 Dexmo力反饋手套的創造史,以及力反饋交互的原理、常見誤區,以及應用場景
Dexmo力反饋手套的創造史,以及力反饋交互的原理、常見誤區,以及應用場景
交互是VR、AR體驗中極其重要的部分,它直接決定沉浸感的程度。至今為止大大小小的公司在五感的還原上不斷探索,視覺和聽覺已經較為成熟,而觸覺、嗅覺、味覺仍在初步探索階段。
谷逍馳(Aler Gu),Dexta Robotics(岱仕科技)CEO, 自2014年起,其致力于開拓現代VR/MR的交互技術,并研發出了力反饋手套Dexmo,目前已經應用于虛擬仿真、工業等領域。
谷逍馳是Dexmo力反饋手套的主創者,也是一位狂熱的全棧機器人科學家、人機交互研究者,他曾就讀于劍橋大學機械控制工程專業。本文中,他將分享Dexmo力反饋手套的創造史,以及力反饋交互的原理、常見誤區,以及應用場景等。
以下為第一人稱自述 :
Hi,我是DextaRobotics的CEO,AlerGu(谷逍馳)。自2014年以來,我們一直在探索VR/MR中的人機交互方式,致力于尋找適用于所有人的最自然直覺的解決方案。我們一直在努力讓力反饋手套成為現實。
Dexmo讓人們在VR中獲得最自然直覺的交互體驗
(以上為參考圖,實際使用中需搭配6自由度空間定位器)
由于部分讀者尚不了解我們的產品,我先向大家介紹一下:Dexmo是一款商業化便攜式雙手無線力反饋手套,兼具手部動作捕捉與力反饋功能,可廣泛應用于工業培訓、教育科研、醫療康復、游戲社交、仿真建模、汽車、航空航天等領域。Dexmo是最易于使用的力反饋手套,為研究者、企業、消費者而生。它所提供的自然、直覺的觸感可以讓每一個人無縫觸碰真正沉浸式的VR世界。
現在四處常見各種精美的技術概念演示。與它們相比,Dexmo的特別之處在于它的完成度遠遠高于一個概念。它不僅僅是可以工作的原型機,而是體驗優秀,并已經投入大批量生產的產品。我們正在將這項技術進一步推向大眾。
在介紹產品細節之前,我想先給大家分享我的一些想法,包括我們為什么要做這件事、交互在VR中的重要性、我們前進的動力,以及產品的最新進展。
Dexmo力反饋手套的產品宣傳圖
項目的開端
在2013年我第一次看到OculusRift的時候,我為它的概念感到振奮不已,見到它的發展,我開始意識到這遠不僅僅是個游戲配件,而是朝著未來媒介新篇章邁出的第一步。我們回顧信息傳播媒介的發展歷史:從寫信開始,到傳送照片、印刷報紙,再到聽廣播、看電視、使用個人電腦、智能手機,人類已經走過一段漫長的道路。在歷史的演進中,技術的進步令我們能夠以不斷增長的信息密度進行溝通。人類持續全力發展技術,創造盡可能還原我們現實生活中交互方式的體驗。
但是現今的技術能夠讓遠距離溝通變得跟面對面交流一樣嗎?答案是不能。他們并不能看到彼此的肢體動作,也不能親手拿起東西遞給對方,這里還有很多需要改進的地方。每當一項逐漸完善的技術媒介成熟時,就將徹底改變幾代人的生活。將一切由2D轉換為3D的VR/MR技術是我們必將迎來的合理發展,但它究竟將以何種形式落地呢?
很多人致力于研發頭顯,但要想獲得完全沉浸式的體驗,只有優秀的頭顯是不夠的,還有一些同樣重要的問題需要解決。我們都見過那種傻乎乎的圖片:有人帶著頭顯,雙手在面前比劃,但其實根本這雙手根本沒有被帶進VR里。我意識到這里明顯有所缺失,那就是手部設備,手是我們思想的延伸,能夠使最自然的人類互動成為可能。
這才是在VR中使用雙手時該有的樣子
不僅僅是我自己,很多VR愛好者曾告訴我,他們不僅想在VR中使用自己的手,還想感受自己所抓住的物體,可惜這樣的技術當時并不存在。當時最接近這樣需求的產品大多要通過電纜連接遠在另一端的電機箱,它們體積龐大又過時,難以制造和維護,而且對普通消費者來說過于復雜。
我一直對機器人技術充滿熱情,我喜歡挑戰。因此,我覺得有責任用自己對技術的理解尋找答案:別管過去的數據手套,對消費者友好的力反饋手套到底應該是什么樣子呢?有了這個想法后,我們從頭開始重新設計一切,這就是Dexmo項目的開端。
為何交互很重要
當個人電腦剛被發明出來的時候,它只是少數人使用的酷玩意,當時人們得先知道怎么用命令行才能使用電腦。直到鼠標和圖形用戶界面(GUI)被引入系統,讓沒有任何技術背景的人也可以使用PC后,PC才開始進入主流市場。假如Win3.0沒有這么友好的用戶界面,很難想象它還能不能賣出400多萬套。
在iPhone問世之前,市場上已經有數十家企業嘗試推出智能手機,但由于價格昂貴、使用方法復雜,所以并未引起廣大普通消費者的注意。然而,iPhone憑借其令人驚嘆的觸摸屏和基于觸摸的GUI界面獲得了成功。當一個五歲的孩子不必閱讀使用手冊,只要用手指隨意滑動就能開始玩游戲時,你就知道iPhone在降低學習成本方面取得了巨大的成功。
VR/MR也面臨著同樣的問題。新的媒體技術必須真正“易于使用”,才能進入大眾市場,但找到最合適的方法并不容易。盡管我很欣賞手柄,但它還不夠簡單和直覺。資深游戲玩家自然都知道如何使用手柄,但如果是新手,則可能需要很長時間才能習慣按鍵和搖桿的控制。那我們該怎么解決這個問題呢?
