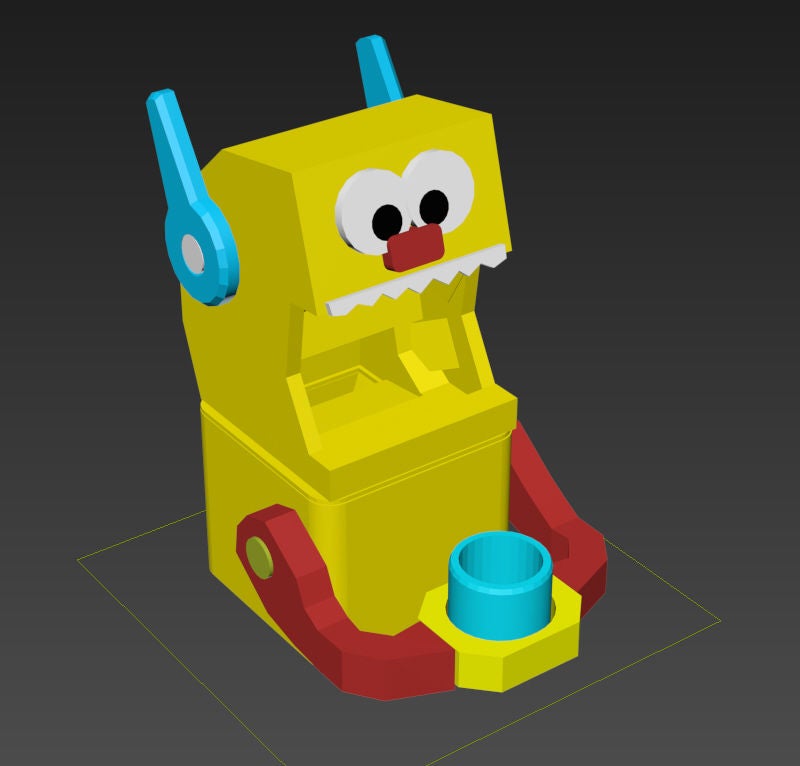
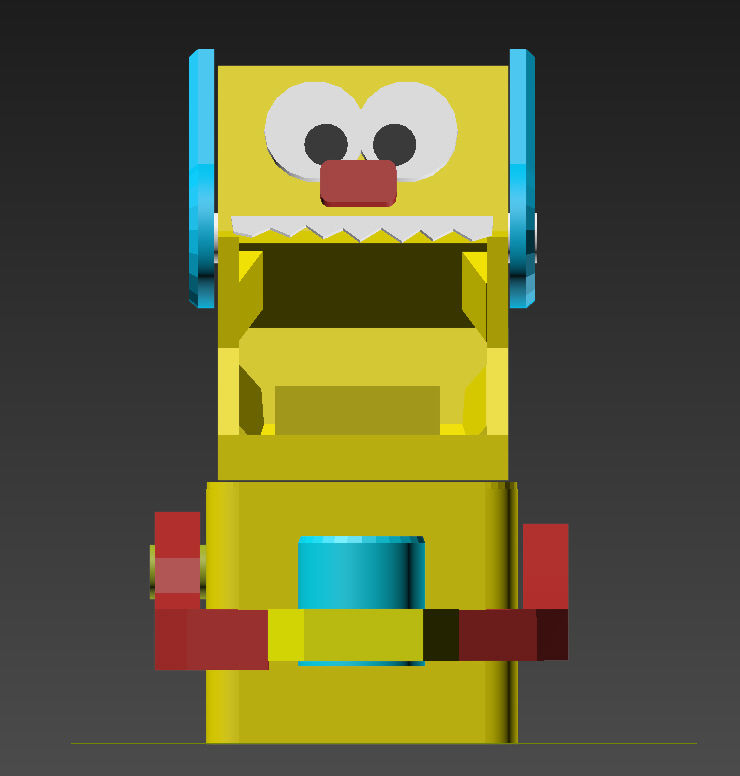
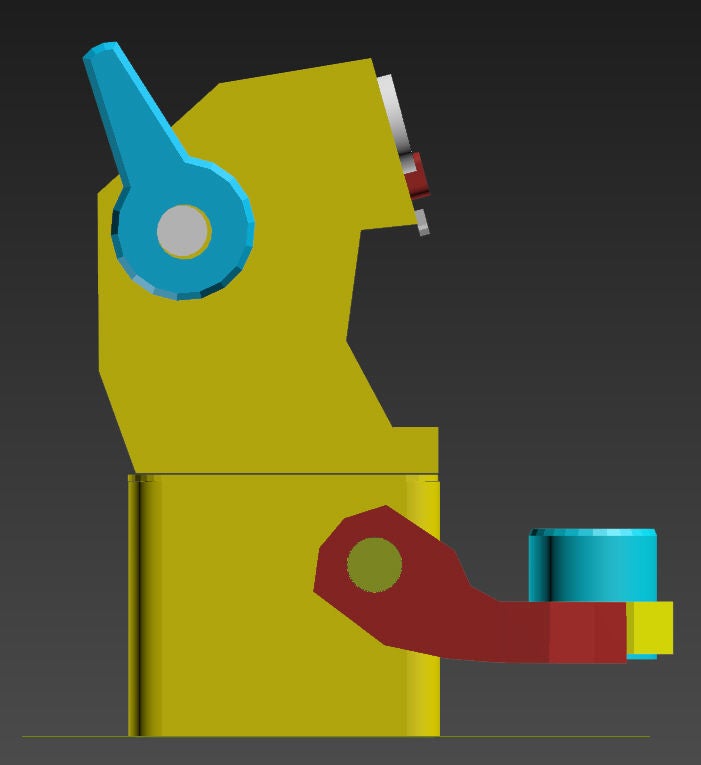
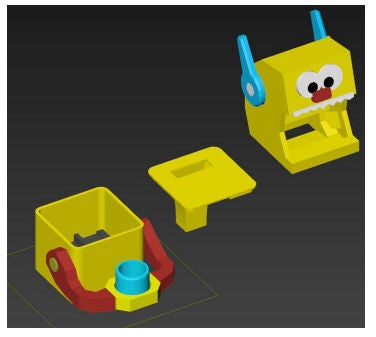
我們使用3dsmax來設(shè)計這個可愛的飲用水機(jī)器人。因?yàn)?span style="text-indent: 2em;">機(jī)器人會繼續(xù)飲酒,為了節(jié)省時間,嘴巴總是在打開。手和手應(yīng)該準(zhǔn)確,讓機(jī)器人可以將杯子放入大口,喝掉所有的水。在3d設(shè)計之后,我們可以使用3dsmax來模擬動畫,讓我們看看將來會發(fā)生什么。
第2步:準(zhǔn)備材料和電路圖
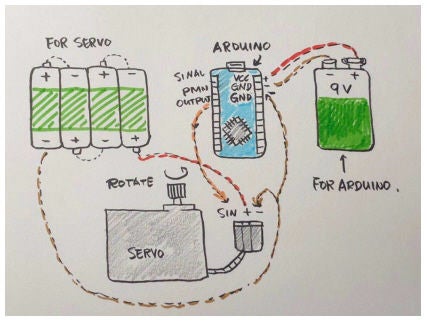
就像dino-robot風(fēng)格一樣,我們需要簡單的材料來制作
機(jī)器人。我們需要準(zhǔn)備如下材料:
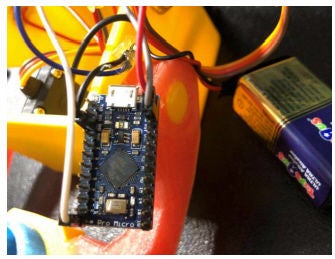
(1)四個1.5v電池和電池盒,它是伺服電源。
(2)一個9v電池用于arduino
(3)一個arduino mini usb,適合裝在小盒子里。
(4)一個90度或180度伺服
(5)電線,烙鐵和膠槍。
(6)兩個開關(guān)一個用于arduino,一個用于伺服。
(7)3d打印機(jī)
這個基本電路圖是如圖所示。
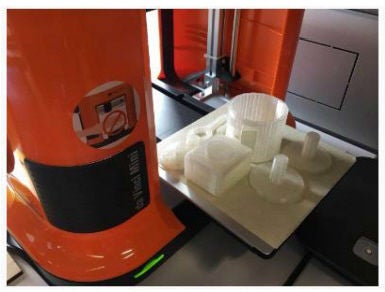
步驟3:3d打印所有部件
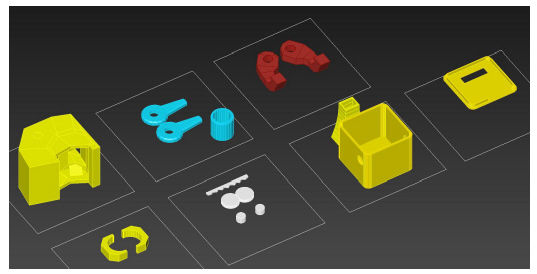
In 3dsmax我們按顏色分開
所有部分。使用3d打印機(jī)以不同顏色打印出來。
步驟4:使用膠槍粘貼所有部件


