") Nixie三邊時(shí)鐘的制作教程
Nixie三邊時(shí)鐘的制作教程

步驟1:設(shè)備



設(shè)備
1。 Arduino Uno R3
2。 16X2 LCD顯示屏(僅用于測試,在最終組裝時(shí)移除)
3。 BME280傳感器
4。帶備用電池的RTC實(shí)時(shí)時(shí)鐘
5。 12V - 150V DC-DC升壓轉(zhuǎn)換器
6。 12V - 5V DC-DC降壓轉(zhuǎn)換器
7。 12V 1A - 電源適配器
8。 5V步進(jìn)電機(jī)28BY-48和控制器ULN2003
9。用于基礎(chǔ),平臺(tái)和規(guī)模的木材。
10。玻璃穹頂
11。 3mm黃銅棒
12。 3毫米黃銅圓頂螺母
13。黃銅板,2毫米(300毫米x 600毫米)
14。黑色100gsm紙
15。各種電纜
16。單極開關(guān)
17。 5v紅色LED
18。 12V正中心適配器入口
19。各種螺絲,塑料支架,熱縮,PCB引腳,電線
20。 PCB板(3 X 40mm X 20mm)
21。 5mm紅色LED
22。電流調(diào)節(jié)器:
a。 1K電阻
b。 1uF容量
c。 470歐姆電阻
d。 220K電阻
e。 2K裝飾罐,3296