當iPhone問世時,喬布斯有段名言:
“不管你需不需要,它們(市面上的其他智能手機產品)都會配置鍵盤,不論你是否真的需要它們。
它們對每個軟件程序來說都一樣毫無變化,因為這些實體鍵盤和控制按鍵都被固定在塑料上了,。但其實每個應用都需要一點獨特的用戶界面,針對不同應用,需要對鍵盤進行一些針對性優化改變。 但是如果六個月后你想出一個好主意想添加進產品里,你不能再繼續加一個按鍵了,因為產品都已經發貨了。
那該怎么辦?
無解,因為按鍵和控制系統不能調整了,它不能為每一個應用程序而改變,他未來也不能被再加入整個系統,即便將來你想到另一個好主意想加入這個產品。”
VR與其他產品的人機交互(HCI)發展對比
我認為這與當前VR的發展情況非常相似。手柄有固定的按鍵和搖桿,只能非常有限地部分重建手部交互的體驗。開發者必須根據特定的手柄硬件來調整他們的應用程序,而不是直接根據我們使用手的自然習慣在不同的應用程序中構建不同的交互方式。用戶必須首先學習如何使用硬件才能使用應用程序,這就限制了市場的增長,更使得開發者越來越難以賺錢。
在軟件生態系統中有一個眾所周知的悖論,即“先有用戶還是先有開發者”。在過去的幾年里,我思考了很久,得出了一個結論:先有用戶。每當一個新的生態系統誕生時,如果它不能吸引足夠的用戶,那么從長遠來看,開發者就不會有足夠的動力繼續為這個平臺開發。Surface RT就是一個典型的反面案例,Oculus在早期也是如此。關鍵在于降低用戶進入這個系統的成本,當用戶不需要花費學習成本就可以加入平臺時,即使只有幾個應用程序,他們也會加入,因為對于用戶來說平臺的吸引力大于阻力。和iPhone剛問世時的情況類似,iPhone的界面和使用非常直觀明了,以至于那些認為自己不需要智能手機的人也開始使用它。簡單的游戲可以幫助開發者賺取數百萬美元,這會鼓勵更多開發者加入。這也是VR所需要的生態系統,這就是為什么我堅信我們能夠幫助VR行業形成這樣的生態系統。
舉個例子,想象你在現實生活中打開一張地圖,你會怎么做?你將從背包里拿出地圖,然后打開來看。這種體驗其實可以通過合適的交互技術實現,而在當前的VR硬件條件下,這就變成了:“按下手柄側面的抓握鍵打開菜單,然后用另一個手柄上的光束瞄準菜單里的地圖選項,然后按下扳機鍵確認你的選擇。” 這本該是個簡單的操作,卻由于目前硬件的限制而變得很復雜。
其實從工程學角度來看,這是有道理的。因為打造性能穩定的手柄要比創造力反饋手套容易得多。請別誤會,我非常欣賞手柄,如果沒有手柄,VR中甚至還不會有任何引入手部交互的體驗。不過我們不能就此止步,雖然困難重重,但是我們應該做正確的事,而不是輕松的事。我們必須不斷改進我們的技術,直到它變得”傻瓜式的簡單”,因為只有到那時,普通人,而不僅僅限于游戲玩家或是VR愛好者,才會開始使用VR。這就是我們開發這個產品的動力。
背景知識普及:
在我深入討論產品之前,我應該列出一些背景資料,并指出一些人機交互領域常見的誤解,以便大家更好的理解。
VR人機交互的發展
上圖展示了VR中一些具有代表性的人機交互(HCI)工具,我不是按發布日期,而是基于功能來排序的。為了簡單明了起見,我對每個功能都使用了“勾”和“叉”的簡單標注,但這是不足以描述其中細微的差別的,為了完全理解它們,我會做進一步的解釋。
讓我們從游戲玩家熟悉的普通手柄開始。它有控制按鍵、搖桿和提供反饋的振動電機。然而,它并沒有將手的存在帶入VR,更不用說位置追蹤了。PS4手柄解決了追蹤問題,但仍然受到很多限制。
隨后出現的一個里程碑是Vive操控手柄,用戶首次可以將雙手位置數據分別輸入回VR,并通過扣動扳機鍵來拾取物體。手柄的兩側各有一個抓握按鈕,目的是讓人們輕松地“抓握虛擬物體”,但實際上用戶使用時并沒有感到特別輕松方便,許多人在松開控制按鈕時就會下意識的讓手柄從手中掉落,這讓他們感到困惑和不習慣。
OculusTouch手指追蹤展示
(這個演示主要集中于展示手指追蹤,基于按鈕的交互沒有在GIF中展示出來)