我們使用膠槍粘合所有連接部件。如圖所示。這里是機(jī)器人頭部的制作程序,頭部連接到管道。電機(jī)伺服僅控制右手,左手跟隨右手。伺服器粘在機(jī)器人的箱體上。 4x1.5v電池是機(jī)器人的背包。 9v電池和arduino板在盒體中。在我們使用膠水之后,情況顯示為照片。
步驟5:為Arduino編寫代碼
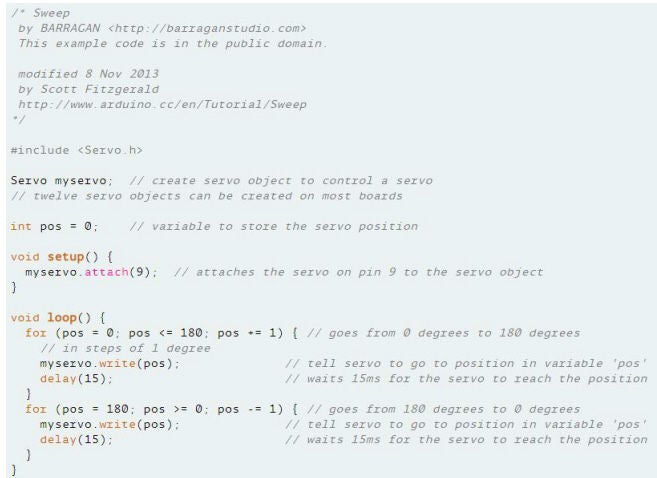
編寫arduino的代碼,這段代碼是可以控制伺服的經(jīng)典代碼
。簡單!
步驟6:打開開關(guān)


打開開關(guān),它移動!飲用
機(jī)器人將繼續(xù)飲用水。
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
29503瀏覽量
211589
發(fā)布評論請先 登錄





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論