 老鼠機器人的制作教程
老鼠機器人的制作教程
第1步:你需要什么:
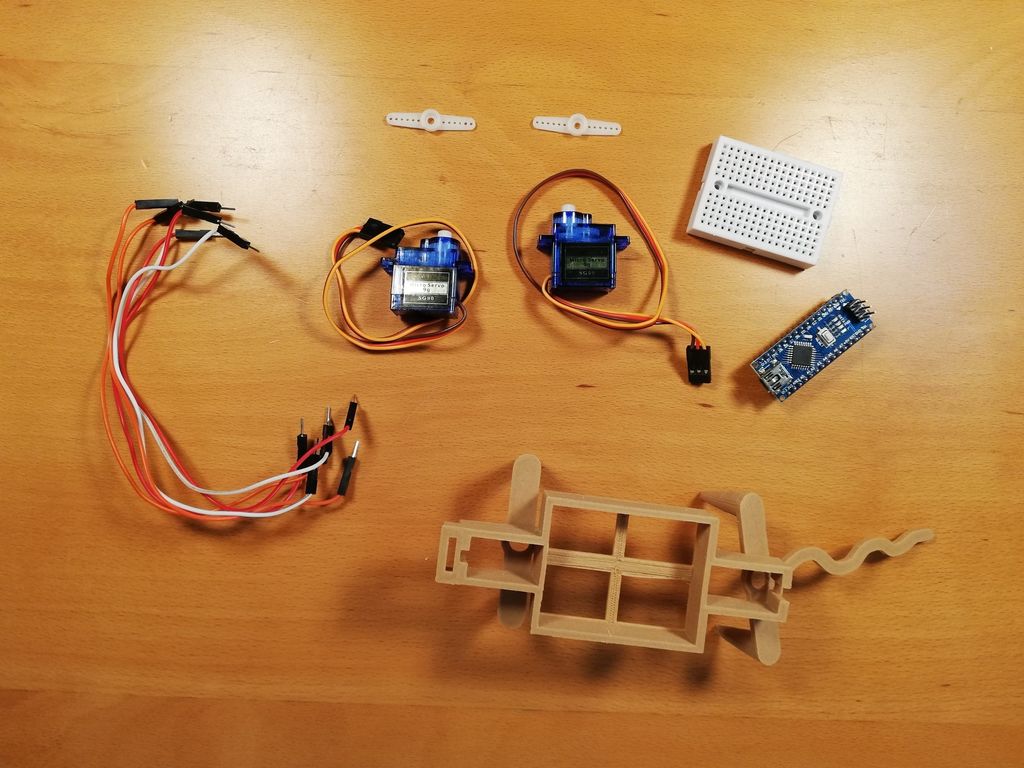
- 2臺SG90伺服電機(您可以在亞馬遜或某些在線商店中找到它們)
- 您必須打印3D模型,或者您可以使用紙板或塑料制作結構。
- 一些電線和一個小面包板
- 9伏電池和連接器
此外,您還需要使用arduino IDE
步驟2:校準舵機
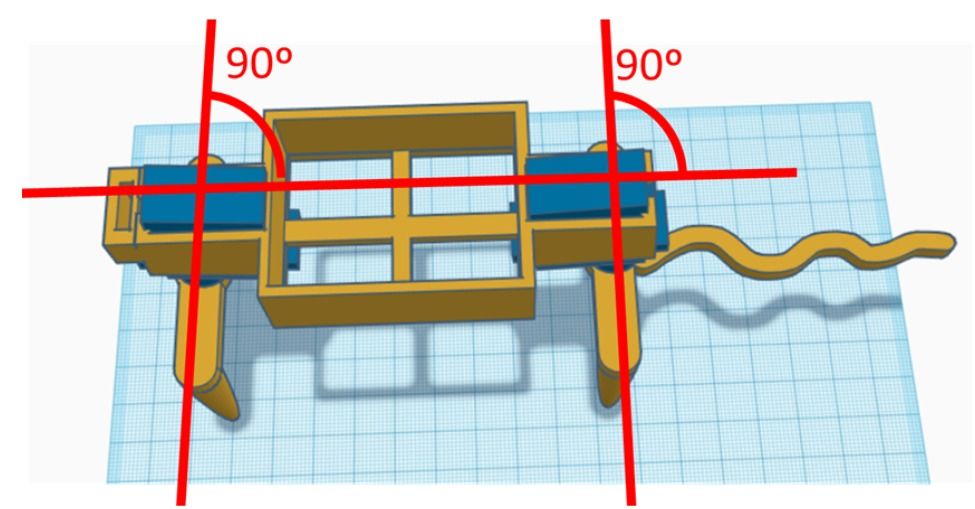