Oculus Touch提供了Vive手柄所提供的大部分功能之外,還提供了更好的人體工學改進,以及簡單的部分手指追蹤功能:拇指和食指開關式追蹤(只有張開和握緊)。它無法模擬(連續的)手指彎曲的精確追蹤,而且只作用于兩根手指。另外的三指彎曲檢測是通過一個抓握按鈕來實現的。它讓用戶更進一步地感受到了虛擬世界中手部的存在,但它仍然受到許多方面的限制。
Knuckles手指追蹤展示
Valve公司的Knuckles(現在叫做Index控制器)在Touch所提供功能的基礎上,進一步改進了手部追蹤功能。它在手柄上安裝了一組額外的傳感器,以實現全手五指跟蹤,并開發了一種非常創新的人體工程學穿戴方式,讓用戶可以完全張開手而不會掉落手柄,它是目前最完善的操控手柄。盡管如此,它的手指跟蹤仍然很受限制(只有不到30度的連續彎曲檢測,對于超過30度的手指彎曲幅度只能檢測為張開或握緊),并且只有有限的五個自由度:每根手指一個自由度,這意味著你不能將大拇指的旋轉自由度和四根手指的展開自由度輸入到VR中。
而Leap motion和其它一些基于視覺的手部追蹤解決方案則屬于不同的技術路徑。它們提供真實手部尺寸大小的全手追蹤與連續的手指彎曲追蹤,但可以理解的是,它不提供任何反饋方案,甚至連基于振動的觸覺反饋也沒有。盡管它擁有較高的精度和自由度(尤其是手指的展開的自由度和拇指的靈活度),但跟蹤的可靠性仍成問題。由于它基于視覺的解決方案,如果手到相機的光路被遮擋,它會立即丟失跟蹤數據。
數據手套是另一種精確手部追蹤的技術路徑。大多數數據手套使用基于彎曲傳感器或基于慣性測量單元(IMU)的解決方案,并根據使用的傳感器數量追蹤5 -10自由度的手部運動,使其能夠捕捉連續的手指彎曲。彎曲傳感器根據其物理變形來改變電阻,這意味著傳感器的使用壽命有限。而基于IMU的解決方案則使用磁場傳感器、加速度計和陀螺儀進行多傳感器數據融合,以重建每根手指的三自由度方向,并使用逆向運動學來反算重新生成手部模型。優點是傳感器本身不發生物理變形,因此它不會有損耗,但由于它是基于慣性的性質,數據的可靠性不高,長時間使用容易導致“數據漂移”,因此需要頻繁地重新校準。它的可靠性受金屬、磁體和周圍磁場的影響,這就是為什么很難把多個振動電機放在IMU手套附近。因為每當電機啟動時,磁場就會發生變化,數據的穩定性就會受到影響。而這反映在用戶體驗上就是:手部模型會突然看起來很扭曲奇怪。這種特性限制了數據手套的反饋系統,這就是為什么我們看到許多IMU數據手套只有一個電機安裝在手腕上:顯然,這樣的電機數量和位置并不是最佳的解決方案。
Dexmo手指追蹤展示
最后是我們的解決方案,這個機械外骨骼隨著用戶的手指一起運動,將其運動傳至內置的角度傳感器,并且在每個指尖產生力反饋。它可以捕獲11自由度的手部運動,從而能夠重建非常真實的手部模型。力反饋功能在物理上阻止用戶的手穿透虛擬物體,從而讓用戶感受其形狀、大小和剛度。雖然它比其他解決方案體積稍大,但卻是一種非常可靠的捕捉連續的手手指運動的方式,也給了我們足夠的空間來放置力反饋裝置。在不犧牲手部靈活性的前提下,我們在商業化數據手套歷史上第一次成功地將力反饋添加到了便攜式手套中。
如果我們回顧手柄的發展史,它的發展趨勢是非常明顯的。在VR中手部的交互已經變得越來越重要,人們嘗試了不同的方案來解決這個問題,每個產品都經過了多方面的權衡。手柄路徑試圖將手指追蹤添加到其硬件中,但由于硬件尺寸和所選擇的追蹤方式,使得追蹤精度和力反饋能力受到限制。這是他們不愿意放棄手柄形式的代價,因為手柄的制造成本相當低,并且目前它已經有很大的玩家群體基礎。但如果我們想要使用者突破與現有的玩家群體,就需要做出進一步的改變。基于視覺的追蹤不需要用戶穿戴任何東西,這降低了“穿戴成本”,但不穩定的追蹤會立刻打破沉浸感,并且反饋的缺失會讓用戶很難知道自己在虛擬世界中正在做什么。而數據手套則介于以上兩者之間,雖然它有時會出現小故障,但它提供了相對可靠的手部追蹤并能夠提供某種形式的反饋。不過相比于輕松地拿起手柄,費勁穿戴數據手套會阻礙它的易用性,而且它使用的單點式反饋也沒有給用戶的手部足夠的反饋信息。一個真正能夠平衡以上各方面問題且易于使用的解決方案還尚待發掘。