f。 MJE340 NPN晶體管
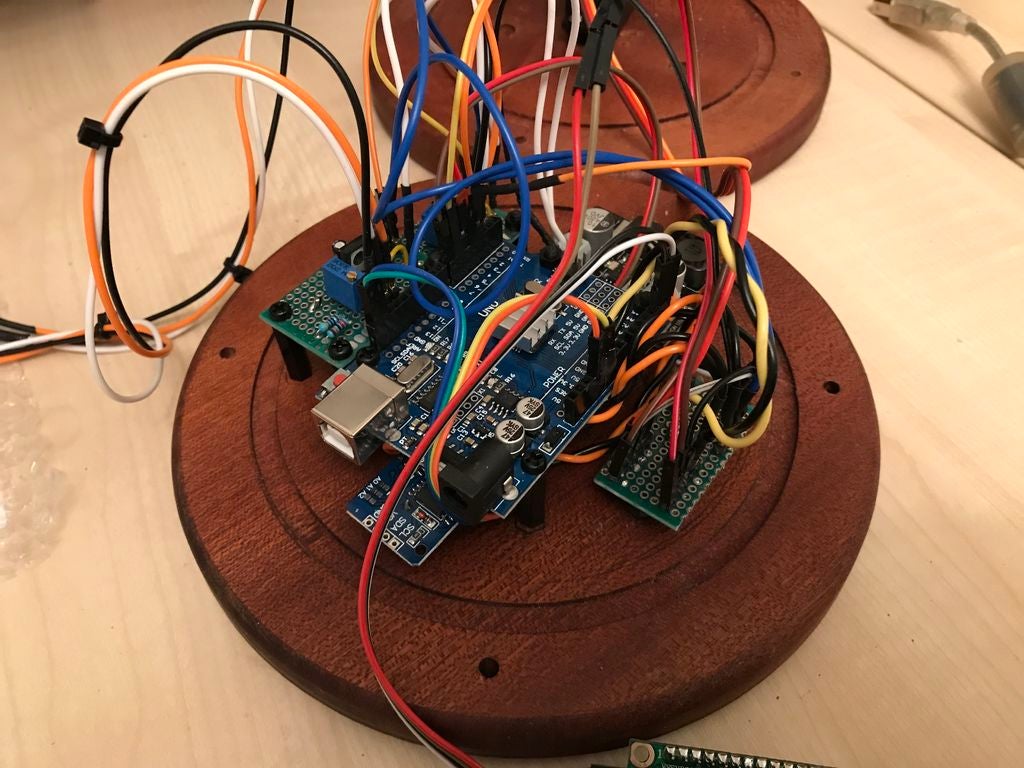
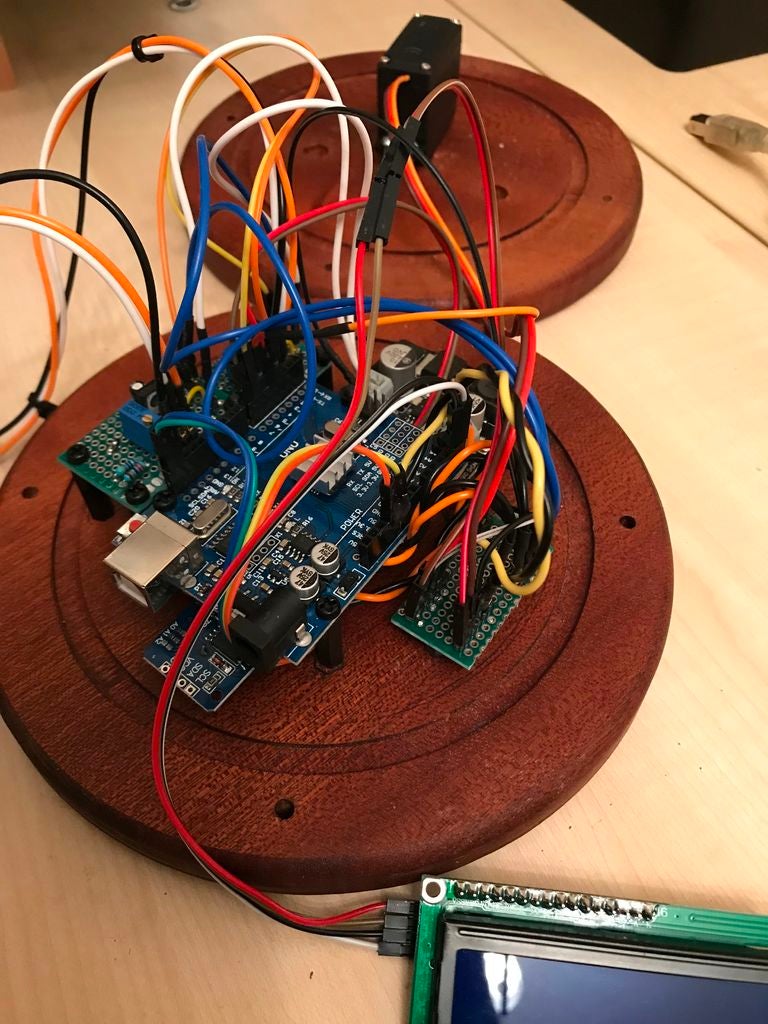
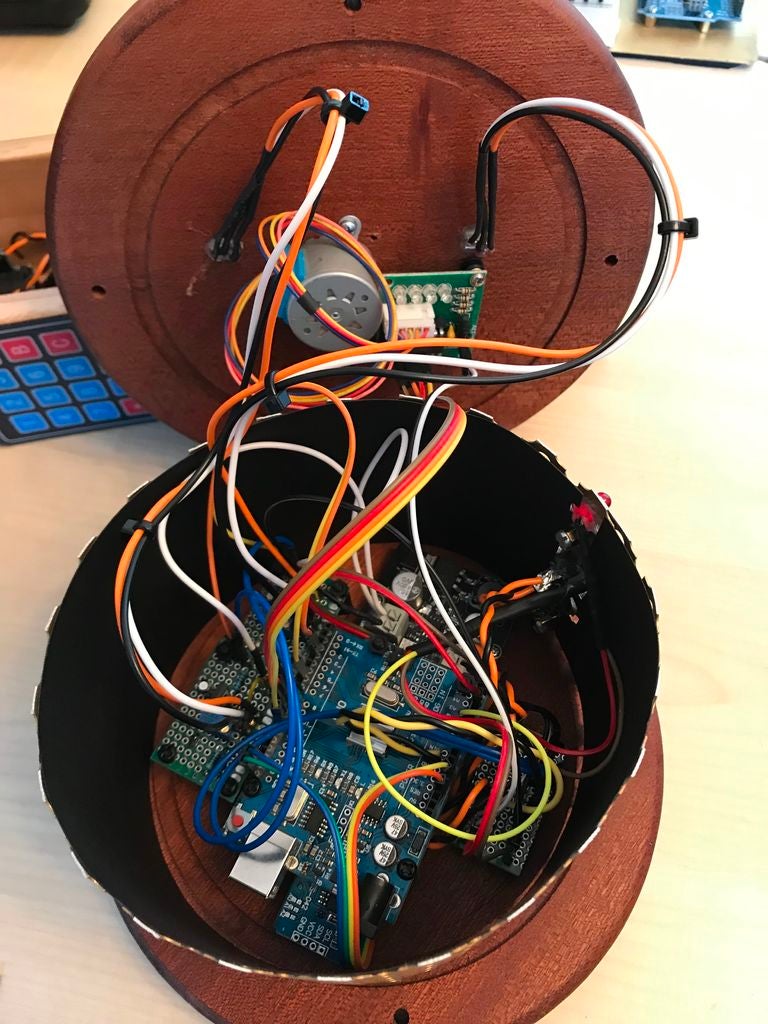
步驟2:構(gòu)造
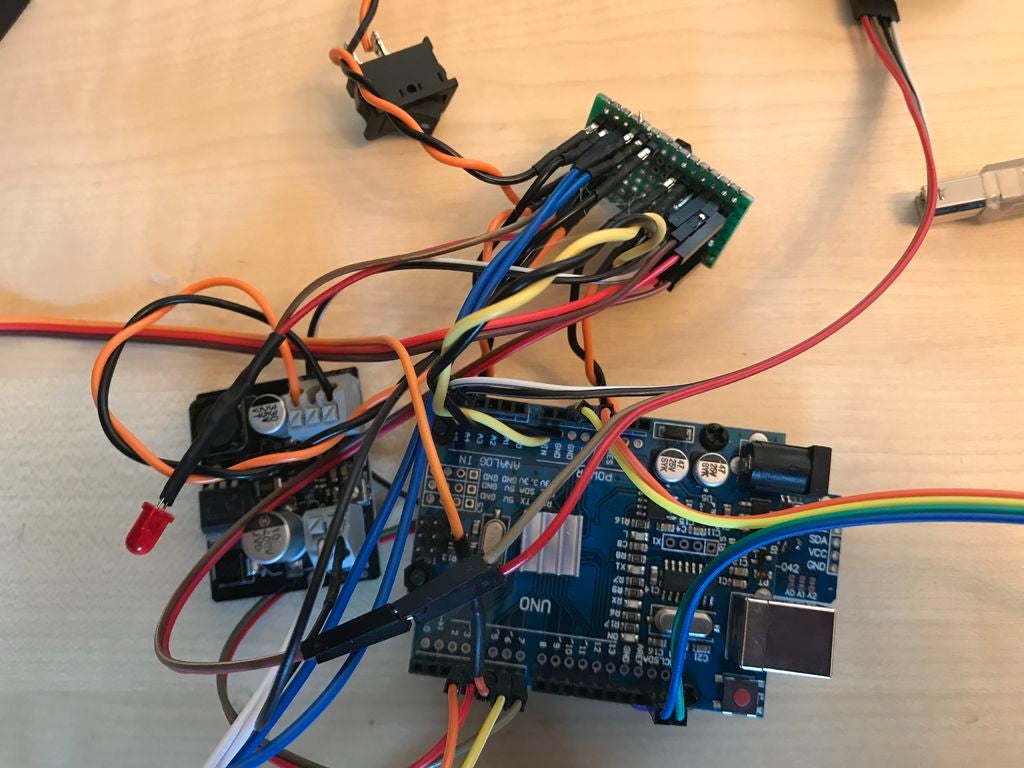
我附上了一張F(tuán)ritzing圖,顯示了這個(gè)項(xiàng)目的完整接線。
我附上了俄羅斯原裝IN-13數(shù)據(jù)表,MJE340數(shù)據(jù)表,TSR-3296數(shù)據(jù)表,MS Publisher Scales格式,和電流調(diào)節(jié)器原理圖
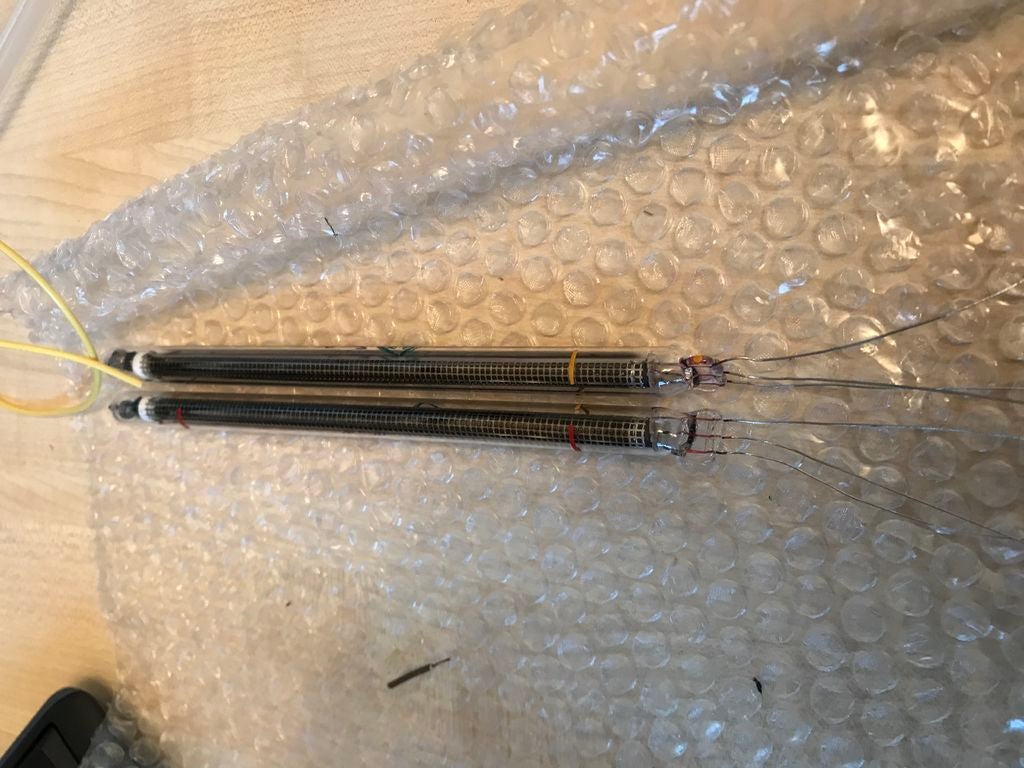
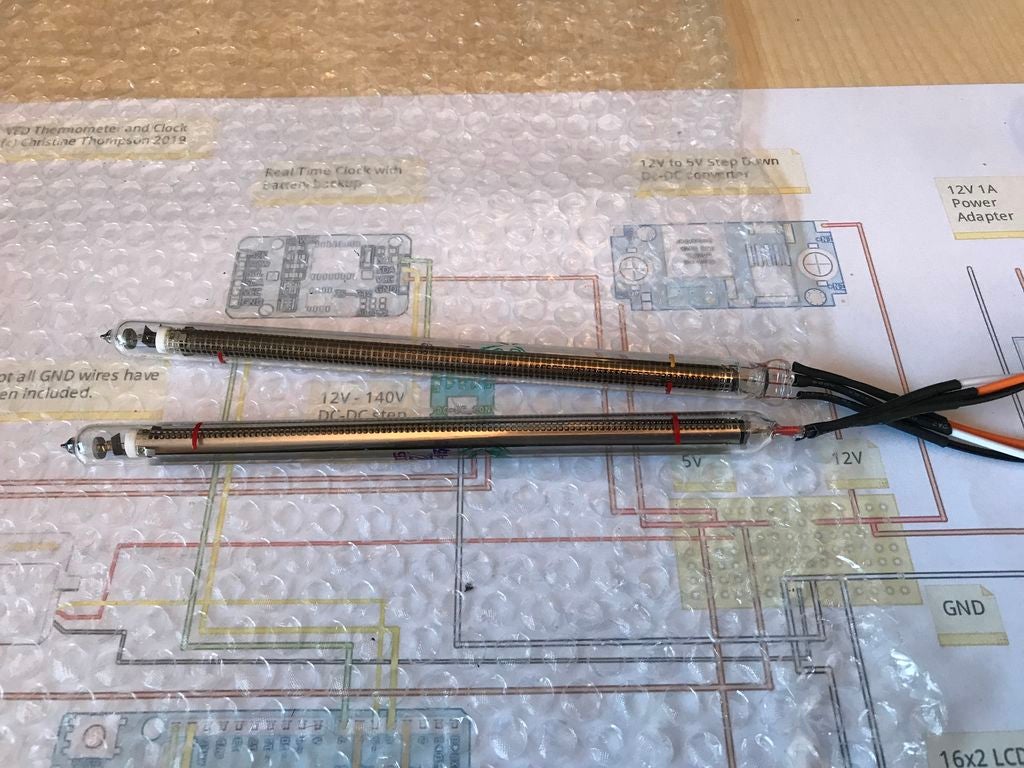
檢查IN-13時(shí),您會(huì)注意到管底部玻璃內(nèi)有一個(gè)粉紅點(diǎn)。在右側(cè),從左到右讀取的導(dǎo)線為:輔助陰極,Ind陰極和陽極。重要的是陽極不要過載,建議最大值為140V。
