") 關(guān)于分布式訓(xùn)練的線性加速實(shí)踐詳解
關(guān)于分布式訓(xùn)練的線性加速實(shí)踐詳解
分布式訓(xùn)練需求
Deep Learning 在過去幾年中取得了長足的發(fā)展,尤其在語音、圖像、機(jī)器翻譯、自然語言處理等領(lǐng)域更是取得了飛躍式的提升,但與之相伴的是模型越來越復(fù)雜,參數(shù)量越來越大,例如:Inception v3參數(shù)量約25million,ResNet 152 擁有 60million 參數(shù)、VGG16 約 140million 參數(shù),Deep Speech 2 參數(shù)量更是超過300million,一些語言模型參數(shù)量甚至超過 1billion (Exploringthe Limits of Language Modeling)。數(shù)據(jù)并行訓(xùn)練方式要求每個 GPU 節(jié)點(diǎn)擁有一份完整的模型參數(shù)副本,并在融合梯度時發(fā)送和接收完整的梯度數(shù)據(jù),巨大的通信數(shù)據(jù)量給多機(jī)多卡并行訓(xùn)練帶來了極大的網(wǎng)絡(luò)通信壓力。
另一方面,越來越多的機(jī)器學(xué)習(xí)領(lǐng)域開始轉(zhuǎn)向DeepLearning比如 TTS、NLP。這意味著 GPU 集群的用戶(研發(fā)人員)數(shù)量將大幅膨脹。如何在多用戶環(huán)境下更高效的分配、利用 GPU 資源?一個辦法是計(jì)算資源以 GPU 為單位分配給用戶,而不管這些 GPU 是否在同一臺物理機(jī)上。這種分配方式的資源利用率雖高但同時也要求分布式訓(xùn)練效率要足夠高,高到可以忽略跨機(jī)通信時延。
以上兩方面原因促使我們必須尋找更高效的通信算法,最大限度釋放 GPU 集群的并行計(jì)算能力。
分布式訓(xùn)練的通信方法和問題
模型參數(shù)量的大小與計(jì)算量不是成簡單的正比關(guān)系,比如相同參數(shù)量的全連接模型和 CNN 的計(jì)算量相差了幾個數(shù)量級,但模型的參數(shù)量與分布式訓(xùn)練的網(wǎng)絡(luò)通信代價一定是正相關(guān)的,尤其是超大模型,跨節(jié)點(diǎn)同步參數(shù)通常會造成嚴(yán)重的網(wǎng)絡(luò)擁塞。
主流的 Deep Learning 框架解決參數(shù)同步的方式有兩種:同步更新和異步更新。同步更新模式下,所有 GPU 在同一時間點(diǎn)與參數(shù)服務(wù)器交換、融合梯度;異步更新模式下,GPU 更新參數(shù)的時間點(diǎn)彼此解耦,各自獨(dú)立與參數(shù)服務(wù)器通信,交換、融合梯度。兩種更新模式各有優(yōu)缺點(diǎn),為了文章不失焦點(diǎn)并限制篇幅,這里不做展開討論了,我們只列出結(jié)論:
異步更新通信效率高速度快,但往往收斂不佳,因?yàn)橐恍┧俣嚷墓?jié)點(diǎn)總會提供過時、錯誤的梯度方向
同步更新通信效率低,通常訓(xùn)練更慢,但訓(xùn)練收斂穩(wěn)定,因?yàn)橥礁禄镜韧趩慰ㄕ{(diào)大 batch size 訓(xùn)練