我并不是說Dexmo是人機交互(HCI)的最佳方案,因為它還有很多需要改進的地方。可能會需要溫度、紋理和許多其它反饋以不斷提高沉浸感,但力反饋確實給VR帶來了難以置信的沉浸感,這無疑是一個巨大的進步。
我想補充的另一點是反饋的添加必須遵循一定的順序。力反饋涉及到電機的放置和傳動,因此占用了很大的空間,這會極大地改變它的整體形態。首先解決了這個問題,然后添加其他形式的反饋,要比按照其它順序來做容易得多。這就是為什么我認為我們的外骨骼設計標志著VR人機交互革命的良好起點。
一些常見的誤解
整體追蹤和局部追蹤:
整體追蹤(定位追蹤)和局部追蹤(手指/手部追蹤)是不同的概念。在文章中當我談到手套時,我主要關注的是它們的局部追蹤能力。手套的定位追蹤可以通過附加現有的追蹤技術(如Vive追蹤器、OptiTrack標記等)來實現,所以我在上面的討論中省略了這一部分。
手指追蹤和手部追蹤:
盡管許多硬件都多少加入了手部感知交互功能,但他們實現的程度并不相同。這里比較的主要標準是“手指彎曲的連續性”、“自由度”、“可靠性”和“整體體驗”幾個方面,而不僅僅是被多數人錯誤使用的“精度”。如果人們評價某個“精確但不可靠”的解決方案要比某個”可靠且具有更高的自由度但不那么精確”的解決方案更好,這是不公平的,我們的評判標準不應該只有精度。
在VR中,手指能夠連續動作并以任意角度彎曲,與手指只能開關式地做到展開或彎曲兩種狀態是不同的。這種差異是由不同的追蹤方法造成的,Touch和Knuckles都使用了接近傳感器對手指進行兩種狀態的檢測,因此它們只能檢測手指的“按壓”和“松開”兩個狀態,并通過動畫對圖形進行補償,只能捕捉3或5自由度的手指動作。而數據手套和基于視覺的解決方案可以在更高的數值范圍精確檢測手指彎曲,并檢測更高自由度的手部運動。手柄產生開關式的數據,所以它們的可靠性較高;而基于視覺的解決方案雖然有較高的精度,但由于存在因視覺阻擋造成的數據跟蹤丟失問題,其整體體驗存在爭議。
拇指追蹤本身也很重要。對于大多數手部追蹤解決方案,其目的只是單純的重建看起來像真手的虛擬手,而不是重建基于真手運動原理的虛擬手。例如,當你用手柄抓取虛擬物體時,虛擬的手會自動合攏呈抓握狀態,然后手柄會振動。足夠逼真的手部模型和動畫效果可以達到障眼法的效果,在不需要將特定的反饋應用在各個手指的時候,這是可行的。但這不是真實的力反饋,甚至算不上觸覺反饋。為了讓力或振動發生在適合的位置并輸出適合的大小,手的虛擬重建需要盡可能接近真實。我們的拇指有3個自由度,如果我們一開始就忽略拇指數據,那我們就不可能準確提供反饋。這就是為什么我們的Dexmo具備捕捉所有拇指動作的能力。
觸覺和力反饋:
觸覺這個詞現在被過于寬泛地使用,以至于產生了一定誤導性。觸覺的原意是“涉及觸覺的任何交互方式”,它涵蓋了很多方面:振動、紋理、溫度、力傳導。由于許多游戲手柄都內置振動電機,然后以“觸覺反饋”的名義進行宣傳,許多人便將“觸覺”視為狹義的“振動”,這是種常見的誤解。
觸覺其實有多種形式。為了幫助大家理解,我將以產品為例,主要解釋不同類型的振動和力反饋的區別:
單點振動:Xbox手柄(手柄兩側各兩點),操控手柄,部分數據手套。
多點振動:VR觸覺反饋背心,其多個電機均勻分布在整個表面。
單點式力反饋:Sensable Phantom力反饋設備,Novint Falcon 力反饋控制器,它們在一個點提供6自由度的力反饋。
多點式力反饋:Dexmo,為多個點提供局部力反饋。