檢查2K微調(diào)電位器時(shí),抽頭連接是中心連接,可以使用兩個(gè)外部連接中的任何一個(gè)。在檢查MJE340晶體管時(shí),查看黑色塑料側(cè),而不是散熱器側(cè),從左到右讀取連接,給出發(fā)射器(E-1),收集器(C-2)和基座(B-3)。
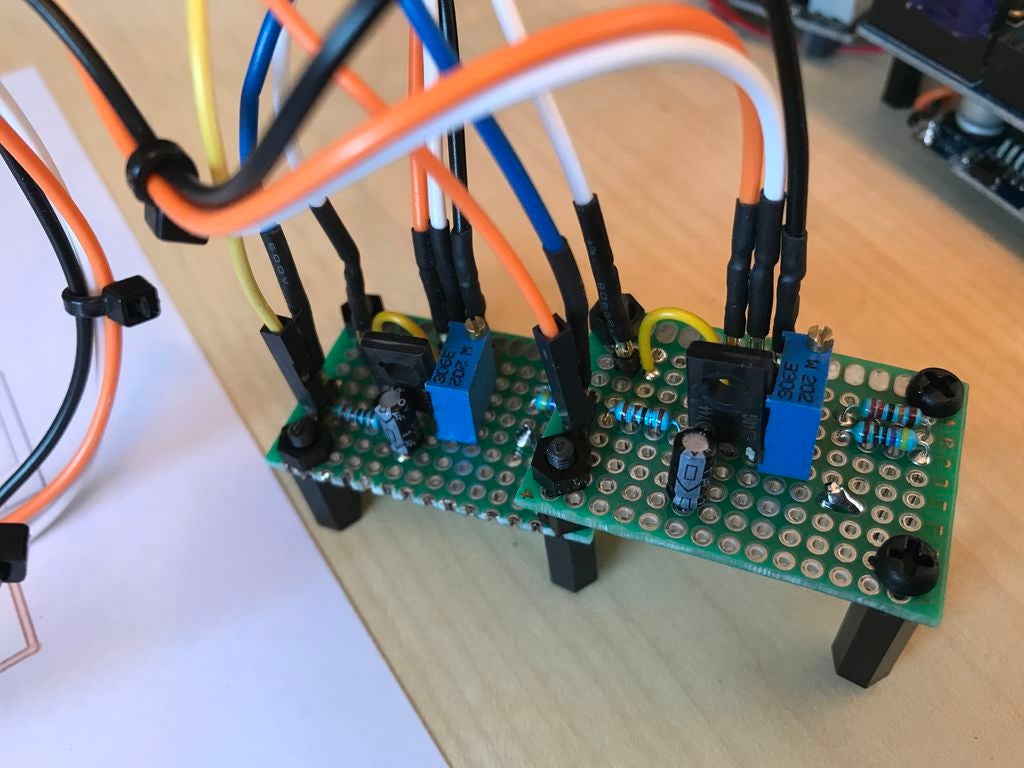
構(gòu)建電流調(diào)節(jié)器時(shí),電阻器可以安裝在任一方向,但電容器必須安裝時(shí)“負(fù)”灰色條朝向GND。同時(shí)確保所有GND返回單點(diǎn),這對(duì)于高壓GND也是最重要的,高壓GND也必須返回到同一點(diǎn)。
最常見的錯(cuò)誤是錯(cuò)誤地連接MJE340。
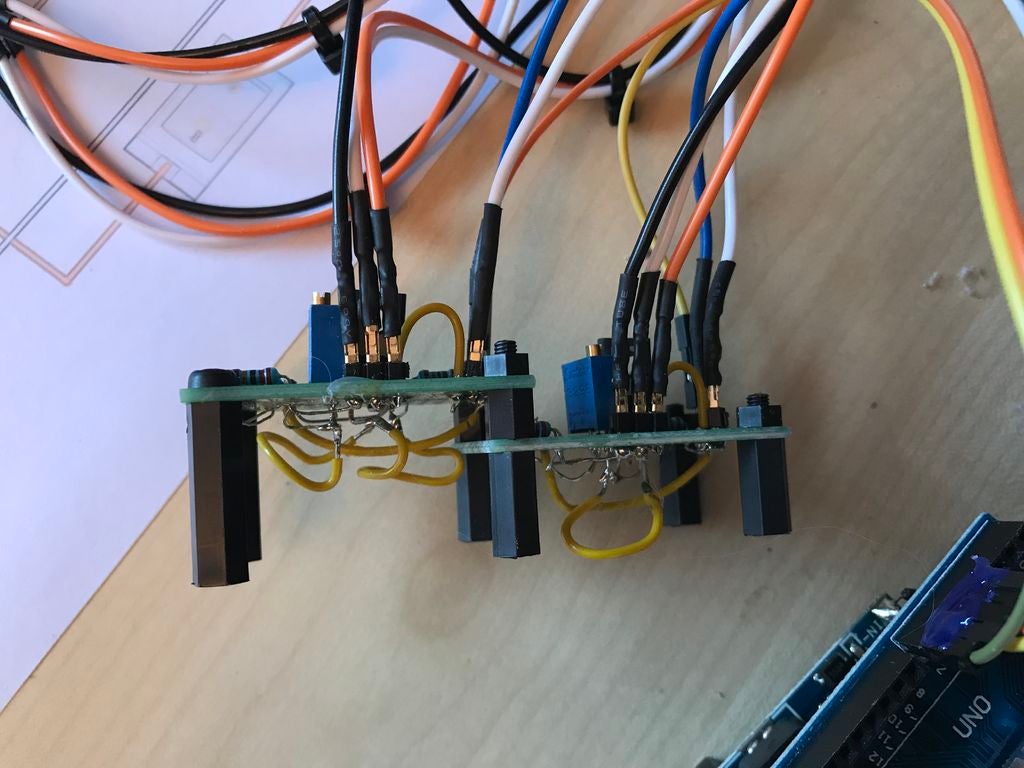
第3步:CURRENT REGULATOR





電流調(diào)節(jié)器將來自Arduino Uno的PWM數(shù)字脈沖轉(zhuǎn)換為IN-使用的模擬電流脈沖13 IND-陰極為顯示器供電。
每個(gè)電子管需要一個(gè)電流調(diào)節(jié)器。根據(jù)原理圖,Arduino Uno通過引腳3和6,兩個(gè)PWM使能,通過1K電阻控制MJE340的集電極。 