在實(shí)際生產(chǎn)環(huán)境中,我們通常很看重模型效果和訓(xùn)練速度,但當(dāng)魚與熊掌不能兼得時,模型效果還是更重要一些的,為此犧牲一些訓(xùn)練速度也不是不可接受,所以同步更新基本是主流方法
那么如何解決同步更新的網(wǎng)絡(luò)瓶頸問題呢?學(xué)者和工程師想出了多種優(yōu)化方法,比如結(jié)合同步更新和異步更新、半精度訓(xùn)練、稀疏梯度更新等等。限于篇幅,我們無法一一展開,在本文中,我們只介紹一種方法:Ring Allreduce。
如何搭建一套高效的分布式訓(xùn)練框架
通過上面的分析,以及日常工作中的經(jīng)驗(yàn),我們通常認(rèn)為一個理想的 GPU 集群應(yīng)包含這樣幾個特性:
1. GPU 跨機(jī)并行,達(dá)到近似線性加速比
2. 用戶以 GPUs 為單位申請資源,物理節(jié)點(diǎn)對用戶透明
3. 使用要簡單,甚至單機(jī)單卡、單機(jī)多卡、多機(jī)多卡可以由一套代碼實(shí)現(xiàn)
目標(biāo)確定了,就來看看如何搭建這樣一套系統(tǒng),我們選擇如下幾個組件:Kubernetes、TensorFlow以及 Horovod。
Kubernetes 是目前最流行的開源容器集群管理系統(tǒng),在我們的系統(tǒng)中,Kubernetes 主要負(fù)責(zé)負(fù)責(zé)集群的容器化管理,包括 GPU 資源的申請、釋放、監(jiān)控等。
TensorFlow 是 Google 大力推廣的基于數(shù)據(jù)流圖的 Deep Learning 框架,無論是使用者數(shù)量還是社區(qū)活躍程度,都遙遙領(lǐng)先其他競爭對手,在我們的系統(tǒng)中主要負(fù)責(zé)各個業(yè)務(wù)線上深度模型的搭建。
Horovod 是 Uber 新近開源的高效分布式訓(xùn)練通信框架,Horovod本身只負(fù)責(zé)節(jié)點(diǎn)間網(wǎng)絡(luò)通信、梯度融合,在運(yùn)行時需要綁定 TensorFlow 做單機(jī)運(yùn)算。
這里有兩個問題需要說明一下:
1. TensorFlow 框架本身已經(jīng)支持分布式訓(xùn)練,為什么不直接使用呢?
因?yàn)門ensorFlow的分布式框架是基于參數(shù)服務(wù)器的,這種結(jié)構(gòu)容易造成網(wǎng)絡(luò)堵塞;
并且開源版 TensorFlow 的跨機(jī)通信是通過gRPC + ProtocolBuffers 實(shí)現(xiàn)的,這種方案的問題是,首先 gRPC 本身的效率就比較差,其次使用 Protocol Buffers 序列化就意味著節(jié)點(diǎn)間的所有交互必須經(jīng)過內(nèi)存,無法使用 GPUDirect RDMA,限制了速度提升;
即使拋開性能問題,編寫 TensorFlow 的分布式代碼也是一件十分繁瑣的工作,有過相關(guān)經(jīng)驗(yàn)的同學(xué)應(yīng)該有所體會。