當一些數據手套被宣傳為“觸覺手套”時,人們往往會產生錯誤的印象:當他們戴著手套在VR中觸摸物體時,他們以為可以感覺到物體在指尖或手掌上的觸感。但實際上,最后他們可能體驗到的只是一個非常令人失望的手腕上的單點震動,盡管嚴格意義上這確實是”觸覺手套“,但跟人們的預期其實相差甚遠。當公司在說“觸覺”時沒有特地注明“力反饋”,它們通常只是振動反饋而已。
產品的發展:
在我開始做這項工作之前,我花了大量的時間思考如何讓任何人都可以輕松使用Dexmo,結論是各個方面都需要降低成本。我所指的不單單是硬件成本,還包括使用它所需的學習成本、穿戴成本、硬件制造成本、軟件開發成本等。這些可以分解為產品的許多不同方面,例如,為了讓人們自然順暢地使用它,產品本身不能太大太重,如果它太重,或者它的大小會延伸覆蓋到手腕,或者還有連接線把你拖拽住,那它就不是個對用戶友好的產品,因為每次你意識到有連接線在那里拖著的時候就會打破VR的沉浸感。這些就是我們需要解決的問題,我們知道了創造這個產品有大小和重量的限制,以及各種各樣的其他限制,那么我們就必須找出最佳方案。我們牢記著這個方向和原則,開始了我們的探索與研究。
在2014年我們首次公開亮相,我最初的想法是打造一個外骨骼,不僅可以捕捉手部運動,還可以在它的指尖提供基于微型制動盤結構的開關式力反饋功能。這個嘗試成功了,它確實可行,但還不夠好。最大的缺陷是高延遲和機械制動器導致的不連續力反饋。所以我們又重頭開始研究。
2016年,我們發布了新的Dexmo。雖然有著相似的外骨骼外觀,但它實際上基于完全不同的機器人技術架構,它能夠持續輸出扭矩,并且延遲控制在50毫秒。這是一個巨大的改變,它證明了直驅的力反饋手套的確可以實現。盡管許多人仍然認為它“笨重”,但它表明外骨骼結構是未來力反饋手套的一個可行方式。
我們不僅僅是在做一個可用的硬件。我們需要理解和平衡“能夠實現”和“應該實現”之間的區別。例如,我們可以在每只手放置20個電機來制作力反饋最逼真的手套,但它的重量將達到1kg,價格貴得離譜,而且完全無法穿戴,這違背了我們的初衷。
這是我們過去50多代Dexmo設計版本迭代中的一些選集
自2016年,我們的團隊大部分時間都在號稱“硬件科技的灣區”的深圳,在這里,有各種各樣比世界上任何地方都更容易獲取的零配件。我們募集了數千萬的啟動資金,接著投入工作,那時起我們進入了“隱身模式”,停止了一切公關活動。因為我知道要讓它真正的達到體驗良好,我們仍然有大量的工程問題亟待解決。相比夸大其詞,告訴大眾這個產品有多棒,但是大眾卻看不到或試用不了,我更喜歡先著手完成工作,先展示產品再講故事。我一直認為過度銷售是一種危險的策略,不懂適度,反而會適得其反。
我們讓行業內的專業人士測試了第一批工程樣機,他們給出了真實的想法和建議。從我們收集到的反饋來看,他們普遍喜歡我們的產品和使用體驗,并對我們的努力表示了極大的贊賞。從他們那里聽到他們認為這項技術更先進,這讓我們更加堅定了我們走的道路是正確的。
雖然我們獲得了不錯的反饋,但是還有很多需要改進的地方。從那時起,我們開始優化每一個小細節來改進Dexmo,包括人體工學、重量、尺寸、結構完整性、電機控制、無線通訊、制造工藝、交互處理引擎、提供給開發人員的SDK、項目demo……這里涉及了超過16個不同的技術棧,需要軟件、控制、電子和機械工程師之間的密切合作。這些工作非常復雜,我們很享受。
在Dexmo的開發過程中,軟件是一個關鍵且極具挑戰性的部分。為了讓人們更容易地使用Dexmo,它不能僅僅以一個硬件設備的形式存在,它還需要成為一個完整的系統。這在我們剛開始的時候確實非常矛盾,為一個尚不存在的硬件構建軟件幾乎不可能辦到,但是在我們有了硬件開始開發軟件之后,又很快就意識到有些改進最好直接從硬件上進行調整,而這又會反過來影響軟件架構。每次我們更新系統,都要至少花2個月的時間。
一個僅僅可用的SDK和一個優秀好用的SDK是非常不同的。2017年我們出貨了一些早期測試設備,提供了已被許多人成功應用的SDK。然而,我們的客戶仍然遇到了很多問題,最終我們電子郵件來來回回數百封來解決這些問題。我們低估了新硬件系統對軟件開發者的困難程度。