在啟動機器人之前,您必須執行上一步。你需要找到伺服的中間位置。伺服可以轉動180度(半個圓周),你需要先找到90度位置的位置才能使腿垂直于身體。為此,我編寫了一個程序,將伺服系統置于90o位置。一旦伺服系統處于90o,您就會有一個參考點,指示伺服將在程序開始處的位置。
這是我用來使伺服器居中的程序:
#include
伺服前線;
伺服返回;
void setup(){
Front.attach(9);
Back.attach(6);
}
void loop(){
Front.write(90);
Back.write(90);
}
您必須對軟件或硬件進行小幅調整,以改善機器人的移動和獲得完美的步態,但首先讓機器人移動,在項目結束時,您將能夠進行這些調整。
步驟3:組裝腿
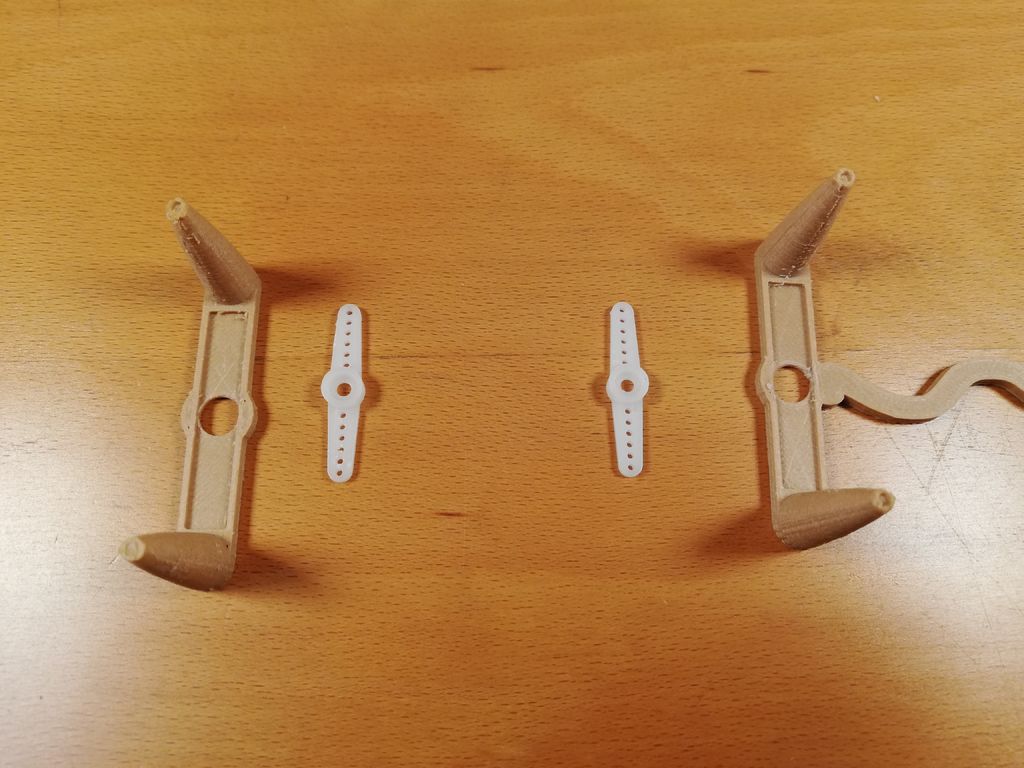
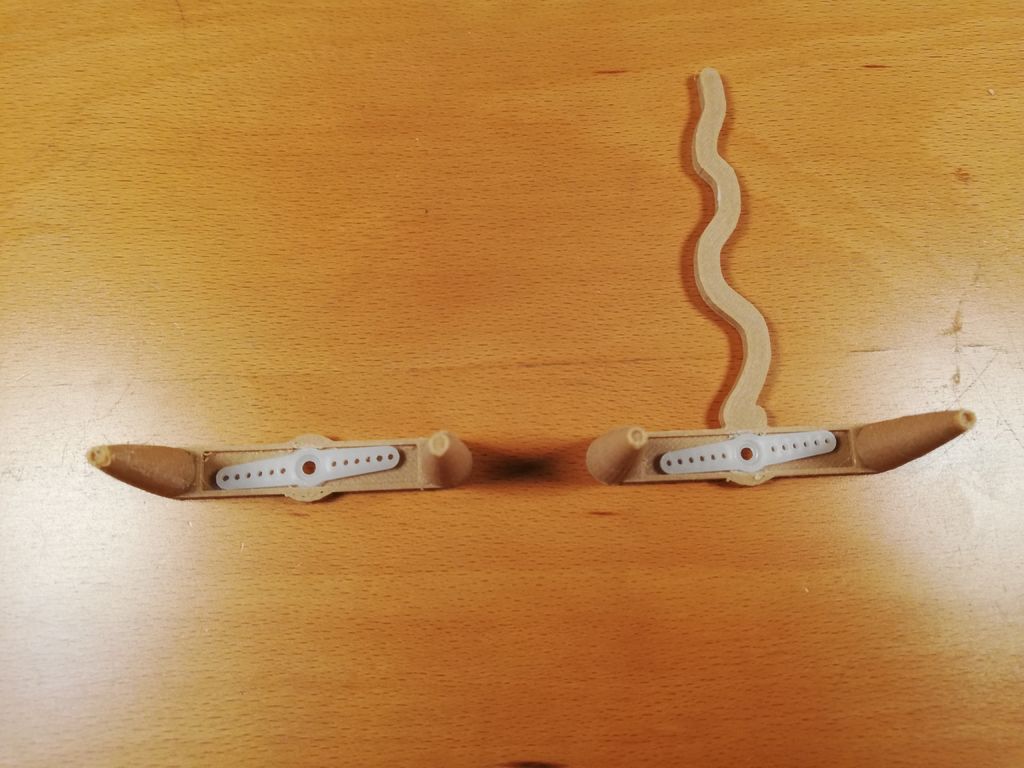
在此之后你必須把舵機的軸放到腿部。機器人,為了使這更容易,你可以在腿的孔周圍切割一些材料進入那里的軸。
其次你需要將帶有3D支腿的軸擰入伺服系統,當你所有人都在正確的位置時,在軸和腿之間放一點熱膠,將它們固定到位。確保將腿放在90度,如步驟2所示。
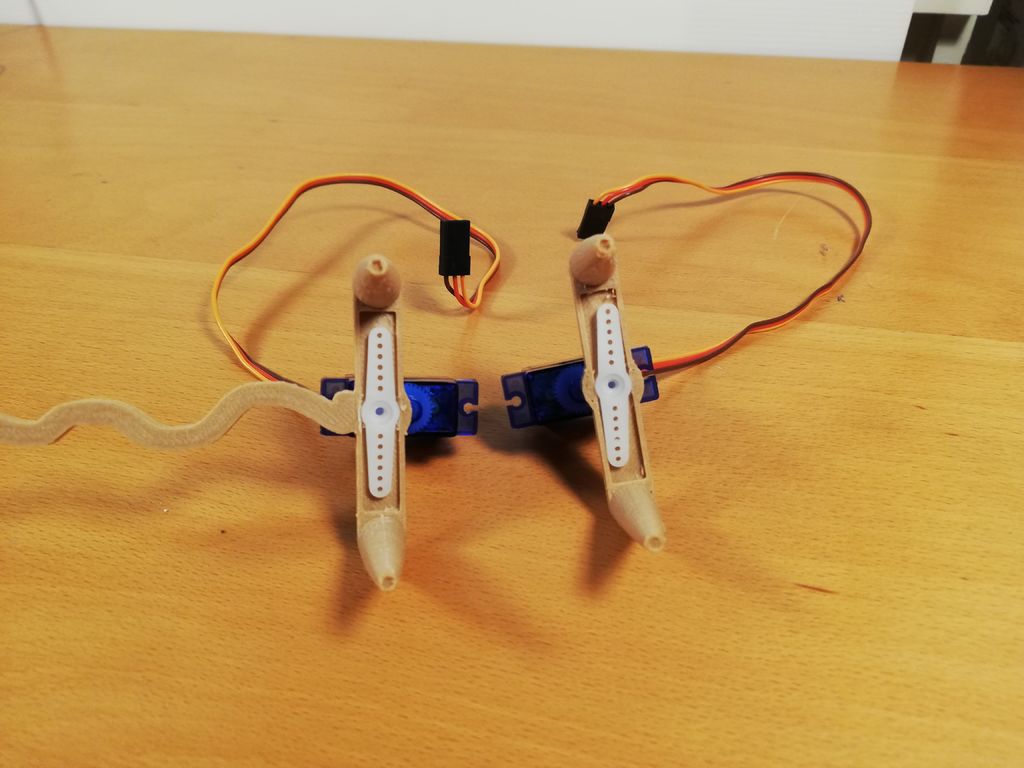