2. Horovod 是一個較新的分布式訓(xùn)練通信框架,它有哪些優(yōu)勢呢?
Horovod 有如下主要特點(diǎn):Horovod可以實(shí)現(xiàn)接近 0.9x 的加速比;
一套代碼實(shí)現(xiàn)單機(jī)單卡、單機(jī)多卡、多機(jī)多卡;社區(qū)活躍,代碼迭代速度快,作為對比 Baidu Allreduce 已經(jīng)停止維護(hù)了。
在接下來的兩小節(jié)中,我們將分別介紹 Horovod的核心算法和以及部署實(shí)踐。
Horovod 核心算法
Ring Allreduce ,原是 HPC 領(lǐng)域一種比較成熟的通信算法,后被 Baidu SVAIL 引入到 Deep Learning訓(xùn)練框架中,并于 2017年2月公開 。Ring Allreduce 完全拋棄了參數(shù)服務(wù)器,理論上可以做到線性加速。Ring Allreduce 算法也是 Horovod的核心,Horovod對 Baidu SVAIL 的實(shí)現(xiàn)做了易用性改進(jìn)和性能優(yōu)化。
在這一節(jié)中,我們會詳細(xì)介紹Ring Allreduce 的算法流程:。
PS WORKER 框架下同步更新方式,以及網(wǎng)絡(luò)瓶頸定量分析
我們來定量分析一下,同步更新的網(wǎng)絡(luò)瓶頸問題,以Deep Speech 2 為例:
模型包含 300M 參數(shù),相當(dāng)于 1.2 G 的大小的內(nèi)存數(shù)據(jù)(300M * sizeof(float))
假設(shè)網(wǎng)絡(luò)帶寬 1G bytes/s (萬兆網(wǎng)卡)
