 關于USB負載的相關介紹分析
關于USB負載的相關介紹分析
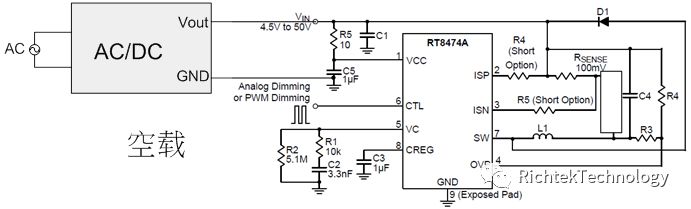
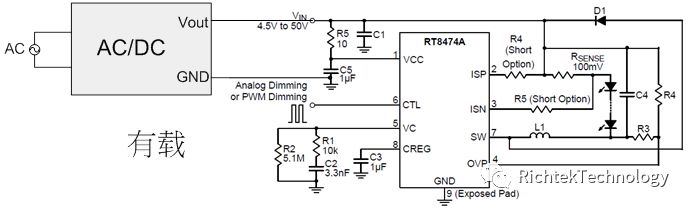
RT8474A 是輸入電壓范圍為 4.5V-50V 的 LED 驅動器,工作頻率為固定的 500kHz,集成開關管的電流限制值為 2A,支持 100% 占空比的工作狀態,可用模擬信號或 PWM 信號進行輸出調節,支持 Buck、Boost 和 Buck-Boost 架構的應用,在 Buck 架構下擁有特別的輸出過壓保護設計(可避免燒毀負載),其 Buck 應用的原理圖如下圖所示:

“先通電再接燈”,表示這個系統需要跨越兩個狀態:
這兩個狀態的轉換,在普通的電壓轉換器里會被表達為“瞬態”,英文單詞是 Transient,實際是負載的一個階躍變化。這個階躍變化會帶來什么影響呢?我隨意地打開了一份產品規格書,其中有這樣的圖片來表達此產品的性能:
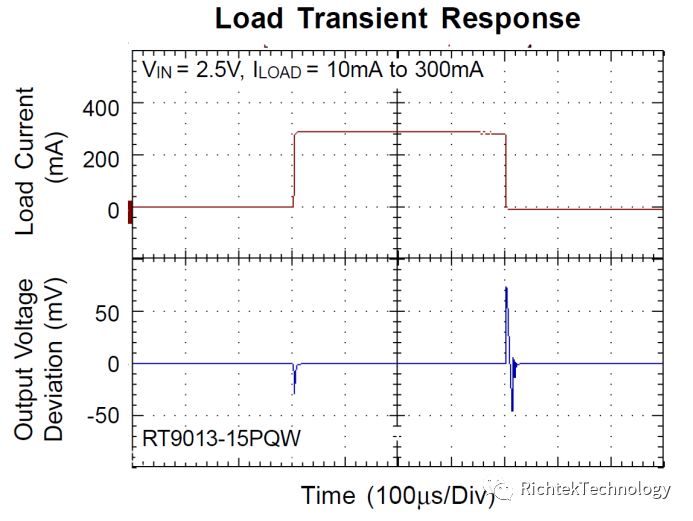
所選器件是 RT9013-15PQW,一款 1.5V 輸出的線性穩壓器,圖中的測試是在輸入電壓為 2.5V 的情況下做的,測試方法是讓負載電流在 10mA 和 300mA 之間跳變,觀察輸出電壓的變化情況。由圖可見,當負載電流從 10mA 改變為 300mA 時,輸出電壓出現了大約 30mV 的下墜,然后再回復到它原來的位置;當負載電流從 300mA 下降到 10mA 時,輸出電壓先是上升了 70mV,然后再迅速回到原位,可是它跑得太猛了,并不能在原位停下來,因而繼續下竄到低于原位大約 48mV 的地方再開始返回,隨后又經歷了一段時間的小幅度振蕩,最后在原位穩定下來。
為什么穩壓器在負載變化的時候會有這樣的響應呢?因為慣性。它們總是把自己的狀態調節到能夠滿足負載需要的狀態,可是負載要發生變化的時候并不會提前通知,它們無法在負載發生變化的同時就把狀態改變到滿足新的需求的狀態,只能在發現輸出變化以后再做出響應,這樣就出現了響應的滯后現象。調節過程本身也是有慣性的,過猛了就會沖到另一個極端去。控制回路的設計總是希望響應是快速的,回復原位的過程是可控的,最好不要有振蕩過程,這種過程被理解為穩定度不足的表現。線性穩壓器多屬于響應極快的系統,所以它們的滯后算是短的,如果是開關模式的轉換器,這種滯后就多多了:
這是表現符合車規的 36V Buck 轉換器 RT2875 的瞬態響應過程的波形圖,你可以從中看到它和前面的線性穩壓器的響應特性的區別,請注意輸出電壓下墜、上竄的幅度和回復原位所需要的時間。用于同步的時鐘、濾波電感、輸出電容都會導致響應的滯后,這是它們與線性穩壓器不一樣的地方。
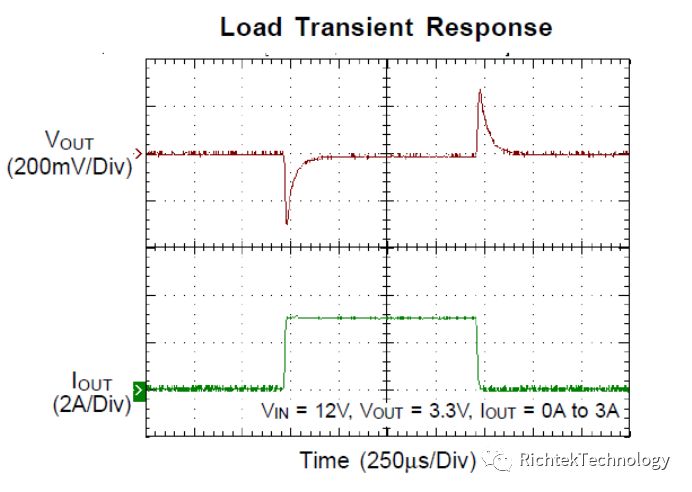
為了改善瞬態響應的特性,科學家、工程師們可沒少做努力,DC/DC 這個領域里面就有很多不同的控制架構,立锜的 ACOT(Advanced Constant On Time) 算是其中的一個成果,我們可從下圖看看其效果:
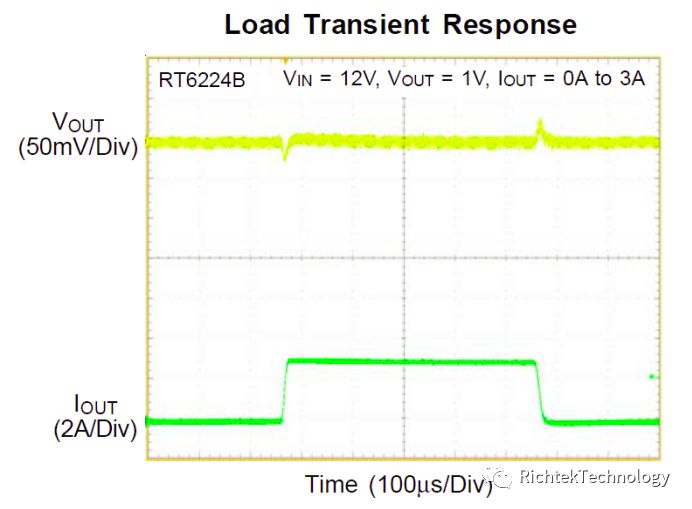
此圖來自 RT6224B 的規格書,測試條件和前者相當,負載電流都是在 0A-3A 之間跳變,但是輸出電壓更低,僅僅為 1V。在這樣低的電壓下工作的器件對電壓的變化會非常敏感,所以就會要求非常低的電壓過沖和下墜,我相信像這個圖所表達的特性是非常好的,能滿足很多苛刻應用的需求。
用來表現電壓轉換器的瞬態響應特性的圖片卻很少會在用來驅動 LED 的器件規格書中出現,親愛的讀者你是否注意到了這一點呢?這又是為什么呢?
答案其實很簡單,照明用的 LED 驅動器的負載在應用中是不變的。負載階躍在普通的 LED 照明應用中根本就不存在,我們為什么要去表現它用不著的特性呢?純屬浪費而已。因此,本文開頭提及的 RT8474A 的規格書中沒有表現瞬態響應特性的圖片就是很正常的了。
