") 簡(jiǎn)易線(xiàn)跟隨機(jī)器人的制作
簡(jiǎn)易線(xiàn)跟隨機(jī)器人的制作
步驟1:

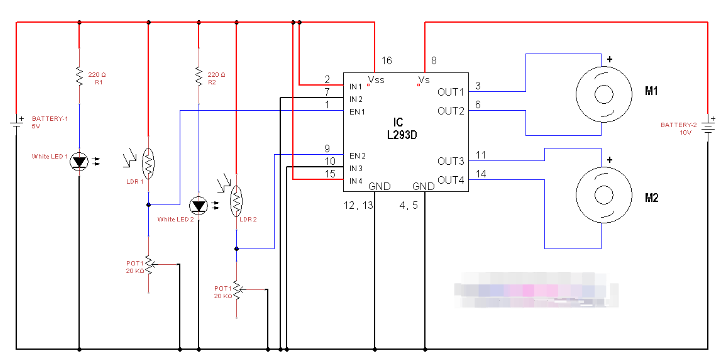
電路的功能是與光敏電阻相匹配,并為L(zhǎng)M393芯片提供合適的參考電壓。
由于黑白反射率不同,光敏電阻會(huì)發(fā)生變化。在電路中,分配給不同的電阻電壓不同。這個(gè)機(jī)器人主要用于處理這個(gè)小技巧。
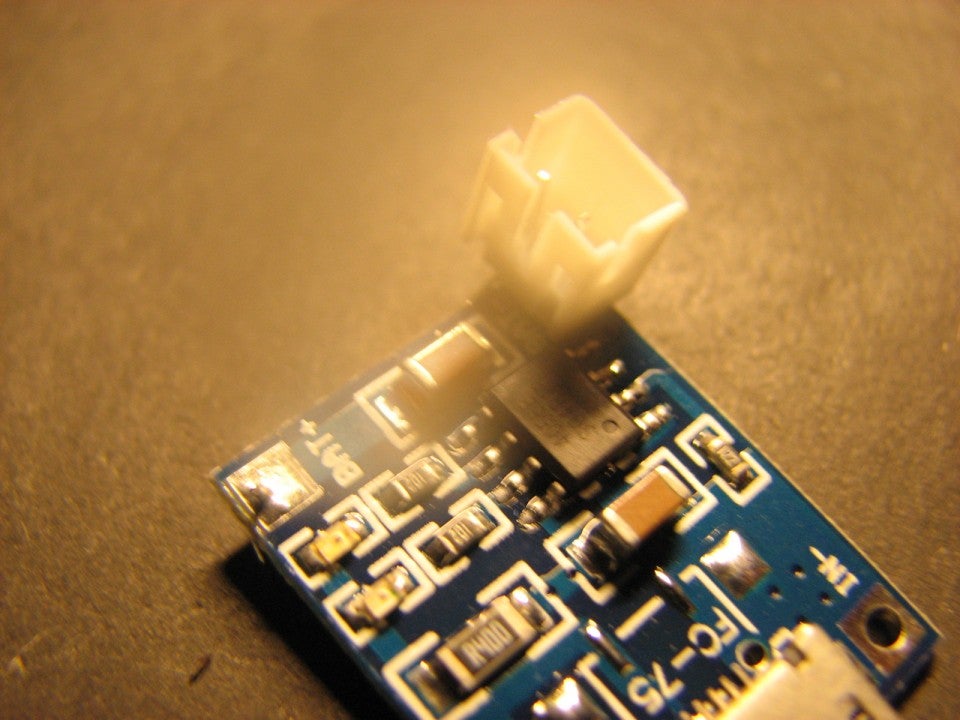
步驟2:基于LM393的控制板