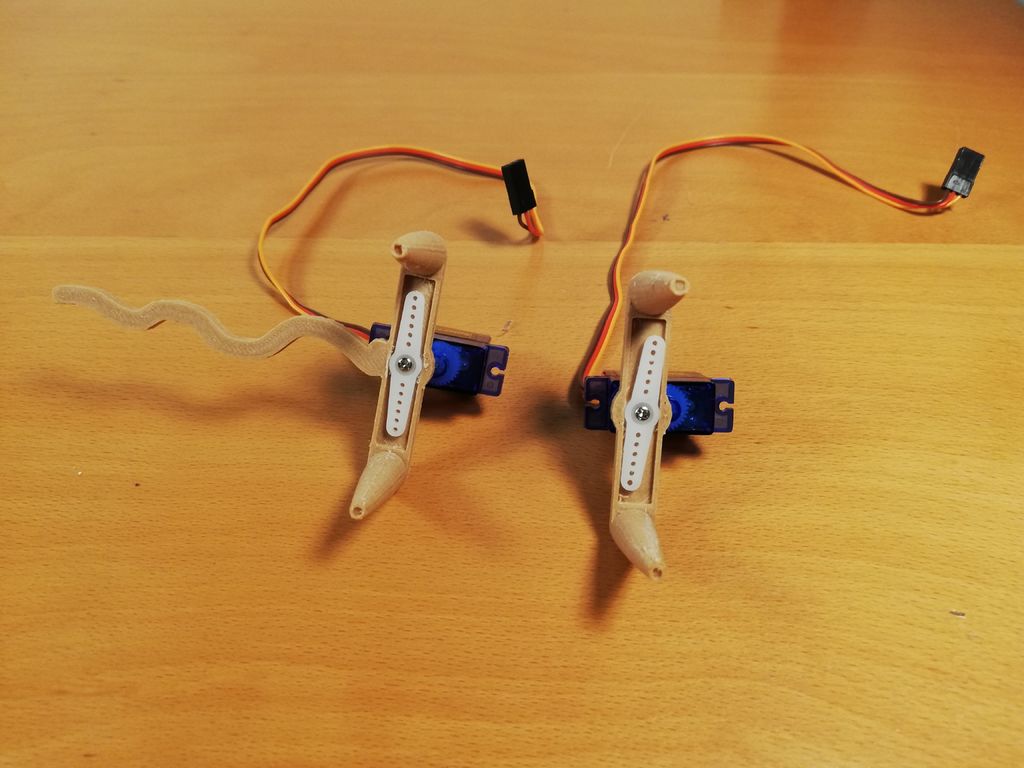
步驟4:安裝舵機
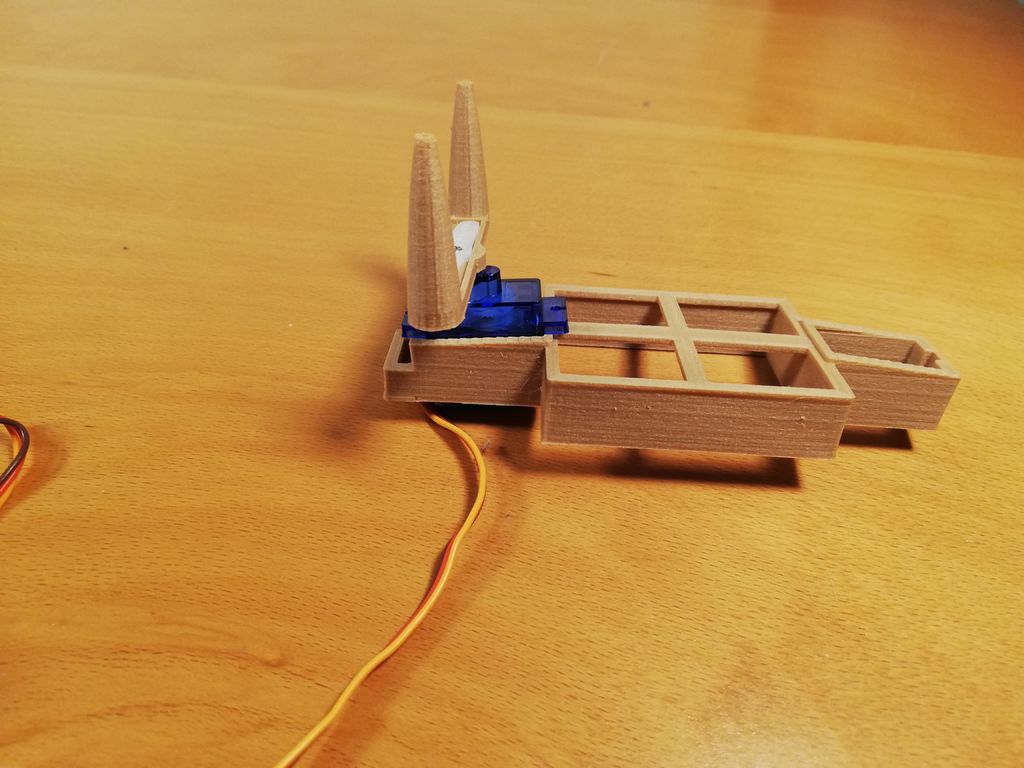
現在你必須在機器人的身體上安裝舵機,為了做到這一點,你必須用一只手拿起身體,用腿將伺服推入一個洞,你有伺服。確保伺服電線的位置正確,否則伺服不適合機箱。伺服孔的一側有一個小槽。將該插槽用于電線。
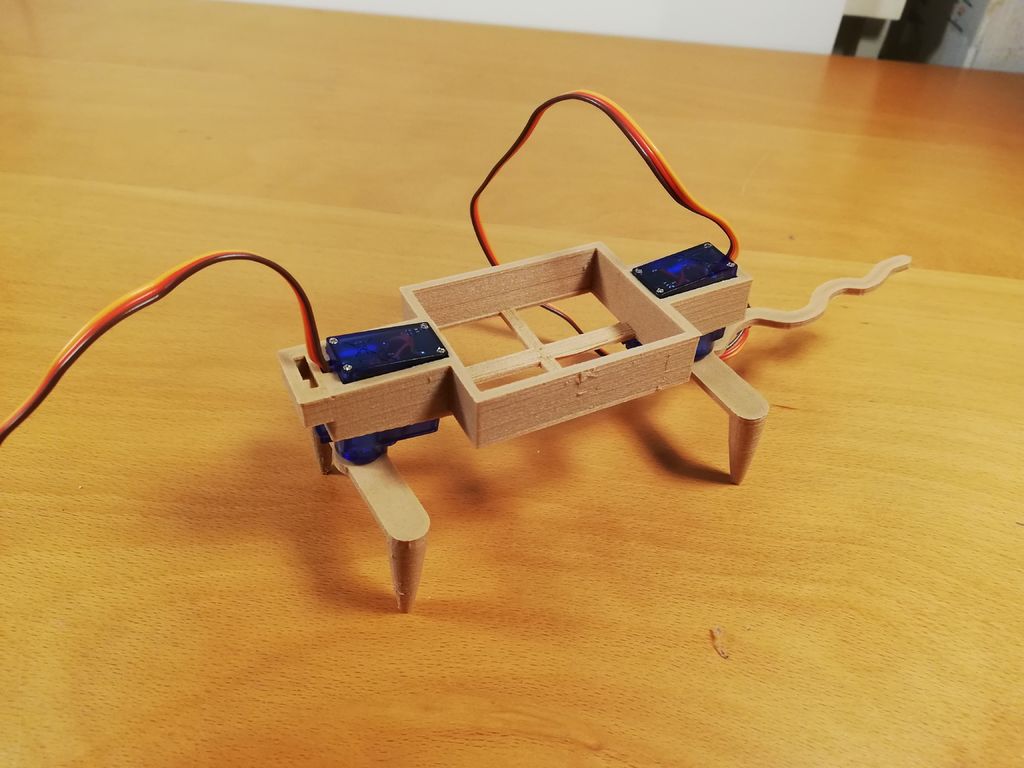
使用另一組支腳重復此步驟。