1uF電容可以平滑電流波動(dòng)。一個(gè)470歐姆的電阻為2K微調(diào)電位器提供電流,220K電阻為輔助陰極提供電源。微調(diào)電位器允許設(shè)置最大和最小顯示值。 Trim電位為MJE340的發(fā)射極供電,Base引腳連接到Ind Cathode。
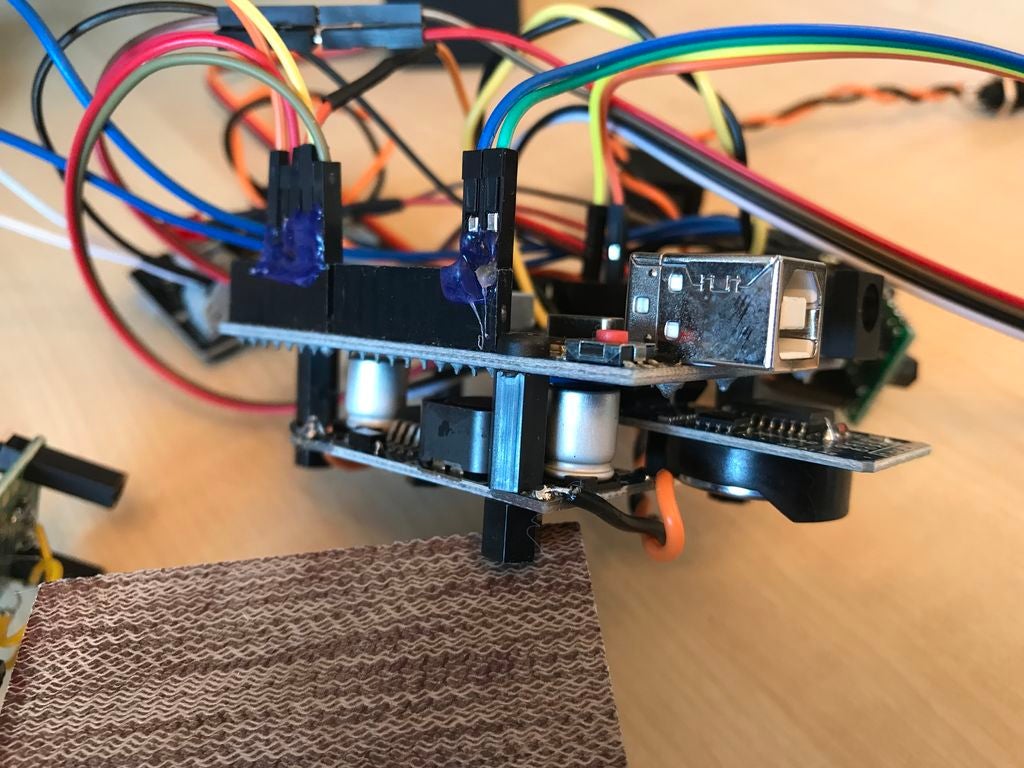
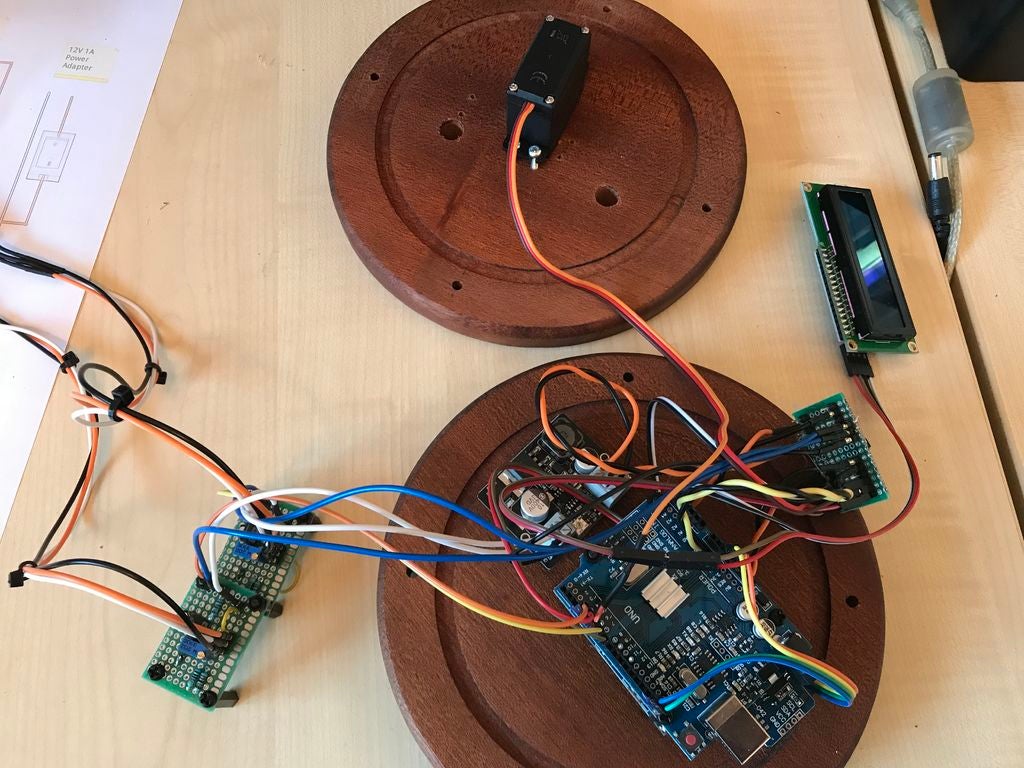
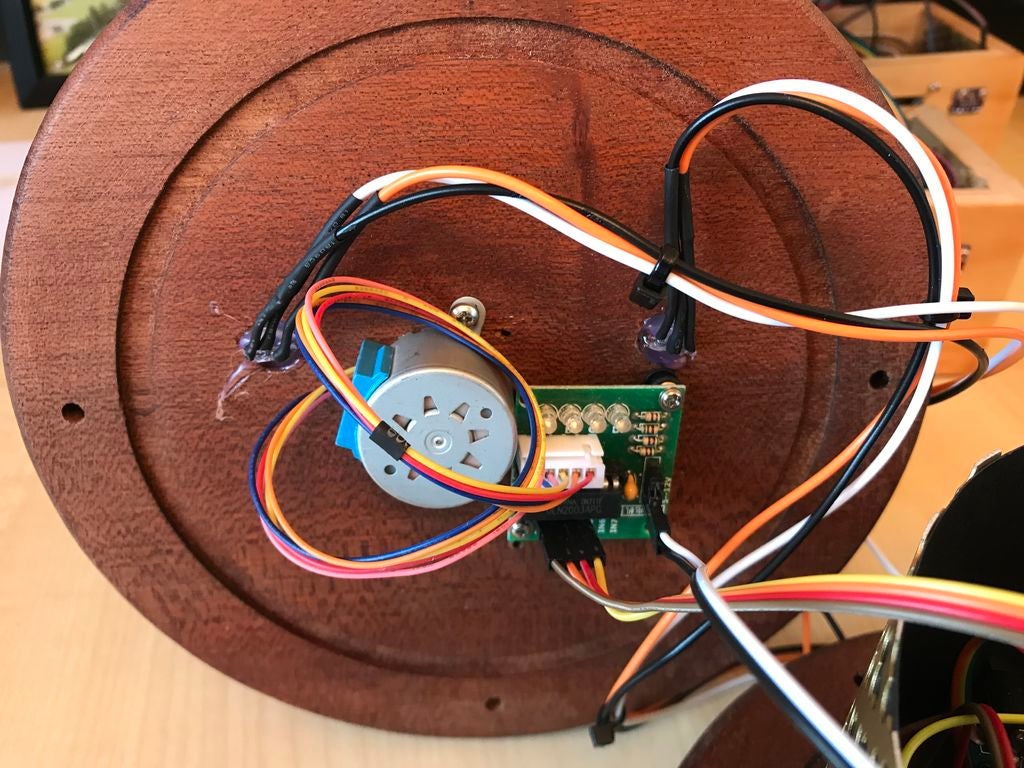
步驟4:步進(jìn)電機(jī)
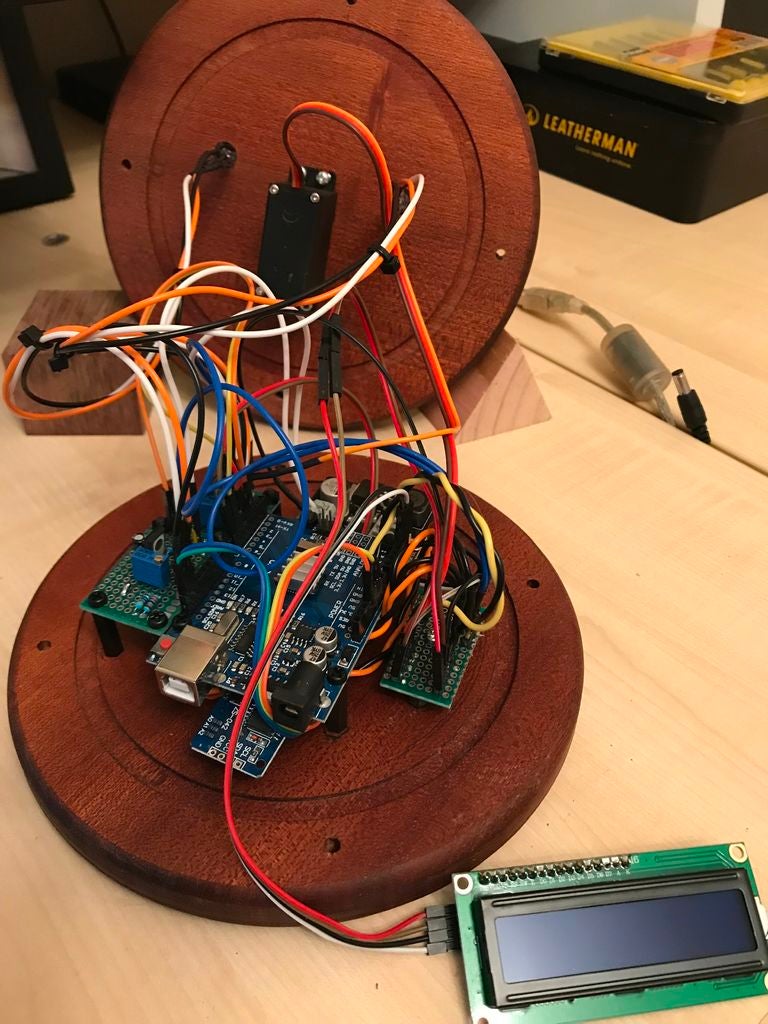
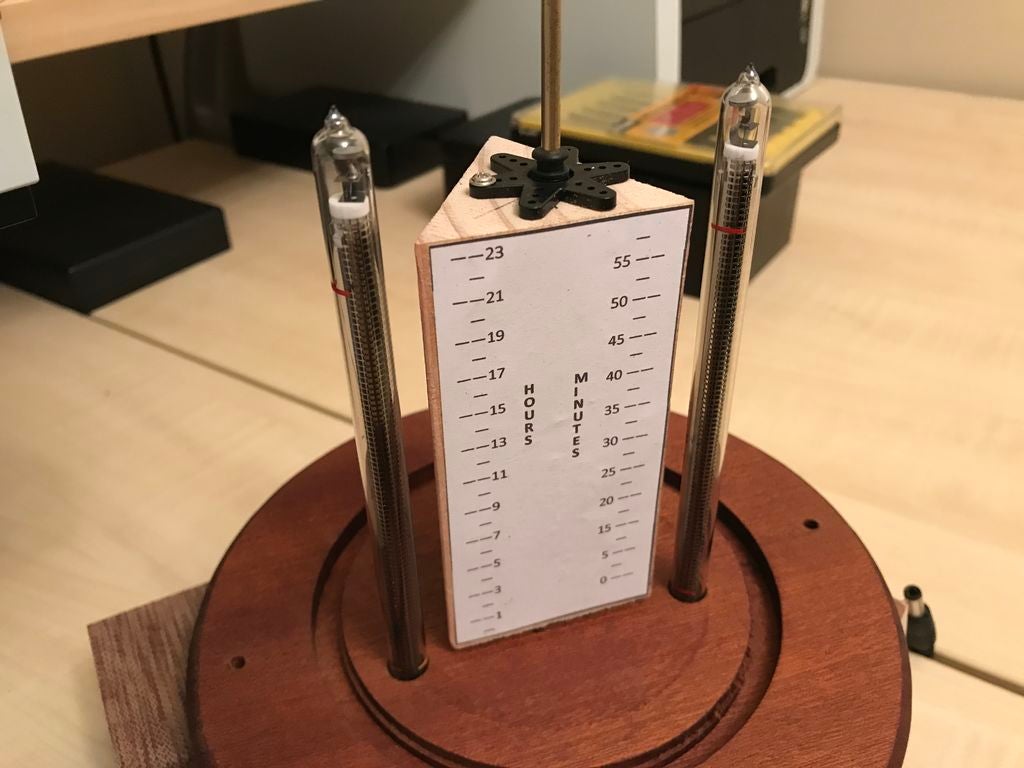
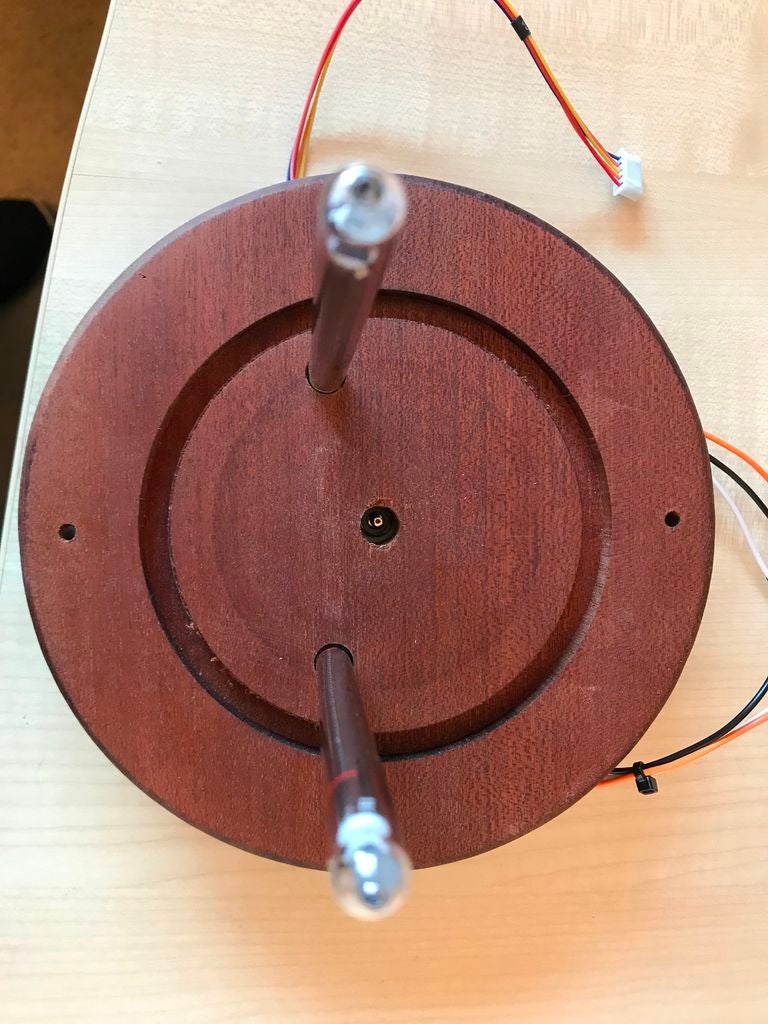
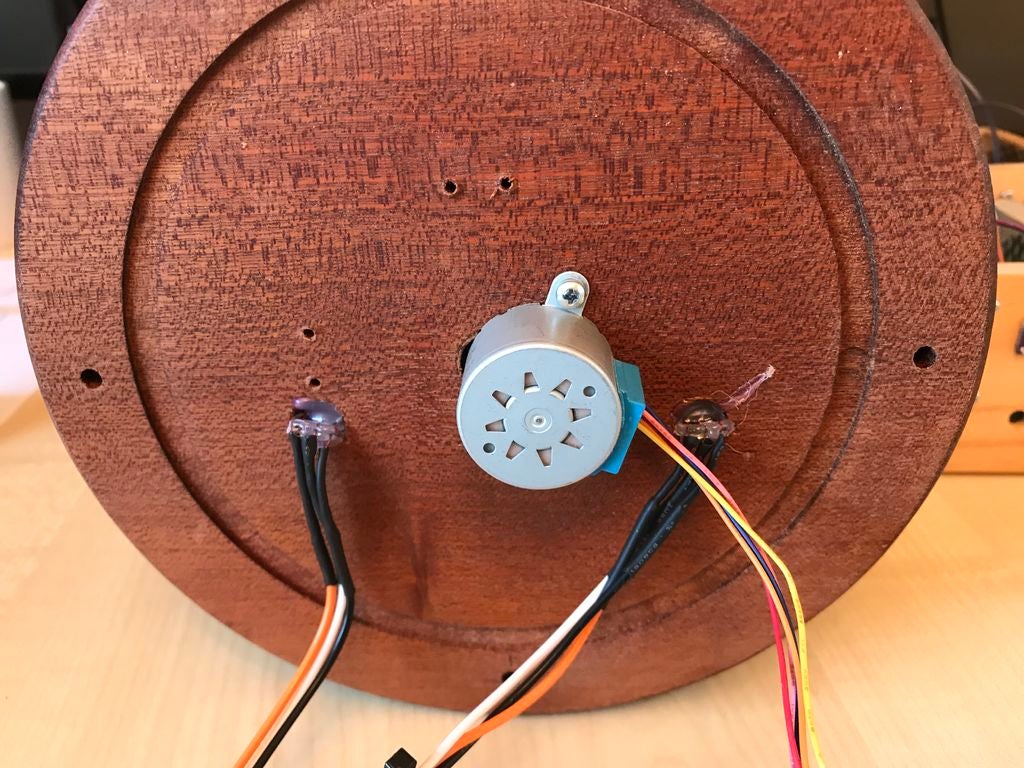
用360度伺服電機(jī)測試系統(tǒng)后我決定使用步進(jìn)電機(jī)提供更準(zhǔn)確的。步進(jìn)電機(jī)通過Arduino Uno的四條控制線進(jìn)行控制。步進(jìn)電機(jī)臂連接到3毫米的銅棒上,銅棒已經(jīng)鉆過三角形的木塊。桿的頂部被攻絲并穿過銅板并用圓頂黃銅螺母固定。
