 桌面千兆像素顯微鏡的制作
桌面千兆像素顯微鏡的制作

第1步:供應清單


材料:
1。尼康dSLR(我使用的是我的尼康D5000)
2。 28mm焦距鏡頭,52mm螺紋
3。 80mm焦距鏡頭,58mm螺紋
4。 52mm至58mm反向耦合器
5。三腳架
6。七張3毫米厚的膠合板
7。 Arduino Nano
8。兩架H橋L9110 https://www.amazon.com/gp/product/B00NN6EB3U/ref=o.。.
9。兩個紅外發射器
10。兩個紅外接收器
11。按鈕
12。兩個2.2kOhm電阻器
13。兩個150歐姆的電阻器
14。一個1kOhm電阻器
15。尼康相機的遠程發布https://www.amazon.com/gp/product/B00MCA191K/ref=o.。.
16。黑色海報板
17。硬件套件:https://www.amazon.com/gp/product/B06XQMBDMX/ref=o 。..
18。兩個步進電機(我使用Nema 17雙極步進電機3.5V 1A)
19。兩個2mm導螺桿
20。四個枕塊
21。兩個絲杠螺母
22。兩個軸承滑動襯套和200毫米線性軸:https://www.amazon.com/gp/product/B01KL7I65W/ref=p.。.
23。 5V電源:https://www.amazon.com/gp/product/B01M0KLECZ/ref=o.。.
24。繞絲線
工具
1。 激光切割機
2。 3D打印機
3。艾倫扳手
4。剪線鉗
5。繞線工具
步驟2:系統概述

要轉換樣品,兩個步進電機在正交方向上對齊在x和y方向上移動一個舞臺。電機由兩個H橋和一個Arduino控制。位于步進電機底部的IR傳感器用于將各級歸零,因此它們不會進入塊的任一端。數字顯微鏡位于XY平臺上方。
定位樣品并將載物臺居中后,按下按鈕開始采集。電機將舞臺移動到左下角,觸發相機。然后電機以小步驟平移樣品,因為相機在每個位置拍照。
拍攝完所有圖像后,將圖像拼接在一起形成千兆像素圖像。
第3步:顯微鏡裝配



我做了一個低倍顯微鏡,配有dSLR(尼康5000),尼康28mm f/2.8鏡頭和尼康28-80mm變焦鏡頭。變焦鏡頭的焦距設定為80mm。這兩個鏡頭的組合就像一個顯微管鏡頭和物鏡。總放大倍率是焦距的比率,約為3倍。這些鏡頭實際上并不是為這種配置而設計的,因此為了讓光像顯微鏡一樣傳播,你必須在兩個鏡頭之間放置一個光圈。
首先,將較長焦距的鏡頭安裝到相機上。從黑色海報板上切下一個圓圈,其直徑大致與鏡頭前表面的大小相同。然后在中間切一個小圓圈(我選擇直徑約3毫米)。圓的大小將決定進入系統的光量,也稱為數值孔徑(NA)。對于精心設計的顯微鏡,NA確定系統的橫向分辨率。那么為什么不在此設置中使用高NA?那么,有兩個主要原因。首先,隨著NA增加,系統的光學像差變得更加突出并且將限制系統的分辨率。在這樣的非傳統設置中,情況很可能如此,因此增加NA最終將不再有助于提高分辨率。其次,景深也取決于NA。 NA越高,景深越淺。這使得難以將不平坦的物體全部聚焦。如果NA變得太高,那么您將僅限于成像顯微鏡載玻片,其具有薄樣品。
兩個鏡頭之間的孔徑光闌的定位使得系統大致遠心。這意味著系統的放大率與物距無關。這對于將圖像拼接在一起變得很重要。如果對象具有不同的深度,則來自兩個不同位置的視圖將具有偏移的視角(如人類視覺)。將圖像拼接在一起并非遠心成像系統具有挑戰性,尤其是在高倍率的情況下。
使用58mm至52mm鏡頭反向耦合器將28mm鏡頭連接到80mm鏡頭,光圈位于中間。
第4步:XY舞臺設計