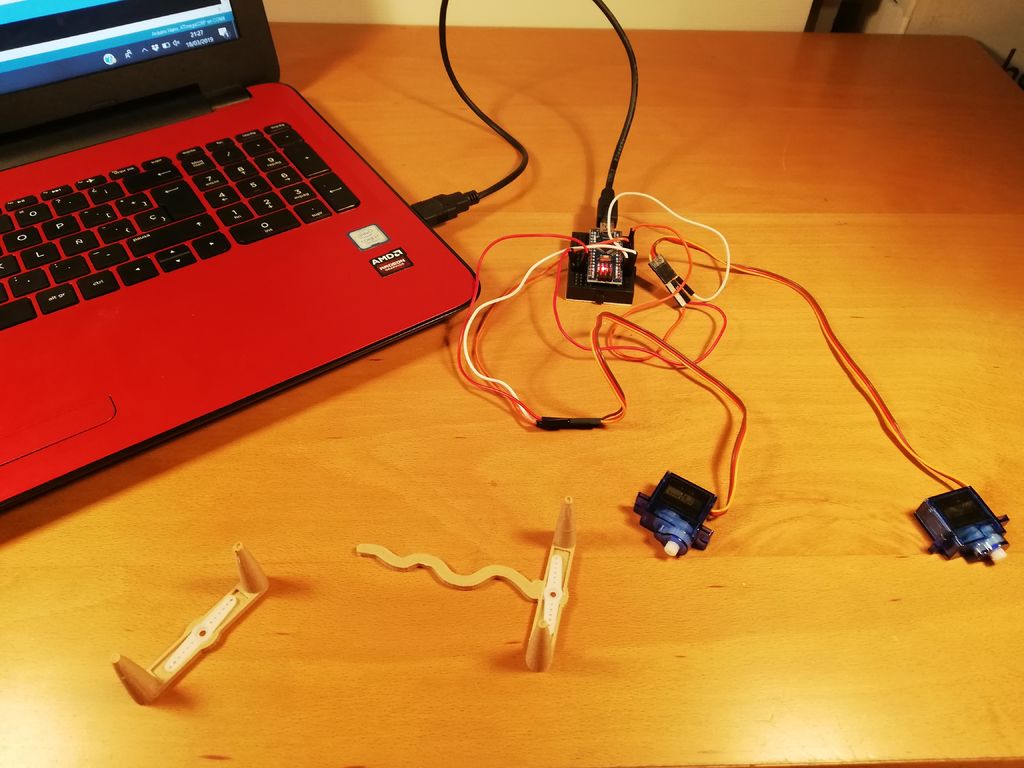
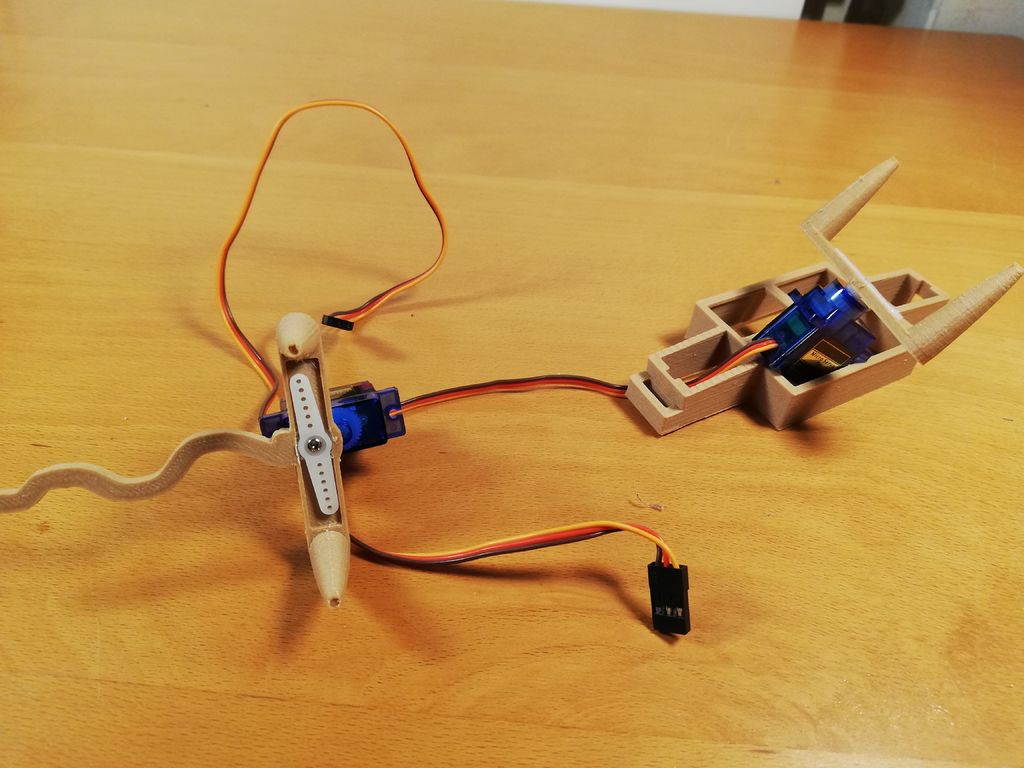
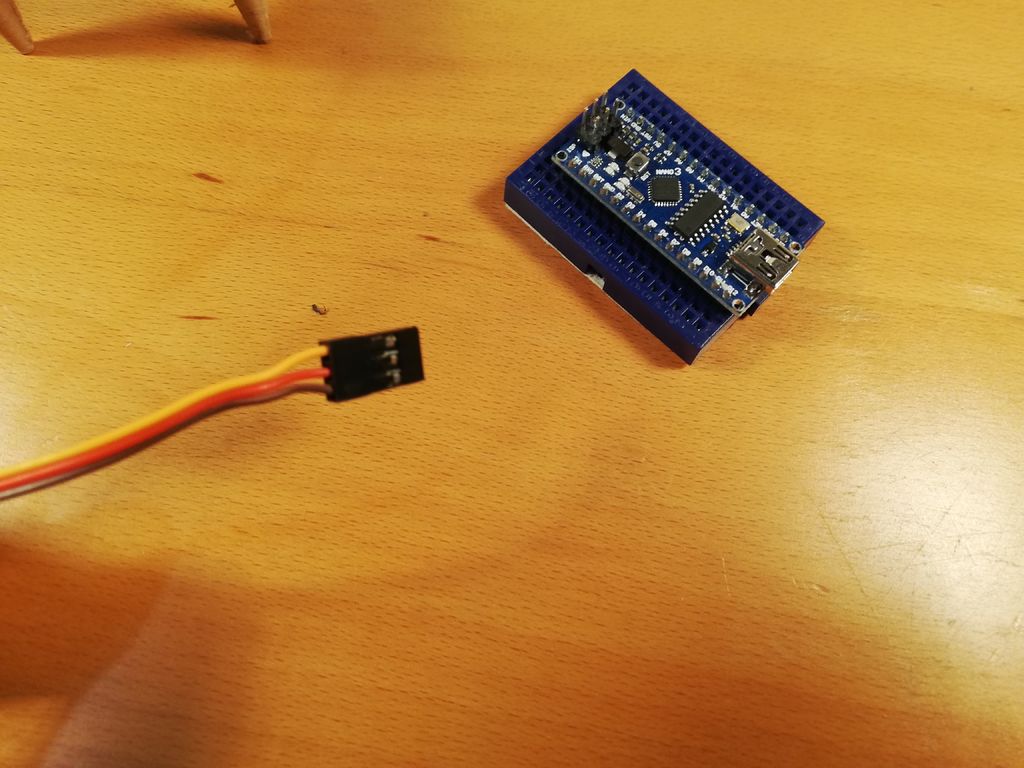
步驟5:添加Arduino
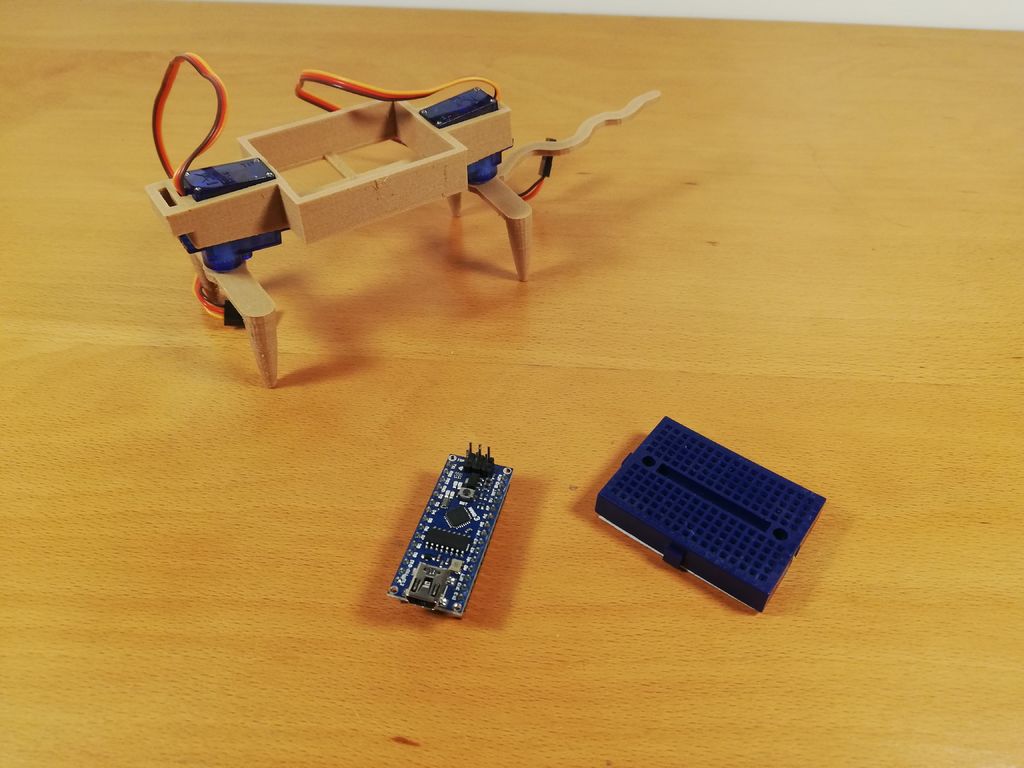
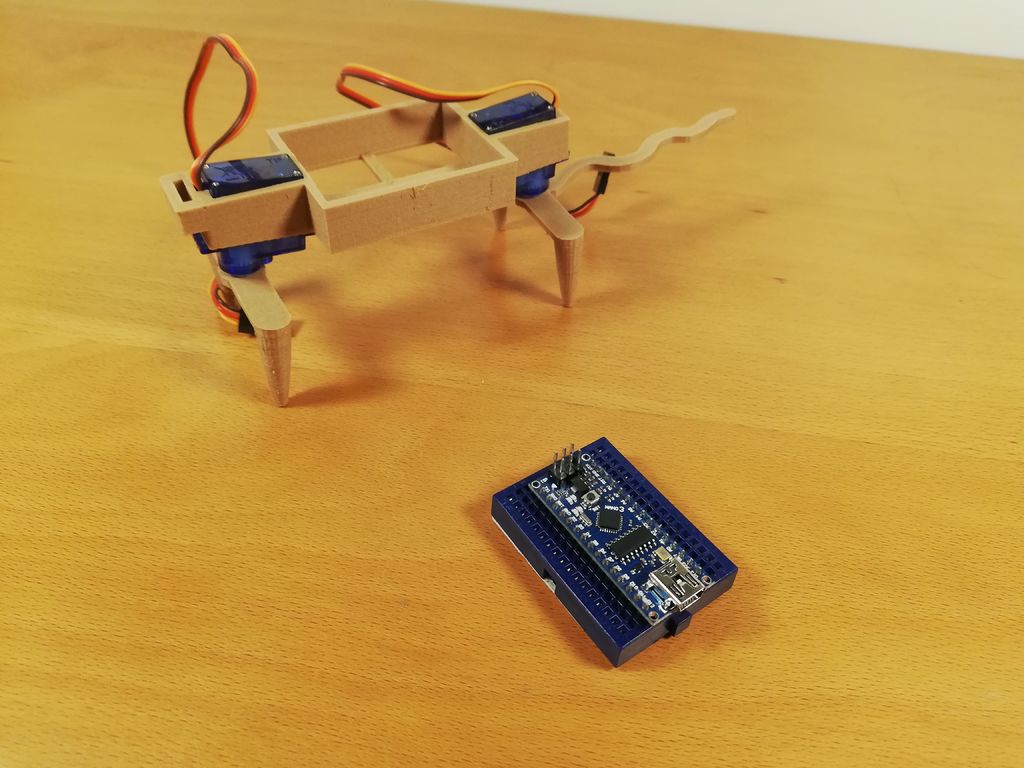
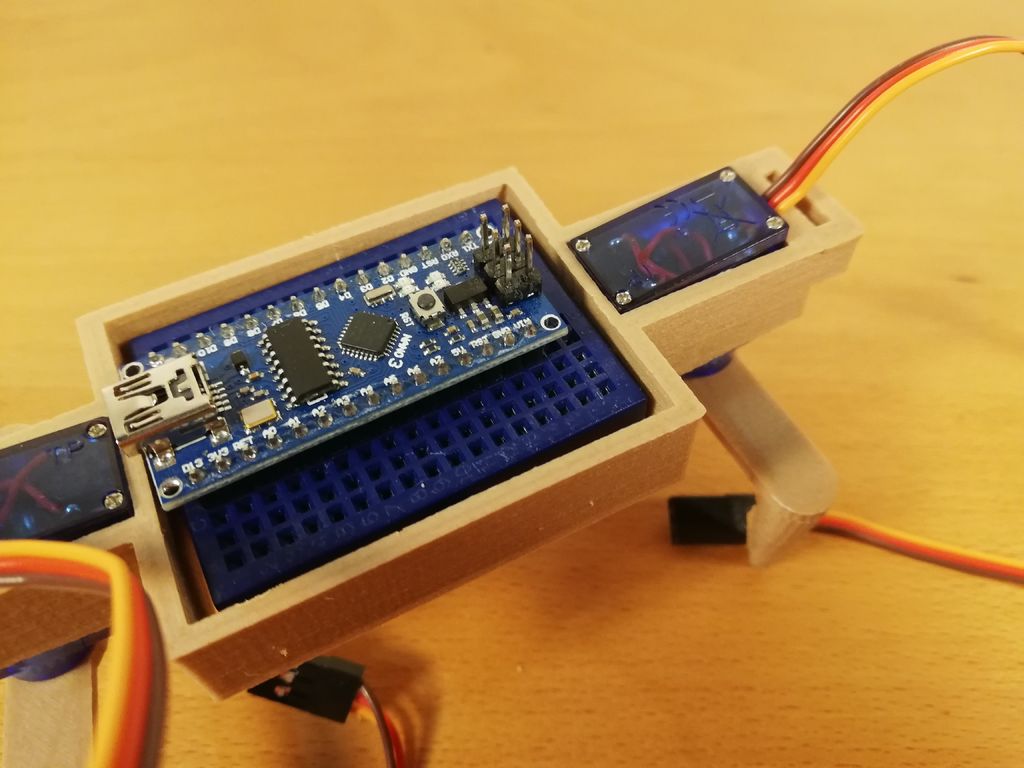