Dexmo SDK的步驟說明書
在VR中建立一個優秀的手部-物體交互界面并不容易,因為這個硬件是前所未有的。因此,我們預定義了許多交互模塊,并將它們封裝成到示例程序,以幫助開發人員入門。為了使SDK易于使用,它還必須有優秀的文檔,這也需要我們額外的工作。在接下來的一年里,我們為SDK制作了循序漸進的分步驟開發指南,即使沒有軟件開發經驗的人也能夠按照指南使用SDK。(有件小趣事:我們的一個SDK測試工程師是機械工程專業,剛加入我們團隊時,他的編程能力為零,而現在他也可以很輕松地使用SDK。)
最具挑戰性的部分是了解生產流程。不出所料,大規模地生產如此復雜和新穎的產品是極其困難的。生產力反饋手套并不像生產頭戴式顯示器,因為后者跟智能手機的硬件組成很相近,可以參考其生產線設計。而沒有現成生產線可供我們參考,甚至沒有人知道什么是“力反饋手套”。因此,我們的工作不得不繼續下沉到生產環節。
我們的力反饋裝置單元的發展合集
以我們的力反饋單元為例,在過去的幾年里,它經歷了幾十次迭代。我們開始使用的舵機(展示架的最左邊)最初是為遙控車和航模設計的,因此它的空間利用率很低,扭矩傳導的結構強度較低。這個舵機單元非常寬,所以很難同時把五個舵機安裝在手背上。雖然我們可以做出妥協,把舵機安置在手腕上,但我知道這不是真正解決問題的辦法。我們需要不惜一切代價使這個系統盡可能緊湊簡潔。所以我們決定從零設計我們自己的舵機系統,從了解舵機的必要組成元件和每個零件的制造過程開始。
舵機的外殼是由鋁CNC加工而成,這意味著我們可以自定義改變它的幾何形狀。通過在將扭矩輸出軸置中,我們使它變得更薄,同時使結構更穩定。這些齒輪是由滾齒機加工而成,而滾齒機可以加工不同的材料,這表明傳動設計也是可以調整的。我們試驗了不同材料,尋找最高性能重量比的材料,盡可能的在最輕的質量下獲得最佳性能。通過換用具有更高計算能力的芯片集,并放入更多傳感器,我們實現了更精密的電機控制。通過改進這些細節,我們開始覺得一切皆有可能。我們一步又一步地深入,最終完全重構了力反饋單元。它的最終形態是專門為力反饋手套設計的,緊湊簡潔,顯露出一絲優雅。
這個例子只是冰山一角,系統的每個部分都經歷了像這樣極端坎坷的分析和改進。我個人在工廠住了8個月,了解生產加工的每一個細節。我們必須不斷平衡工程需求和供應商能夠提供的成品,使我們的生產過程平穩可靠。畢竟,如果一個新技術雖然被開發出來,但不能被生產和分享,它的意義也很有限不是嗎?
原型與最終產品背后所付出的工作有著巨大差異
對于不熟悉制造過程的人來說,產品原型和最終產成品之間看起來似乎沒太大差別。但事實上,盡管其外表相似度有90%,但它們隱藏在外觀下所需付出的努力卻可能相差數百倍。
以下是硬件制造的一些簡單步驟:
產生想法> 想法的驗證 > 可運作原型> 工業設計>將工業設計與工作原型有機結合 > 改進 > 工程驗證 > 進一步改進>設計驗證 > 最終可生產設計> 前期生產準備> 零件采購> 供應商溝通> 零件質檢 > 裝配流程設計> 零件裝配 > 質檢測試> 產品總裝 > 整體質檢測試> 最終待發貨產品 > 包裝 > 運輸
不可避免地,由于各種各樣的隨機問題,其中一些環節可能會以令人難以置信方式重新反復數次,使得這一切更加更難以推進。例如,在上次的批量生產流程里,當我們以為自己已經掌握了每一道細節時,一個供應商告訴我們,我們的力反饋單元上有些細小的零件被不小心遺留在陽極氧化池里,然后溶解了。這件事導致整個組裝推遲了一個月。當我聽到這個消息時我放聲大笑了很久。苦笑。
你們可能會問:為什么不找像富士康這樣更可靠的供應商呢?好問題。創新通常意味著最初時產品產量較小,而工廠為了追求最大利潤通常只愿意接大批量的訂單。這意味著大工廠不想和我們這樣的小公司合作,因為對它們來說訂單小意味著經濟效率低。但我們又必須先小批量銷售,然后才能進行大批量生產。很好笑吧?