如果一顆器件的規格書不去表現它的某種特性,是否意味著它就沒有某種特性呢?答案當然是否定的,你在 RT8474A 的原理圖中看到的 VC 端及其外接 RC 電路就是用于它的瞬態響應特性調節的,你可以根據自己的需求對其進行調節,但在正式開始這一工作以前,你得對基本的控制理論有一些了解,然后你才能比較好地開展這一工作,這個問題相對復雜,我們就不在這里展開了。
繼續思考我們開始提及的問題:“輸出正極一碰負載,IC 就冒煙了。”
你可知道“一碰”這個詞代表著多少意義?這取決于你對問題思考的深度。
最淺的一層認識是負載從“無”變為“有”,只有兩個狀態:無代表空載,有代表滿載。我們小的時候看電影,最喜歡問誰是好人、誰是壞人,好在那個時候的電影把好人和壞人表現得非常直白,一看形象就知道,一聽說話就知道,一看做事就知道,好人好得非常徹底,壞人壞得淋漓盡致,習慣了這種教育以后,我們在現實中看人也是一分為二,非好即壞,非壞即好,這就給我們處理人際關系帶來了障礙,因為實際中的人不是這樣的,每個人都是有好有壞的,全看每一個當下他是如何選擇的,也看你是從什么角度去看待那一個選擇的。
如果現實中的一碰就完成了接觸,負載從空變滿也是有個過程的,這個過程就是我們前面說的階躍過程,它將導致一個響應過程(教科書中說的“階躍響應”),RT8474A 的占空比將從一開始的全開狀態逐漸演變為等于 Vout/Vin 的狀態,其間經歷的過程是怎樣的,取決于 RT8474A 所處的環境,它的輸入、負載的規格、所有外圍元件參數都與之相關。最佳的結果大概是這樣的,它的負載電流逐漸從 0 上升到預設的額定電流,沒有抖動,沒有折騰,實現這點還需要前端 AC/DC 的配合,確保其輸出總是能夠滿足它的調節過程的需要,但事情常常不會這么順利,因為 AC/DC 在遇到這樣的負載變化的時候也有一個響應過程,而我們此前并不知曉它的特性是怎樣的。
這樣的不理想的理想結果是我們從最簡單的二元分別的假設出發推導出來的,如果我們去觀察事實,我們會發現實際的“一碰”根本就不是一個簡單的過程,它可以復雜到可能根本無法分析下去,最后還得想辦法對過程、分析進行簡化,所以下面就直接簡化地對事情進行描述。
當負載靠近輸出正極還沒有真正接觸的時候,兩者之間的空間電場將逐漸加強,到了某個時刻,極高的電場強度將使兩者之間的空氣發生電離,空氣阻抗將因離子態的出現而急劇下降,在尚未真正接觸的兩個端子間形成實際的電流通路,負載電流急劇增加。這個過程通常能看到火花的出現,我家有個侄子小時候曾將一節干電池的兩個電極用金屬線短接,當時只看見火花一閃,他的指頭上便留下了一道燒焦的痕跡,由此可見這一下釋放的能量有多厲害。
當真正的接觸實現以后,電路繼續工作,負載電流繼續增加,但在這時已經接觸的兩個端點又會再次分開,這是由于接觸碰撞的反彈造成的,這種分離可能造成電流中斷,斷開之后又會重新續上,而且可能反復很多次,RT8474A 將會在此過程中不斷變換其占空比,努力使其電流檢測電阻上的電壓等于額定值。
玩過單片機的朋友在學習編程的時候大概都做過開關按鍵消抖軟件,一般的教程里都有這樣的開關接觸過程的波形示例:
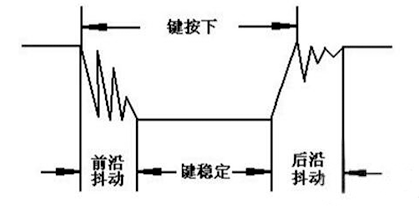
一個在設計上已經努力進行了消抖處理的按鍵都還要這樣抖動,你用手工隨意去進行兩個觸點的接觸會帶來什么樣的抖動效果呢?真的是難以預估的,好思考的讀者可以順便想想為什么波形要畫為鋸齒形狀。
對于 RT8474A 來說,負載的接入便意味著負載的增加,負載的斷開便意味著負載的減小,但它并不在乎這一點,它只有一個目標:讓輸出電流等于設定值。堅持自己的目標,這無疑是值得稱道的一種執著,可是當負載反復通通斷斷的時候,這種執著將給它帶來災難,因為它的占空比即使到了最大化也可能不能得到它想要的結果,最后就會在它堅持占空比最大化的時候有它不能承受的電流流過它(即使IC有過流保護也無法保證電流不會過流,因為從檢測到過流到保護的實現是需要時間的),最后因為過熱而燒毀了。
RT8474A 的輸出電流的反復變化必然反映到它的供應電壓上,前端的 AC/DC 也會進入反復無常的運作狀態,其輸出電壓高過 RT8474A 的耐壓是很容易的事情,這時候將發生什么狀況呢?想進一步探討的讀者請在歷史消息里去查看過去的文章:EOS 是怎么回事?
在上述的這些事情發生期間,負載的通斷、RT8474A 的運作和 AC/DC 的運作既是各自獨立的,又是相互影響的,要把責任推到任何單一的因素上都是不可取的,怕的就是當一個操作帶來的沖擊正在被修復的時候,另一個沖擊又到來了,系統認為此前的修復行為過了頭或是嚴重不足,所以它只好往另一個方向進行修復或是在原有的方向上進行更深的修復,這樣就會在反復中將系統帶向不可挽回的深淵。作為一個測試者,你的責任就是確保不要這樣做,因為這樣的測試對現實沒有任何幫助,哪個用戶會把燈具中的 LED 動來動去的呢?但是作為設計師卻有責任將電路的響應特性調節到比較好的狀態,使它能在負載有一定的變化時能夠進行穩定可控的調節,我們進行瞬態響應測試的意義便是幫助這個過程的完成,有這種需求的讀者可以購買立锜的 Load Transient Tool 來幫助自己完成這種測試。
寫完此文的時候,我想起了當年研究 LED 在 MR16 應用中的歷程。早期的各種解決方案在面對電子變壓器的時候都存在各種不確定性,因此兼容性和閃爍問題總是解決不了,我們找到的 Boost + Buck 架構就是將問題分段來處理的:Boost 的存在既解決了電子變壓器的穩定工作問題,又給后級的 Buck 提供了穩定的工作環境,因此一勞永逸地解決了所有問題,對此有興趣的讀者可以去研究 RT8476 和 RT8479。
-
負載
+關注
關注
2文章
604瀏覽量
35007 -
驅動器
+關注
關注
54文章
8635瀏覽量
149073 -
輸入電壓
+關注
關注
1文章
890瀏覽量
16939
發布評論請先 登錄
USB微型頻譜分析儀模塊介紹
如何利用EPR分析USB PD?
關于晶振負載電容的探討

電子負載的動態負載模擬


關于USB連接器的發展歷程分析

交流回饋老化測試負載的詳細介紹


電機負載特性介紹
nginx負載均衡配置介紹

USB協議分析儀的技術原理和應用場景







 工商網監
工商網監
評論