2 卡同步更新,需要 1.2 s 完成參數(shù) Send(這還不算 Receive 的時間)
10 卡同步更新,需要 9.8 s 完成參數(shù) Send
通過簡單的計(jì)算會發(fā)現(xiàn),在單 ps 節(jié)點(diǎn)、有限帶寬環(huán)境下,通信時間隨著 GPU 數(shù)量的增加而線性增長,很難想象一個10卡的集群每訓(xùn)練一個 batch 都需要等待 10 ~ 20s 來同步參數(shù)!通信時延幾乎完全覆蓋掉了 GPU 并行計(jì)算節(jié)節(jié)省下的計(jì)算時間,當(dāng)然在實(shí)際訓(xùn)練環(huán)境中,網(wǎng)絡(luò)速度也是能達(dá)到幾十 Gbps 的,而且通常也會多設(shè)置幾個 ps 節(jié)點(diǎn),比如每個物理節(jié)點(diǎn)設(shè)置一個 ps ,這樣可以減輕帶寬瓶頸,但這些措施都沒有從根本上解決問題。

Ring Allreduce 框架下同步更新方式
在上面的通信方式中,網(wǎng)絡(luò)傳輸量跟 GPU 成正比,而Ring Allreduce 是一種通信量恒定的通信算法,也就是說,GPU 的網(wǎng)絡(luò)通信量不隨 GPU 的數(shù)量增加而增加,下面我們會詳細(xì)說明一下Ring Allreduce 框架下 GPU 的通信流程。
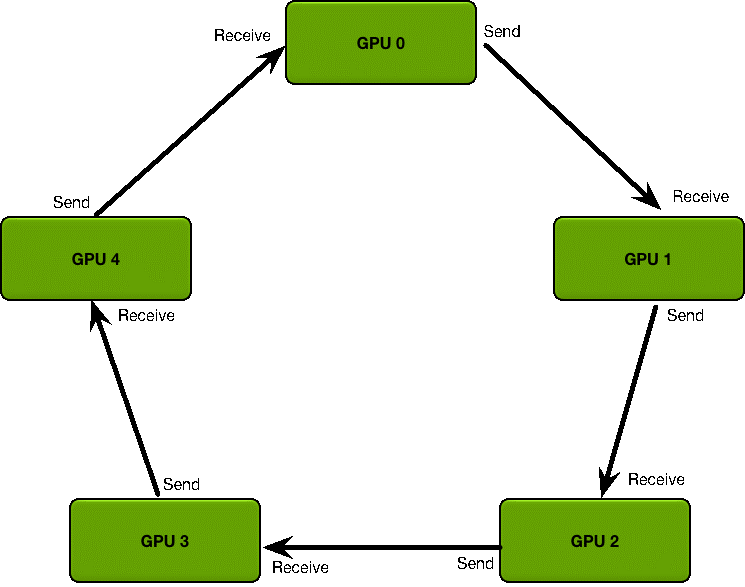
首先定義 GPU 集群的拓?fù)浣Y(jié)構(gòu):
GPU 集群被組織成一個邏輯環(huán)
每個 GPU 有一個左鄰居、一個右鄰居
每個 GPU 只從左鄰居接受數(shù)據(jù)、并發(fā)送數(shù)據(jù)給右鄰居。