led +位置和電阻
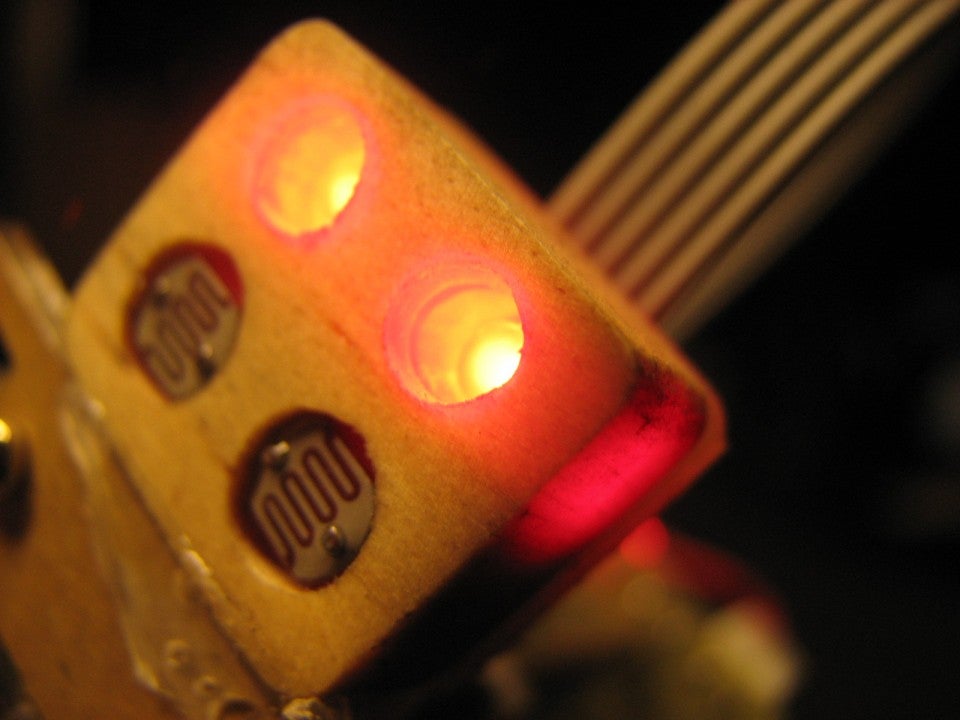
步驟3:傳感器板(LED)



LED“+”位于中間,長(zhǎng)引腳為“+”
步驟4:傳感器板(光敏電阻)