我們花了數年的時間才把它從一個原型變成“可以準備發貨”的產品。我想強調的是,這不是一項簡單而微不足道的工作。它不是僅僅“設計就緒”或“制造就緒”,而是已經“發貨就緒”,這意味著只要有需求,我們就可以成千上萬地生產這個產品。
我常常看到人們因為一個的實驗室里的原型硬件而極度興奮,然后他們就開始期望團隊幾個月后就能發貨;或者將我們與一些聲稱產品與我們的同樣好用,但其實才成立了幾個月的公司相提并論;每當這時我都會無奈長嘆。這個想法很可愛,但是將原型與最終成品進行比較是不公平的。任何有Kickstarter硬件項目經驗的人都知道我在說什么,在Kickstarter上承諾的所謂“四個月交貨”實際上意味著需要兩年甚至更長時間,而通常到了最后,大概率都會在這些團隊的消失和無數支持者憤怒的聲討中告終。
在進行了所有的這些努力后,這是我們目前取得的成果:
這在商業化力反饋手套歷史上是第一次:我們將5個力反饋裝置,11個動作捕捉傳感器,可充電電池,以及整個控制系統集成在一只不到300克重量的手套中,兼具高便攜性與無線連接,讓用戶在虛擬世界擺脫束縛,自如地運動雙手,而不打破虛擬世界的沉浸感。
Dexmo能夠捕捉全手11個自由度的動作,包括大拇指的 3個自由度(旋轉、展開和彎曲)和其余四指各2個自由度(展開和彎曲)。微型力反饋單元可以對用戶的指尖施加可達10N的力。其優秀的拇指跟蹤,有助于精確重建手部模型。用戶可以感受虛擬物體的大小、形狀和剛度,從而大大提升了沉浸感,并獲得更直觀的交互。
我們遵循面向制造設計(DFM)原則,如今我們能夠以嚴格的質量控制標準進行大規模生產。我們的SDK已經被許多早期客戶測試過,并且經過一步步改進,現已達到真正“易于使用”的階段,即使是對VR背景知識知之甚少的人也能夠按照分步驟指南使用它。人體工程學是我們關注的另一個非常重要的部分,我們研發了一套特殊的固定機制,使用戶既方便舒適又衛生地穿戴Dexmo。
基于這些功能,用戶第一次可以在VR中看到自己的手,同時還可以真實地感受到自己在抓握并不存在的現實。在VR引入力反饋之前,其沉浸感很容易被打破:每當你試圖抓起某個虛擬物體,但看到手指卻穿透了它,你就會意識到它不是真實的;當你為了假裝拿著虛擬物體而不得不擺出某種姿勢時,你就能意識到那不是真實的;無論動畫或音效有多逼真,你都能察覺。
這絕對不是說我們的系統是完美的,或者說我們能重建人類手部的所有感知,我們現在還不能模擬重量。物理學告訴我們,要想模擬重力,我們需要一整套外接的機械臂系統來產生反作用力;我們也不能模擬溫度,因為要想模擬溫度,需要將半導體緊密地排布在整個系統中;我們也還不能提供更精確的觸覺,其他電機驅動方式還有待進一步探索和研發等等……
SDK交互模塊
綜上所述,力反饋無疑是虛擬世界中的一個重要的感官維度,一個被渴望已久的虛擬現實人機交互方式,它將VR人機交互的邊界又歷史性的向前推進了一步。我們的許多軟件交互都是基于這項新技術開發的,比如手指的敲擊、按壓、彈撥、旋轉、滑動,按下按鍵、拉動拉桿、旋轉旋鈕等等,為了讓開發者更容易上手,所有這些動作都在我們的SDK中創建和測試過。當與正確的圖形和動畫效果相結合時,許多原本不可能實現的應用程序都將成為可能。
Dexmo的部分應用領域
經常有投資者問我:你們的客戶有哪些?這其實是一個很難回答的問題。因為很快每個人都可能成為我們的客戶。我一直認為未來VR最基本的硬件配置就是一個頭顯加上一雙力反饋手套。目前我們正在與一些研究機構、前沿工業專家和大學合作,這些合作涵蓋了各種各樣的項目,例如:飛行模擬、航空航天仿真、航天員訓練、筆記本電腦裝配線訓練、安全生產培訓、汽車裝配培訓、教育、醫療培訓、康復訓練、大空間游戲、展覽、遠程操作等,因此各行各業都有我們的潛在客戶。力反饋手套確實為虛擬場景增加了另一個層次的沉浸感,使其更加真實。
舉幾個具體的例子:
我們的一個客戶在做筆記本電腦裝配線上的員工培訓的實驗,在中國,很多生產線存在著工人流失率高的問題,這意味著很多熟練工人必須花費大量的時間來教新手操作流程,這就降低了他們的產量和工廠的整體經濟效益。第一個實驗應用的是Oculus,新入職工人使用Oculus Touch在VR中學習裝配電腦,雖然他們覺得這很有趣,裝配流程中需要靈活使用手指的操作步驟并沒有反映在虛擬訓練中,這使得該培訓軟件的訓練效果遠不如預期。但當他們開始使用Dexmo進行訓練時,工人們可以更快更適應地接受培訓課程,因為Dexmo的手部互動更直接。
還有一個例子是飛行仿真訓練。在我們仿真訓練領域的客戶中,駕駛艙模擬是一個常見場景,它通常需要讓用戶在VR中撥動開關和按下按鈕,而這是手柄無法做到的。在這種情況下,LeapMotion相對不穩定,而我們的力反饋技術則可以滿足其需求。可以想象一下,在未來飛行員都必須通過VR飛行模擬考試,而不僅僅是閱讀手冊來猜測要按哪個按鈕。
在核電站,操作人員可以接受VR培訓以應對潛在的核泄漏等緊急情況,他們可以在虛擬環境中學習拉哪個操縱桿,先轉動哪個把手或旋鈕,接受應對各種可能發生的災難現場的流程培訓;在太空項目中,為了讓宇航員預先熟悉太空任務,我們可以用VR技術建造空間站,而不需花大價錢在地面上復制空間站,他們將能夠在VR中模擬執行任務。
我一直認為Dexmo最大的潛力是在游戲和VR社交領域。在RecRoom中,你可以拿起旗子、投籃、扣下十字弩的扳機等等。想象這一切動作都變得無縫貼近現實,你不需要學習或者記住哪個按鈕是做什么動作的,或者按下哪個組合鍵可以調出菜單欄……你可以做任何你在現實生活中做的動作。你想摘個蘋果,就直接用手去摘吧;你想給槍裝彈,只要把彈匣插進去,拉一下槍栓即可;你想打開一個盒子,打開電視,喝一瓶水……一切的互動都是直接的。當然,Dexmo帶來的幫助遠不止我剛才所列出的。
我想你們也有很多問題想問,所以我先簡要回答一些常見的問題。
Dexmo支持Oculus/Vive/PSVR/WMR/HoloLens嗎?