完成所有這些步驟后,您將完成機器人硬件。現在我們進入最后一部分,電子和布線。首先,拿Arduino Nano將其推入面包板,然后你必須將面包板底部的紙張取出并將面包板粘貼在3D模型中。
步驟6:接線
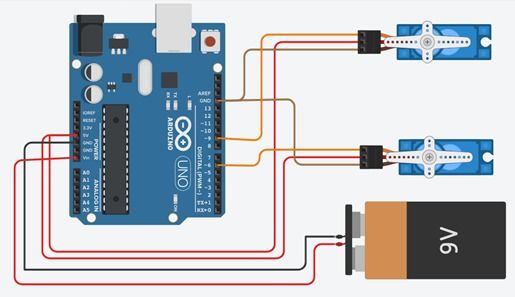
讓我們做接線!在此步驟中,您將把面包板上的所有電線連接到伺服電機。
所有伺服系統都有三條線,所以一條用于arduino發送的信息,橙色一條,另一條用于+5v電流,紅色電壓,最后是GND(或接地)電線,這是棕色的。
要連接電線,您可能需要查看我們用于使伺服器居中的代碼。在代碼中我們可以看到前腿的伺服連接到引腳D9和另一個伺服,一個用于后腿和尾部它連接在端口D6。這意味著前伺服的橙色線連接到D9引腳,后腿伺服的橙色線連接到D6引腳。兩個伺服電機的紅色電纜變為5V,兩個伺服電機的棕色電線連接到GND(Arduino Nano的任何GND引腳)。
第7步:和一些代碼
要完成機器人,你必須把它帶回來!所以這里有我最喜歡的部分,代碼。
下面,我與您分享代碼。讓你的機器人走完一個完美的大門的關鍵是修改程序,使其完全適應你的老鼠的重量和平衡,但我只推薦這個,如果你知道一點arduino的編程。如果你的老鼠掙扎著走路,寫下評論,我可以幫助你讓你的老鼠走路一些風格!