我使用Fusion 360設計了舞臺。對于每個掃描方向,有四個部分需要3D打印:貼片機安裝,兩個滑動單元擴展器和一個導螺桿安裝。 XY平臺的底座和平臺由3mm厚的膠合板激光切割而成。底座固定X方向電機和滑塊,X平臺固定Y方向電機和滑塊,Y平臺固定樣品。底座由3張紙組成,兩個平臺由2張紙組成。在該步驟中提供用于激光切割和3D打印的文件。切割和打印這些部件后,您就可以進行后續步驟了。
步驟5:電機安裝組件








使用繞線工具,將導線纏繞在兩個紅外發射器和兩個紅外接收器的引線上。對電線進行顏色編碼,以便了解哪一端是哪一端。然后切斷二極管上的引線,這樣只需從繞線開始。將電線滑過電機座中的導軌,然后將二極管推入到位。導線被引導,直到它們離開單元的后部才能看到它們。這些電線可以與電機線連接。現在使用四個M3螺栓安裝步進電機。對第二個電機重復此步驟。
步驟6:舞臺裝配













將底座1和底座2切口粘合在一起,其中一個切口帶有六角形開口,用于M3螺母。膠水干燥后,將M3螺母錘入到位。壓入板時螺母不會旋轉,因此您可以在以后擰入螺栓。現在粘上第三張底片(底座3)以蓋住螺母。
現在是時候組裝鉛螺母支架了。從支架上清除任何額外的燈絲,然后將四個M3螺母推入到位。它們是緊密配合,因此請確保使用小螺絲刀清除螺栓和螺母空間。將螺母對齊后,將導螺母推入底座并用4個M3螺栓固定。
將X方向線性平移器的軸承座,滑塊安裝座和電機座安裝到底座上。將導螺母組件放在導螺桿上,然后將導螺桿滑入到位。使用耦合器將電機連接到導螺桿。將滑塊單元放入桿中,然后將桿推入滑塊安裝座。最后,使用M3螺栓連接滑塊安裝延長器。
X1和X2膠合板以與基座類似的方式膠合在一起。 Y方向線性轉換器和樣品臺重復相同的步驟。
步驟7:掃描儀電子設備



每個步進電機有四根電纜連接到H橋模塊。根據上圖,IR發射器和接收器的四根電纜連接到電阻器。接收器的輸出連接到模擬輸入A0和A1。兩個H橋模塊連接到Arduino Nano上的引腳4-11。按鈕通過1kOhm電阻連接到引腳2,便于用戶輸入。
最后,dSLR的觸發按鈕連接到遠程快門,就像我為CT掃描儀所做的那樣(參見步驟7)。剪斷遙控快門線。電線標記如下:
黃色 - 聚焦
紅色 - 快門
白色 - 接地
為了聚焦鏡頭,黃色線必須接地。要拍攝照片,黃色和紅色線必須接地。我將二極管和紅色電纜連接到引腳12,然后我將另一個二極管和黃色電纜連接到引腳13.設置如DIY Hacks和How-Tos instructable中所述。
步驟8:獲取千兆像素圖像

附加的是gigapixel顯微鏡的代碼。我使用Stepper庫來控制帶H橋的電機。在代碼的開頭,您必須指定顯微鏡的視野和您想要在每個方向上獲取的圖像數量。
例如,我制作的顯微鏡的視野約為8.2mm x 5.5mm。因此,我指示電機在x方向上移動8mm,在y方向上移位5mm。在每個方向上獲取11個圖像,總共121個圖像用于完整的千兆像素圖像(在步驟11中關于此的更多細節)。然后,代碼計算電機需要按照此數量轉換平臺所需的步數。
這些階段如何知道它們相對于電機的位置?如何在沒有擊中任何一端的情況下翻譯?在設置代碼中,我編寫了一個函數,可以在每個方向上移動舞臺,直到它打破IR發射器和IR接收器之間的路徑。當IR接收器上的信號低于某個閾值時,電機停止。然后代碼跟蹤舞臺相對于該原始位置的位置。編寫代碼使電機不會轉換太遠,這會使平臺進入導螺桿的另一端。
一旦在每個方向上校準了舞臺,舞臺就會轉移到中心。使用三腳架,我將我的dSLR顯微鏡放在舞臺上。將相機區域與樣品臺上的交叉線對齊非常重要。一旦舞臺與相機對齊,我用一些畫家的膠帶將舞臺錄下,然后將樣品放在舞臺上。用三腳架z方向調整焦點。然后用戶按下按鈕開始采集。舞臺轉換為左下角,觸發相機。然后光柵掃描樣品,然后相機在每個位置拍攝照片。
還附上了一些用于排除電機和紅外傳感器故障的代碼。
步驟9:拼接圖像