梯度融合過程分為兩階段:
1. Scatter Reduce :在這個Scatter Reduce 階段,GPU 會逐步交換彼此的梯度并融合,最后每個 GPU 都會包含完整融合梯度的一部分
2. Allgather :GPU 會逐步交換彼此不完整的融合梯度,最后所有 GPU 都會得到完整的融合梯度
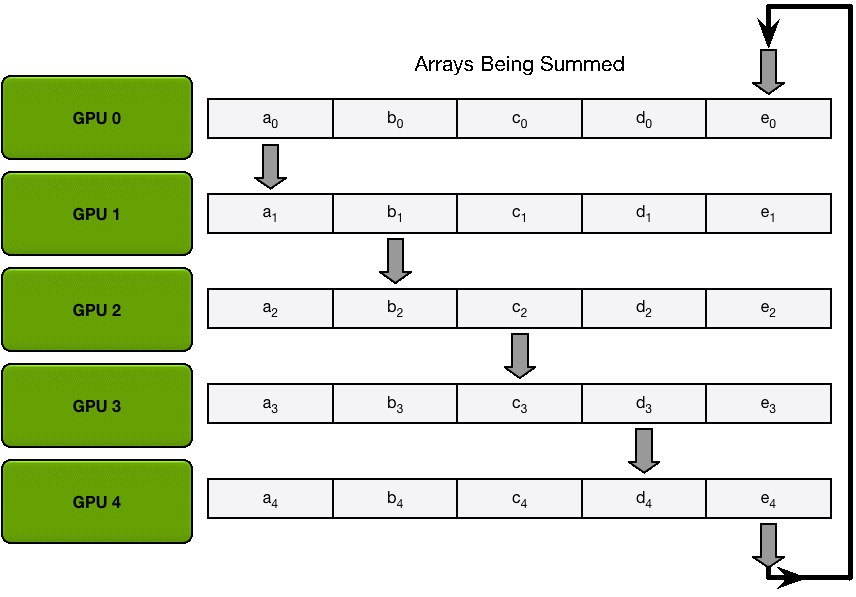
Scatter Reduce
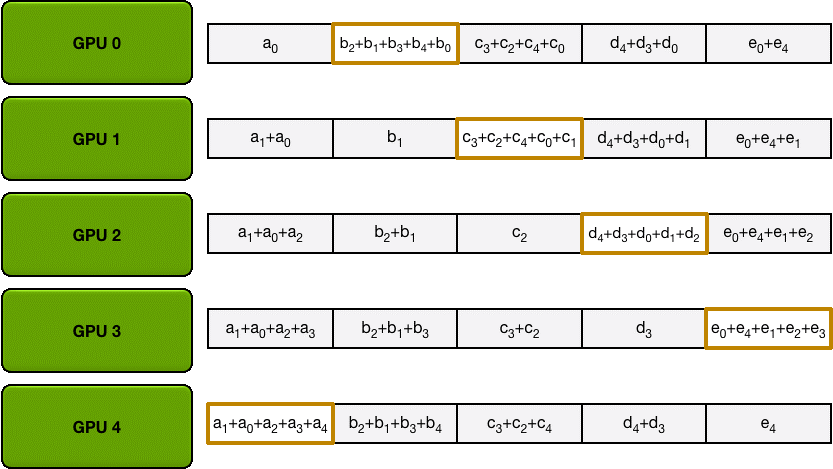
為了方便說明,我們用梯度加和代替梯度融合。假設(shè)集群中有 N 個 GPU,那么將梯度數(shù)據(jù)等分為 N 份,接下來將在 GPUs 間進(jìn)行 N-1 次Scatter Reduce 迭代,在每一次迭代中,每個 GPU 都會發(fā)送所有梯度數(shù)據(jù)的 1/N 給右鄰居,并從左鄰居接收所有梯度數(shù)據(jù)的 1/N 。同一次Scatter Reduce 迭代中,發(fā)送和接收的數(shù)據(jù)塊的編號是不同的,例如,第一輪迭代,第 n 個 GPU 會發(fā)送第 n 號數(shù)據(jù)塊,并接收第 n-1 號數(shù)據(jù)塊。經(jīng)過 n-1 輪迭代,梯度數(shù)據(jù)會像圖2 所示,每個 GPU 都包含了部分完整梯度信息。
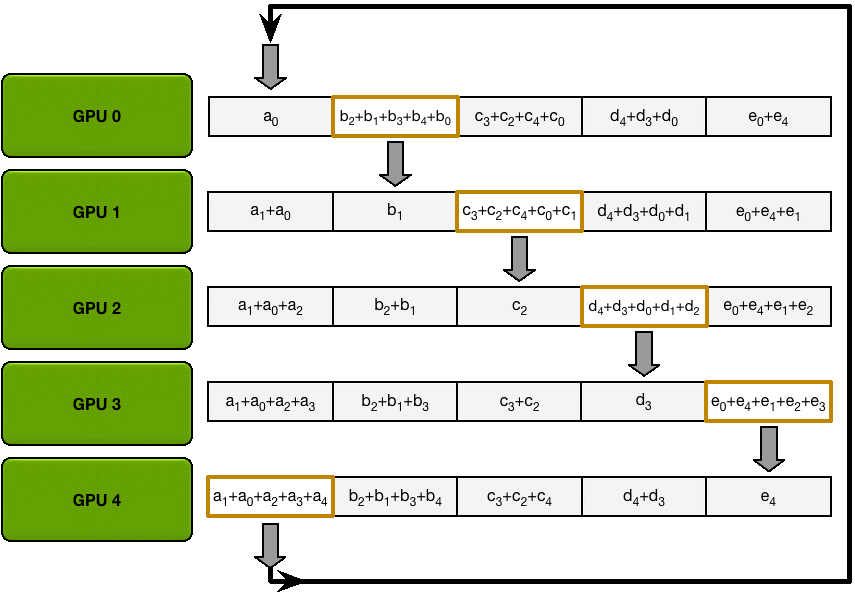
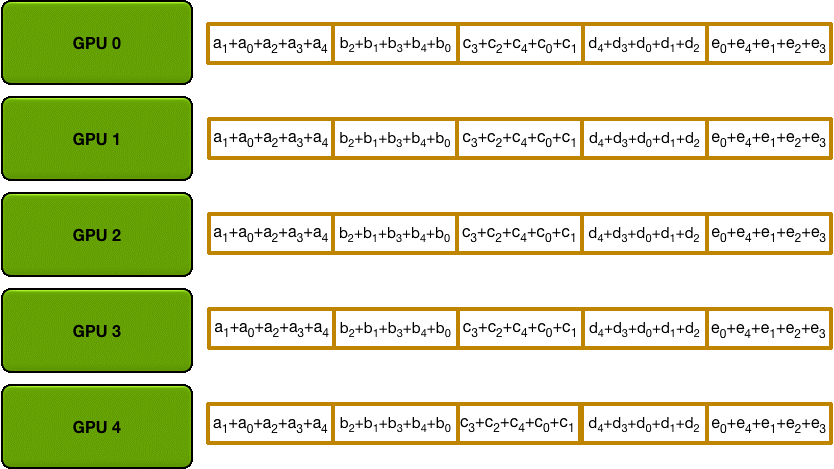
Allgather
和Scatter Reduce 階段類似,只不過這里只拷貝不求和,最終每個GPU 都得到了所有融合后的梯度。
這么做有什么好處呢?