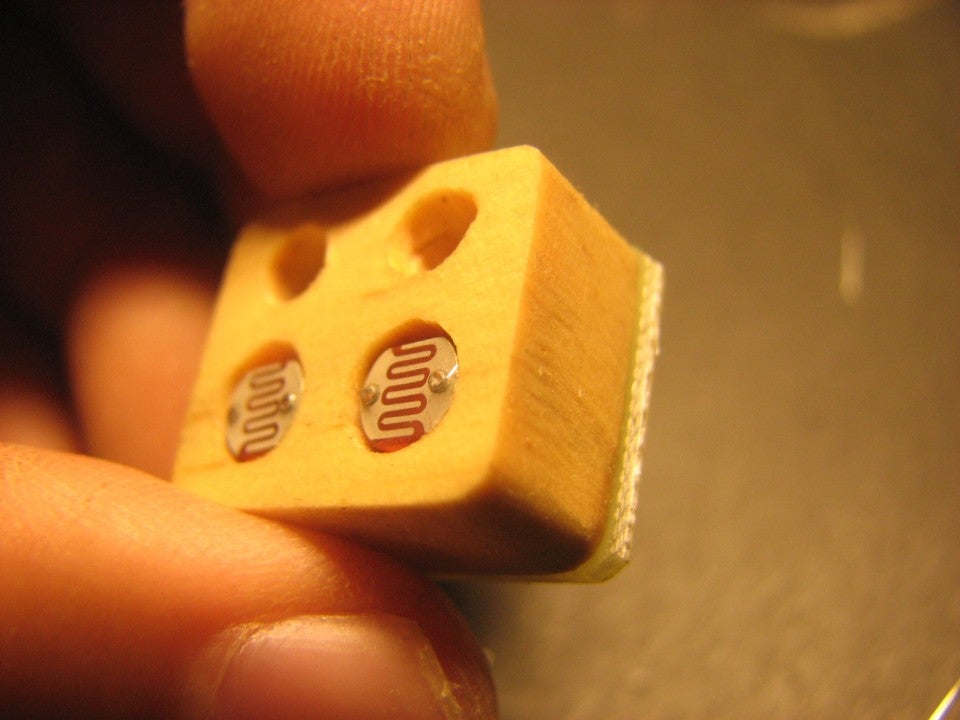

光敏電阻
由于黑色和白色的反射率不同,光敏電阻會(huì)發(fā)生變化。在電路中,分配給不同的電阻電壓
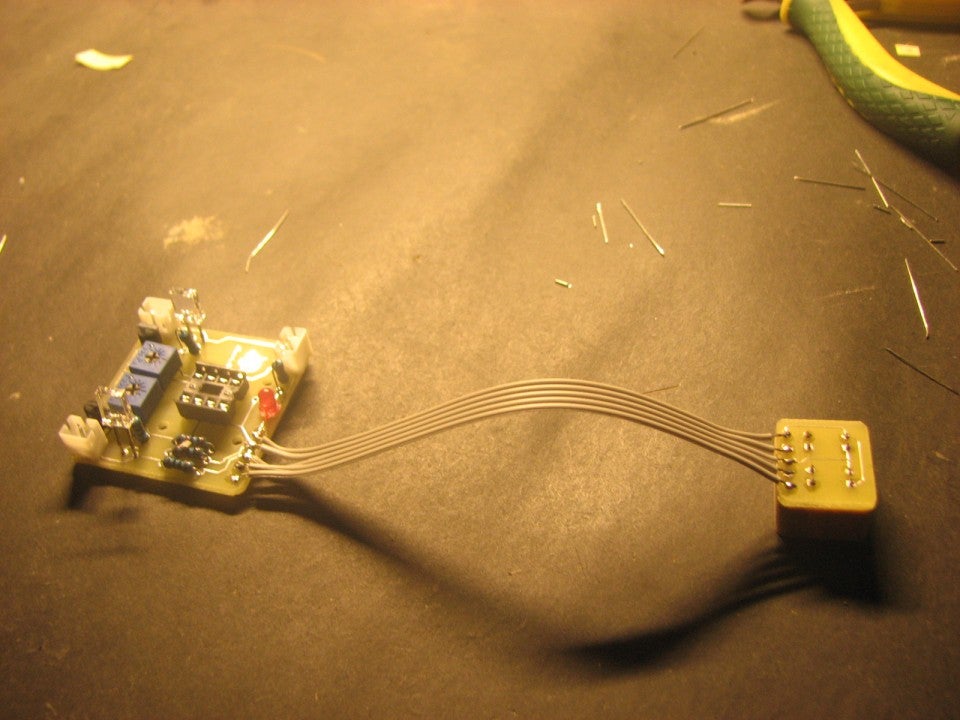
步驟5:連接主板和傳感器板




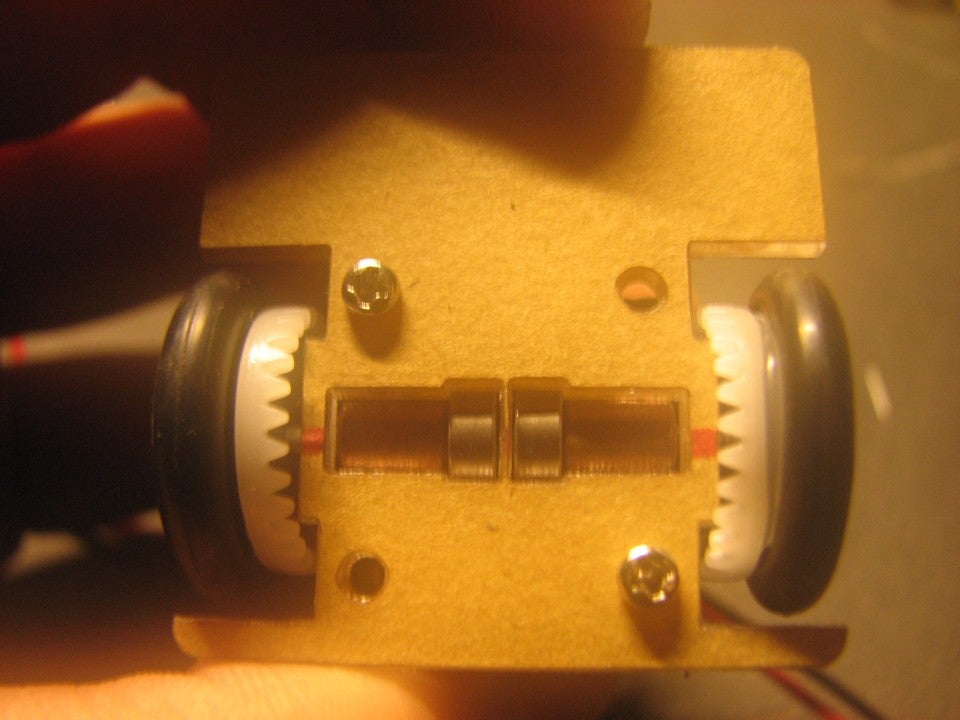
步驟6:兩臺(tái)電機(jī)