這里有你使用的代碼:
#include
Servo Front;
伺服返回;
void setup(){
Front.attach(9);
Back.attach(6);
Front.write(92);//我的前伺服,90度不完全筆直,所以我不得不將角度修改為92度。
Back.write(90);
延遲(1000);//機器人將所有腿垂直于身體并等待一秒
}
void loop(){
//此循環將一直運行到你拔掉機器人
//您可以修改移動之間的角度或延遲時間,使機器人走得更快或更慢,或者做出更大或更小的步驟
Front.write(132) ;
延遲(100);
Back.write(50);
延遲(300);
Front.write(50);
延遲(100);
Back.write(130);
延遲(300);
}
在arduino編程平臺編寫程序后,您可以將其上傳到機器人中,看看它是如何移動的。
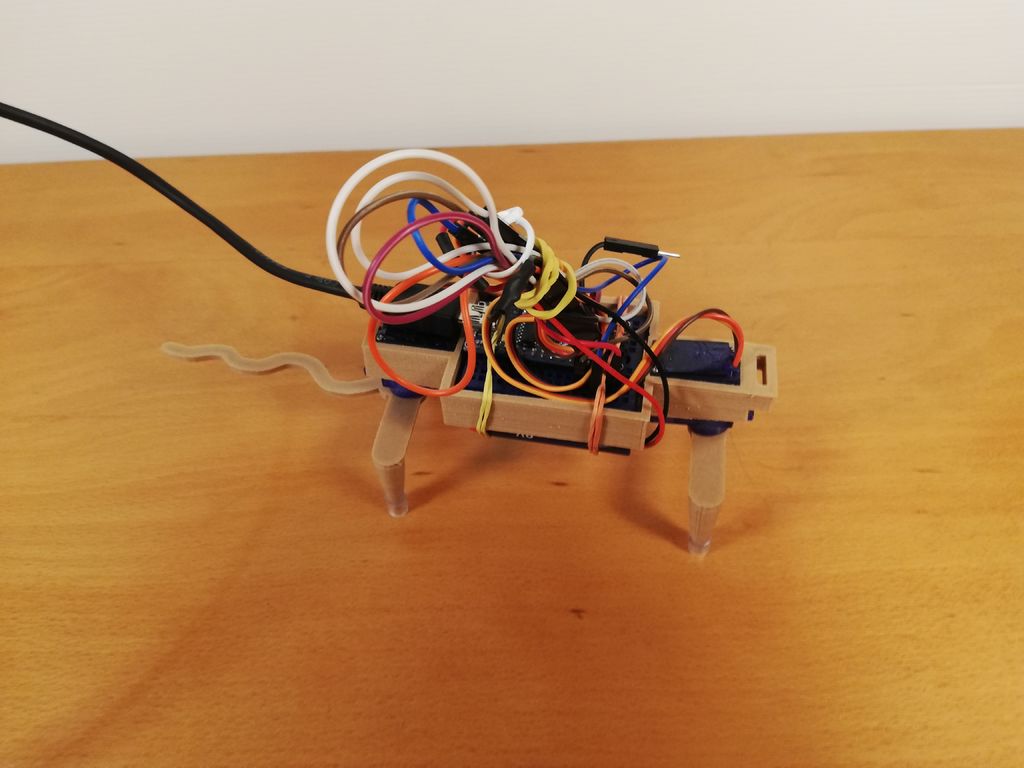
步驟8 :你完成了!
這個機器人組裝起來非常簡單,程序也很簡單。很容易讓它移動。..。..但要讓它優雅地移動會非常復雜。如果你想開始構建和編程步行機器人,這對你來說是一個很好的項目。您將學習該項目如何編寫“步態”,這是讓您的機器人行走的指令序列。
-
機器人
+關注
關注
213文章
29518瀏覽量
211662
發布評論請先 登錄





 工商網監
工商網監
評論