下面我們來定量的分析一下,每個 GPU 在Scatter Reduce 階段,接收 N-1 次數(shù)據(jù),N 是 GPU 數(shù)量;每個 GPU 在allgather 階段,接收 N-1 次 數(shù)據(jù);每個 GPU 每次發(fā)送 K/N 大小數(shù)據(jù)塊,K 是總數(shù)據(jù)大小;所以,Data Transferred=2(N?1)*K/N =
(2(N?1)/N)*K,隨著 GPU 數(shù)量 N 增加,總傳輸量恒定!總傳輸量恒定意味著通信成本不隨 GPU 數(shù)量增長而增長,也就是說我們系統(tǒng)擁有理論上的線性加速能力。再回到 DS2 的例子,300million參數(shù)也就是 1.2Gb 數(shù)據(jù)量,Ring Allreduce 方式更新一次需要傳送并接收 2.4Gb 數(shù)據(jù),假設(shè)網(wǎng)絡(luò)使用 GPUDirect RDMA + InfiniBand,GPUDirect RDMA 帶寬約為10Gb/s;InfiniBand 帶寬約為6Gb/s,所以通信瓶頸在 InfiniBand 。(2.4Gb)/(6.0Gb/s) ≈ 400ms,也就是每輪迭代需要 400 ms 做參數(shù)同步,這 400ms 的數(shù)據(jù)傳輸時間是恒定的,不隨 GPU 數(shù)量增加而增加。
在 Kubernetes 環(huán)境部署Horovod
Kubernetes 是一套容器集群管理系統(tǒng),支持集群化的容器應(yīng)用,從使用角度看
Kubernetes 包含幾個重要的概念:
1. pod,pod 由一個或多個容器構(gòu)成,在問本文描述的場景下,一個 pod 包含一個容器,容器中包含1個或多個 GPU 資源
2. Services,對外提供服務(wù)發(fā)現(xiàn),后面通常會對接容器實(shí)例
3. YAML , YAML 是一種類似 JSON 的描述語言 ,在Kubernetes 中用 YAML 定義 pod 、Service 、Replication Controller等組件
4.kubectl,kubectl 是一套命令行工具,負(fù)責(zé)執(zhí)行開發(fā)人員和 Kubernetes 集群間的交互操作,例如查看 Kubernetes 集群內(nèi) pod 信息匯總kubectl get pod;查看 Kubernetes 內(nèi)物理節(jié)點(diǎn)信息匯總 kubectl get node
另外,近期我們還會有一篇詳細(xì)介紹TensorFlow on Kubernetes 的文章,所以關(guān)于Kubernetes 的詳細(xì)信息本文就不贅述了。
Build image
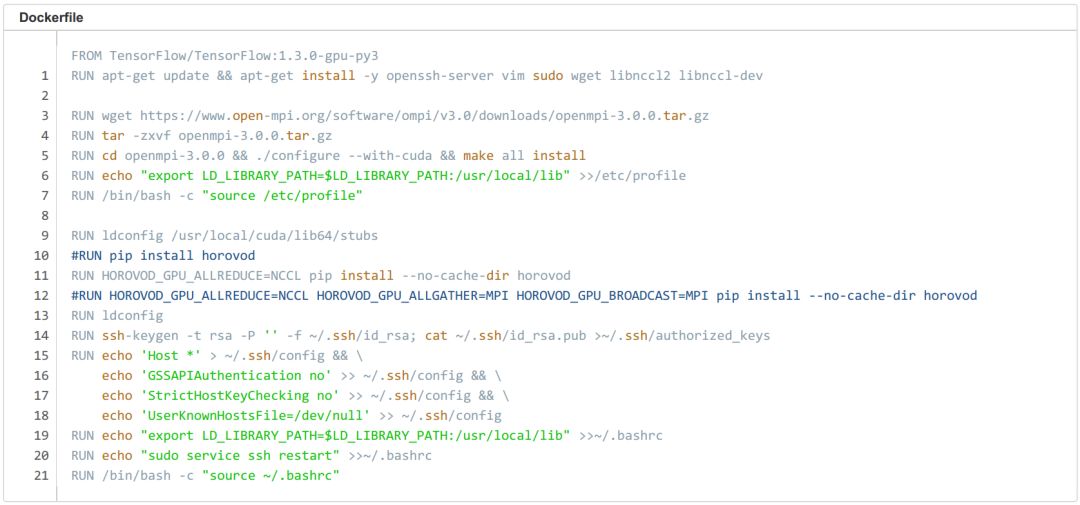
首先我們需要創(chuàng)建一個 Horovod鏡像,這個鏡像需要包含 TensorFlow 環(huán)境 、Horovod環(huán)境 、以及 OpenMPI的免密的登陸配置,我們可以選擇TensorFlow:1.3.0-gpu-py3 作為基礎(chǔ)鏡像,通過 Dockerfile 逐步安裝 Horovod環(huán)境及 Open MPI免密登陸配置。
第一步,安裝 Horovod相關(guān)依賴:apt-getupdate ; apt-get install -y openssh-server wgetlibnccl2 libnccl-dev。