獲取所有圖像后,您現在面對將它們拼接在一起的挑戰。處理圖像拼接的一種方法是手動對齊圖形程序中的所有圖像(我使用的是Autodesk的圖形)。這肯定會起作用,但它可能是一個痛苦的過程,并且圖像的邊緣在千兆像素圖像中是顯而易見的。
另一個選擇是使用圖像處理技術自動將圖像拼接在一起。該想法是在相鄰圖像的重疊部分中找到類似的特征,然后對圖像應用平移變換,使得圖像彼此對齊。最后,通過將重疊部分乘以線性權重因子并將它們加在一起,可以將邊緣混合在一起。如果您不熟悉圖像處理,這可能是一個令人生畏的算法。我在問題上工作了一段時間,但我無法獲得完全可靠的結果。該算法最擅長于具有非常相似特征的樣本,例如雜志圖像中的點。附件是我在Matlab中編寫的代碼,但它需要一些工作。
最后一個選項是使用千兆像素攝影拼接程序。我沒有任何建議,但我知道他們在那里。
第10步:顯微鏡性能


如果您錯過了,結果如下:雜志圖片,鉤針桌布和各種電子產品。
系統的規格列于上表中。我嘗試使用28mm和50mm焦距鏡頭進行成像。我根據衍射極限(約6μm)估算了系統的最佳分辨率。實際上很難在沒有高分辨率目標的情況下進行實驗測試。我嘗試打印這個大幅面攝影論壇上列出的矢量文件,但我受打印機分辨率的限制。我打印輸出的最佳結果是系統的分辨率《40μm。我還在樣品上尋找小而孤立的特征。雜志印刷中最小的特征是墨點,我估計也是大約40μm,所以我不能用它來更好地估算分辨率。電子產品中有一些小的草皮,非常孤立。因為我知道視場,我可以計算占用小凹坑的像素數來估算分辨率,大約10-15μm。
總的來說,我對系統的性能感到滿意,但是如果您想嘗試這個項目,我會有一些注釋。
舞臺的穩定性:首先,獲得高質量的線性平臺組件。我使用的組件比我想象的要多得多。我只使用套件中的一個滑塊安裝座用于每個桿,所以這可能就是為什么舞臺感覺不太穩定。這個階段對我來說效果很好,但對于更高放大倍率的系統來說,這將成為一個更大的問題。
更高分辨率的光學器件同樣的想法可以用于更高倍率的顯微鏡。但是,需要具有更精細步長的小型電動機。例如,使用此dSLR放大20倍將導致1mm的視野(如果顯微鏡可以在沒有漸暈的情況下對大型系統進行成像)。 Electronupdate使用CD播放器中的步進電機,用于更高倍率的顯微鏡。另一個折衷方案是淺景深,這意味著成像僅限于薄樣本,你需要在z方向上有更精細的平移機制。
三腳架的穩定性:使用更穩定的攝像機支架,該系統可以更好地工作。鏡頭系統很重,三腳架從其設計位置傾斜90度。我不得不用三腳架的腳壓下來以幫助穩定。快門也可以晃動相機足以模糊圖像。
-
顯微鏡
+關注
關注
0文章
621瀏覽量
24283
發布評論請先 登錄
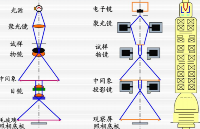
什么是透射電子顯微鏡?
VirtualLab Fusion應用:用于高NA顯微鏡成像的工程化PSF
VirutualLab Fusion應用:結構光照明的顯微鏡系統
?超景深3D檢測顯微鏡技術解析
VirtualLab Fusion案例:單分子顯微鏡高NA成像系統的建模
VirtualLab Fusion案例:高NA反射顯微鏡系統
共聚焦激光顯微鏡對比超分辨顯微鏡
德國進口蔡司體視顯微鏡的使用方法

優可測超景深數碼顯微鏡AH-3000系列 產品手冊
新品上市 | 優可測超景深數碼顯微鏡AH-3000系列:開啟智能顯微系統新時代






 工商網監
工商網監
評論