第7步:電線(xiàn)


紅色到‘+’
步驟8:機(jī)箱






底部四個(gè)螺絲,首先安裝在2的對(duì)角線(xiàn)上,最后安裝剩余的2個(gè)
輕輕調(diào)整每個(gè)螺絲的緊密度以確保底層水平
不能太硬,否則塑料薄膜的底部會(huì)被破壞
步驟9:頂部四個(gè)螺絲


右上角需要墊一張紙以防止短路
步驟10:電池和充電板


步驟11:迷你車(chē)輪

步驟12:通過(guò)膠水固定電池和傳感器



步驟13:測(cè)試




完成所有操作后
畫(huà)一條粗黑線(xiàn)1.5cm
將機(jī)器人置于頂部。
調(diào)整2藍(lán)色電位器,可以按照黑線(xiàn)運(yùn)行機(jī)器人
-
機(jī)器人
+關(guān)注
關(guān)注
213文章
29518瀏覽量
211662
發(fā)布評(píng)論請(qǐng)先 登錄
盤(pán)點(diǎn)#機(jī)器人開(kāi)發(fā)平臺(tái)
【「# ROS 2智能機(jī)器人開(kāi)發(fā)實(shí)踐」閱讀體驗(yàn)】視覺(jué)實(shí)現(xiàn)的基礎(chǔ)算法的應(yīng)用
【「# ROS 2智能機(jī)器人開(kāi)發(fā)實(shí)踐」閱讀體驗(yàn)】機(jī)器人入門(mén)的引路書(shū)
大象機(jī)器人攜手地瓜機(jī)器人打造全國(guó)產(chǎn)輕量級(jí)教育協(xié)作機(jī)械臂新標(biāo)桿

海康機(jī)器人布局關(guān)節(jié)機(jī)器人業(yè)務(wù)
名單公布!【書(shū)籍評(píng)測(cè)活動(dòng)NO.58】ROS 2智能機(jī)器人開(kāi)發(fā)實(shí)踐
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人的基礎(chǔ)模塊
開(kāi)源項(xiàng)目!能夠精確地行走、跳舞和執(zhí)行復(fù)雜動(dòng)作的機(jī)器人—Tillu
【「具身智能機(jī)器人系統(tǒng)」閱讀體驗(yàn)】2.具身智能機(jī)器人大模型
鴻蒙機(jī)器人與鴻蒙開(kāi)發(fā)板聯(lián)動(dòng)演示
開(kāi)源項(xiàng)目!用ESP32做一個(gè)可愛(ài)的無(wú)用機(jī)器人
開(kāi)源項(xiàng)目!用ESP32做一個(gè)可愛(ài)的無(wú)用機(jī)器人
Al大模型機(jī)器人
巡線(xiàn)機(jī)器人電路圖 巡線(xiàn)機(jī)器人的工作原理和應(yīng)用領(lǐng)域





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論