第二步,下載并安裝 Open MPI,注意:如果你的網(wǎng)絡(luò)環(huán)境支持 RDMA,那你需要帶 --with-cuda 參數(shù)從源碼配置安裝:./configure --with-cuda ; make all install。
第三步,安裝 Horovod:HOROVOD_GPU_ALLREDUCE=NCCLpip install --no-cache-dir horovod,
第四步,設(shè)置 MPI SSH 免密登陸環(huán)境,方法見下面的Dockerfile。
編寫完成 Dockerfile 后,我們就可以 build 鏡像了:docker build -t horovod:v1 . 。
MPI on Kubernetes 相關(guān)問題
我們在調(diào)試過程中發(fā)現(xiàn),Kubernetes 環(huán)境運(yùn)行 Open MPI必須將 pod 設(shè)置為 host 網(wǎng)絡(luò)模式,否則 MPI 節(jié)點(diǎn)間通信時會 hang 住。host 網(wǎng)絡(luò)模式的問題在于它會占用宿主機(jī)端口號,多用戶環(huán)境下會有沖突,所以我們還需要想辦法為每個 pod 獨(dú)立設(shè)置一個SSH端口號,并通知集群里所有 Horovod節(jié)點(diǎn)。
方法詳見下面的腳本:腳本在 pod 創(chuàng)建時啟動,其中 Host** 為集群中所有節(jié)點(diǎn)的節(jié)點(diǎn)名和 SSH 端口號,腳本的最后一行作用是更改本機(jī)的 SSH端口號。這種方法可行但并不優(yōu)雅,所以如果你有其他更好的方案,請?jiān)谖恼孪路搅粞愿嬖V我。

Pod yaml
這里我們申請 2 pod,每個 pod 各 2 個 GPU ,horovod-mpi0 的 SSH端口設(shè)置為 8900 ;horovod-mpi1 的 SSH端口設(shè)置為 8901。

測試腳本及 Benchmark
·集群環(huán)境:Kubernetes,兩機(jī)兩卡,1080ti
啟動腳本:
如果將 Benchmark 整理成圖表,那么看起來是這樣的。
在普通以太網(wǎng)環(huán)境下, 2 機(jī) 4 卡相比單機(jī)單卡,Horovod 可加速 3.6 倍。
-
服務(wù)器
+關(guān)注
關(guān)注
12文章
9681瀏覽量
87257 -
計(jì)算量
+關(guān)注
關(guān)注
0文章
4瀏覽量
6928
發(fā)布評論請先 登錄
分布式軟件系統(tǒng)
LED分布式恒流原理
基于分布式調(diào)用鏈監(jiān)控技術(shù)的全息排查功能
分布式系統(tǒng)的優(yōu)勢是什么?
HarmonyOS應(yīng)用開發(fā)-分布式設(shè)計(jì)
如何高效完成HarmonyOS分布式應(yīng)用測試?
分布式系統(tǒng)硬件資源池原理和接入實(shí)踐
GL Studio的分布式虛擬訓(xùn)練系統(tǒng)關(guān)鍵技術(shù)
關(guān)于分布式系統(tǒng)的幾個問題
探究超大Transformer語言模型的分布式訓(xùn)練框架
歐拉(openEuler)的分布式能力加速舉例
基于PyTorch的模型并行分布式訓(xùn)練Megatron解析

分布式通信的原理和實(shí)現(xiàn)高效分布式通信背后的技術(shù)NVLink的演進(jìn)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論