是的。Dexmo兼容于大多數房間尺度的VR系統。Dexmo目前還沒有一個內置的空間追蹤解決方案,因為在這個階段我們想讓它更開放地兼容所有空間追蹤解決方案。在技術上,它支持任何帶有6自由度的運動手柄的VR系統,所需要的只是一對坐標和方向,以及初始位置校準。HoloLens略有不同,因為它沒有自帶6自由度的手柄,而且它是一個一體化系統,甚至沒有USBhub,但如果我們能將一些其他跟蹤數據(如OptiTrack)傳輸到系統中,它仍然可行。
Dexmo的價格?
簡而言之:很貴。雖然我希望每個人都能盡快得到Dexmo,但目前的版本實際上是針對B端客戶的。先別沮喪,聽我說完,我向你保證我們現在之所以這樣做是有道理的。
你們公司的未來計劃是什么?
2014年,我們取消了Kickstarter的眾籌,因為我們意識到Dexmo還沒有做好面向消費者的準備。消費者想要的是價格低廉、支持良好、帶有大量游戲、開箱即用的產品。功能只是普通消費者想要的眾多需求之一。撇開價格因素不談,我們還沒有完備的各項支持。硬件方面,我們需要從SDK層面集成進Facebook,微軟,索尼和HTC等頭顯設備制造者的系統中;在軟件方面,我們需要來自開發者社區的支持,在普通消費者購買Dexmo之前先開發好游戲。這些都需要我們現在市場中證明力反饋手套是正確的發展方向。
我們計劃通過同B端伙伴合作來實現這一目標。通過為早期采用者提供最先進的技術,他們可以開發更令人驚嘆的VR項目,從而使他們的經濟受益。這些早期采用者愿意為研發做投入,他們可以使用Dexmo進行開發并提供更多有價值的反饋,我們可以一起創造更多令人驚嘆的VR體驗,來向世人展示一個優秀而完整的VR系統能夠做到什么程度。我們希望推動力反饋手套和頭顯最終成為VR系統的默認硬件配置,到那時它將成為每個人都需要的東西。
作為普通消費者,我們什么時候能買到它?
為了維持公司的運營并不斷推進VR人機交互的發展邊界,我們需要足夠的資金。我們籌集的很多資金都投入到了研發。我們首先需要成為一個盈利的公司,這樣才能使力反饋手套的消費者版本更快面世。如果我們提前賣給普通消費者不能使他們滿意的產品,而且售價又不能覆蓋我們的研發成本,我們將很難實現這個目標。所以,請讓更多的人知道Dexmo,盡管你還不能買到它,但大家可以談論它,分享它的信息,這對于產品的未來很有幫助。當我們每年可以出貨數萬套Dexmo的時候,憑借規模經濟效應和之前做好的市場驗證,我們離消費者就不遠了。雖然消費者版本的推出時間還不明確,但我們會盡我們所能,讓它盡早到達消費者手中。
好的,我們已經接近尾聲了。感謝閱讀這篇長文。請容許我這樣說,我認為Dexmo標志著在沉浸式VR領域踏出的關鍵一步,它完成了一件既非常困難又及其重要的事情。當然,這個系統離完美還有一定距離。籌集到資金的規模,商業驗證推進的時間線,研發上的投入……但我們正在一步步邁向目標。我們在辛苦工作,我們知道自己正在做什么,它將會變得越來越好。這就是我們想要傳達的給大家的信息。
-
人機交互
+關注
關注
12文章
1236瀏覽量
56212 -
vr
+關注
關注
34文章
9666瀏覽量
152094 -
交互技術
+關注
關注
0文章
34瀏覽量
12857
原文標題:Dexta Robotics CEO谷逍馳:從Dexmo創造史看力反饋交互技術
文章出處:【微信號:vrtuoluo,微信公眾號:VR陀螺】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
反饋電路有哪些類型?如何判斷反饋電路的正負極?
什么是電路反饋 電路反饋類型介紹
DFT的常見誤區與解決方案
常見散熱材料的優缺點以及應用場景
編程語言的誤區與常見問題
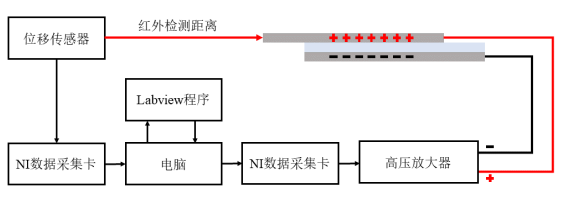
Aigtek高壓放大器在靜電吸附的觸覺力反饋研究中的應用





 工商網監
工商網監
評論