步進(jìn)電機(jī)與每組值的顯示相匹配,小時(shí)+分鐘,攝氏+華氏,濕度+壓力。每張臉與另一張臉成120度。為了計(jì)算出需要旋轉(zhuǎn)一次臂的步驟數(shù),我們得到:360/11.25 = 32步(4步順序,步幅為11.25)。連同64的齒輪比,我們得到(32 * 64)= 2048來完成一圈的旋轉(zhuǎn)。
因此,我們需要一個(gè)683的值來將手臂旋轉(zhuǎn)120度。
步進(jìn)電機(jī)安裝在頂板的底部,通過控制器8,9,10和11連接到Arduino Uno的控制器,連接到5V電源。
第5步:軟件

我附加了三個(gè)庫文件,全部來自https ://github.com/網(wǎng)站。附加的NCO文件中的其他“包含”文件都是標(biāo)準(zhǔn)庫文件。
我附上了兩個(gè)Arduino NCO文件,一個(gè)顯示Nixie管的校準(zhǔn),另一個(gè)顯示用于控制項(xiàng)目的完整程序。攝氏溫度,華氏溫度,壓力和濕度獲得的值都轉(zhuǎn)換為整數(shù),并且還受限于使用CONSTRAIN Arduino函數(shù)。此外,MAP函數(shù)還用于將這些整數(shù)值映射到40到255的固定范圍(IN-13管的最小值和最大值),關(guān)鍵代碼如下:
對(duì)于小時(shí)和分鐘:
小時(shí)=約束(小時(shí),0,23);
分鐘=約束(分鐘,0,59);
new_hours = map(小時(shí),0,23,40,255);
new_minutes = map(分鐘,0,59,40,255);
對(duì)于Celsius和華氏度:
攝氏度=約束(攝氏10,35);
fahrenheit = constrain(fahrenheit,50,100);
new_celsius = map(攝氏10,35,40,255);
new_fahrenheit = map(fahrenheit,50,100,40,255);
對(duì)于壓力和濕度:
Bar_pressure = constrain(Bar_pressure,980,1030);
Percentage_humidity = constrain(Percentage_humidity,30,80);
new_Bar_pressure = map(Bar_pressure,980,1030,40,255);
new_Percentage_humidity = map(Percentage_humidity,30,80,40,255);
注意:固定范圍通過使用固定值校準(zhǔn)IN-13M并觀察光柱的最終位置來確定40至255的值。
注意:已添加軟件的V2版本。這個(gè)版本糾正了兩個(gè)問題,一個(gè)是使用步進(jìn)電機(jī)轉(zhuǎn)動(dòng)三面木塊,另一個(gè)是光檢測處理。
步驟6:結(jié)論和審查
這個(gè)項(xiàng)目很有意思,因?yàn)樗屛业谝淮问褂貌竭M(jìn)電機(jī)和IN-13 Nixie管。步進(jìn)電機(jī)最終是中央顯示器運(yùn)動(dòng)的最佳選擇,因?yàn)樗欧姍C(jī)無法提供我所需的精度。
有必要使用校準(zhǔn)程序以提供盡可能多的每個(gè)IN-13數(shù)碼管顯示的顯示器或顯示器高度盡可能準(zhǔn)確。雖然時(shí)間,溫度,壓力和濕度讀數(shù)準(zhǔn)確地將這些值映射到IN-13上并不容易,但Arduino MAP功能為這個(gè)過程提供了很大的幫助。
我已經(jīng)包含了一個(gè)MS Publisher文件保存每個(gè)值的打印比例。我決定將這些打印到黃色的100 GSM紙上,以提供背景和打印的字母和數(shù)字之間的最大對(duì)比度。
-
時(shí)鐘
+關(guān)注
關(guān)注
11文章
1898瀏覽量
133192
發(fā)布評(píng)論請(qǐng)先 登錄
三邊直線電機(jī)
AOA 和 channel Sounding 和 rssi 定位技術(shù)對(duì)比
開源項(xiàng)目:復(fù)古又現(xiàn)代的輝光管音量指示器(Nixie Tube Audio Meter)

PCBA設(shè)計(jì)工藝邊:提升生產(chǎn)效率與精度的關(guān)鍵
開源項(xiàng)目!手把手教你制作一個(gè)互動(dòng)式LED墻壁時(shí)鐘!
高邊開關(guān)主板評(píng)估模塊

邊坡智能監(jiān)測識(shí)別攝像頭

邊坡在線監(jiān)測系統(tǒng)有哪些優(yōu)勢
求助大佬,多位數(shù)碼管如何同時(shí)亮并間隔一段時(shí)間再滅?``` ?
邊坡監(jiān)測系統(tǒng)有哪些功能特點(diǎn)
雙臂電橋與單臂電橋有何異同
具有三態(tài)輸出的CDC339時(shí)鐘驅(qū)動(dòng)器數(shù)據(jù)表





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論