PLC控制伺服電機準確定位的方法(2)
2.1 系統(tǒng)工作原理
步進電機因其具有結(jié)構(gòu)簡單、控制方便、轉(zhuǎn)動慣量低、定位精度高、無累積誤差和成本低廉等優(yōu)點而成為工業(yè)控制的主要執(zhí)行元件,尤其是在精確定位場合中得到廣泛應用。在工業(yè)生產(chǎn)中,步進電機和生產(chǎn)機械的連接有很多種,常見的一種是步進電機和絲杠連接,將步進電機的旋轉(zhuǎn)運動轉(zhuǎn)變成工作臺面的直線運動。當需要對工作臺面移動距離進行定位控制時,只需要控制步進電機的轉(zhuǎn)速和角位移大小即可。在非超載的情況下,步進電機的轉(zhuǎn)速和角位移只取決于脈沖信號的頻率和脈沖數(shù)。它輸出的角位移與輸入的脈沖數(shù)成正比,轉(zhuǎn)速與脈沖頻率成正比。改變繞組通電的相序,則可以實現(xiàn)步進電機反轉(zhuǎn)。
目前世界上主要的PLC廠家生產(chǎn)的PLC均有專門的高速脈沖輸出指令,可以很方便地和步進電機構(gòu)成運動定位控制系統(tǒng)。由PLC高速脈沖指令控制步進電機實現(xiàn)準確定位的實質(zhì)是PLC通過高速脈沖輸出指令PTO/PWM輸出高速脈沖信號,經(jīng)步進電機脈沖細分驅(qū)動器控制步進電機的運行,從而推動工作臺移動到達指定的位置,實現(xiàn)準確定位。工作臺移動的距離與PLC脈沖數(shù)之間的關系為:
式中:N為PLC發(fā)出的控制脈沖的個數(shù);n為步進電機驅(qū)動器的脈沖細分數(shù)(如果步進電機驅(qū)動器有脈沖細分驅(qū)動);θ為步進電機的布距角,即步進電機每收到一個脈沖變化,軸所轉(zhuǎn)過的角度;d為絲杠的螺紋距,它決定了絲杠每轉(zhuǎn)過一圈,工作臺面前進的距離;δ為脈沖當量(定位精度);i為傳動速比;L為工作臺移動的距離。
顯然,利用PLC控制步進電機實現(xiàn)準確定位的關鍵是對PLC產(chǎn)生的脈沖數(shù)的設定。而脈沖數(shù)與脈沖當量、傳動速比、步進電機驅(qū)動器的細分數(shù)以及脈沖頻率等都有關。
2.2 設計與實施
以貨物倉儲系統(tǒng)中的對直線導軌的定位控制設計為例加以說明。在倉儲系統(tǒng)中,要求由步進電機拖動直線導軌將料塊送到指定的倉庫門口。假設從起點到終點的運送距離為100 mm,即要求由步進電機帶動導軌作直線運動,定位距離為100 mm。為實現(xiàn)準確定位,系統(tǒng)采用西門子S7-200系列CPU226型PLC、四通57BYG250C混合式步進電機和森創(chuàng)SH-20403步進電機驅(qū)動器等設備。其中CPU226型PLC的CPU有兩個脈沖發(fā)生器,分別是Q0.0端子和Q0.1端子。這兩個端子均可輸出PTO/PWM高速脈沖信,脈沖頻率可達20 kHz。根據(jù)控制要求,系統(tǒng)擬采用高速脈沖串輸出PTO功能,PTO功能可輸出一定脈沖個數(shù)和占空比為50%的方波信號。輸出脈沖的周期以μs或ms為增量單位。PTO功能允許多個脈沖串排隊輸出,從而形成流水線。流水線分為兩種:單段流水線和多段流水線。
為了消除電機的低頻振蕩,提高分辨率,采用了步進電機細分驅(qū)動器,驅(qū)動步距角為0.9°/1.8°,脈沖細分數(shù)設定為4。為保證速度和定位精度要求,步進電機運行一般要經(jīng)歷三個過程,即啟動加速、恒速運行和接近定位點時的減速運行。為了維護步進電機以及驅(qū)動設備,要求驅(qū)動脈沖頻率也線性增大,所以,本定位控制系統(tǒng)采用多管線操作,控制電機的運行過程。設直線導軌起始位置在A點,現(xiàn)欲從A點移至D點,其中AD=100 mm。定位精度只與步進電機脈沖當量有關,取脈沖當量為0.11 mm/脈沖,則需要900個脈沖完成定位。步進電機運行過程中,要從A點加速到B點后恒速運行,又從C點開始減速到D點完成定位過程用200個脈沖完成升頻加速,500個脈沖恒速運行,200個脈沖完成降頻減速。如圖2所示。
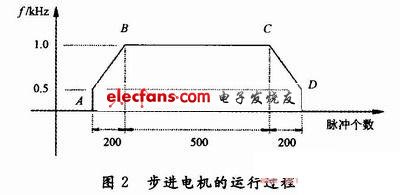
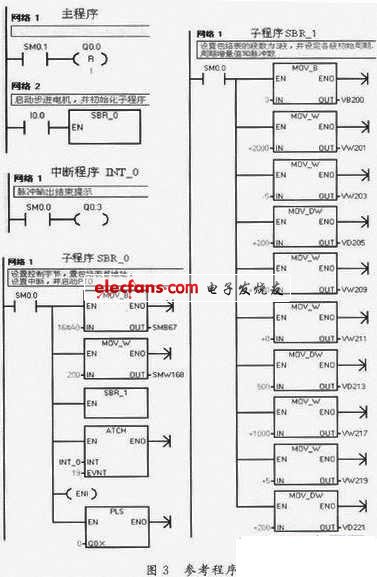
因此確定PTO為3段脈沖管線(AB,BC,CD)。設最大脈沖頻率為1 kHz,將16#A0寫入控制字節(jié)SMB67,允許多段PTO脈沖輸出,時基為μs級,建立3段脈沖的包絡表并對各段參數(shù)分別設置,給定段的周期增量按下式計算:
給定段的周期增量=(該段結(jié)束時的周期值-該段初始的周期值)/該段脈沖數(shù)
包絡表結(jié)構(gòu)如表1所示。

參考程序如圖3所示。
這種控制方式屬于對步進電機的一種開環(huán)控制,其優(yōu)點是結(jié)構(gòu)簡單、成本低、定位準確、易于實現(xiàn)等。
- 第 1 頁:PLC控制伺服電機準確定位的方法(1)
- 第 2 頁:步進電機實現(xiàn)準確定位#
- 第 3 頁: 控制系統(tǒng)設計與實施#
本文導航
非常好我支持^.^
(0) 0%
不好我反對
(0) 0%
相關閱讀:
- [單片機] 伺服電機中32位MCU的應用 2011-07-01
- [控制技術] AOD投料PLC控制 2011-06-21
- [PLC實驗] PLC控制系統(tǒng)的可靠性研究分析 2011-06-21
- [PLC實驗] 基于現(xiàn)場總線監(jiān)測的PLC控制系統(tǒng) 2011-06-16
- [PLC實驗] PLC控制的氣動元件在HXFA368型條并卷聯(lián)合機上的應 2011-06-15
- [單片機] 瑞薩電子32位MCU在伺服電機中的應用 2010-11-22
- [控制技術] 地源熱泵PLC控制技術在國家體育場(“鳥巢”)中的 2010-11-01
- [電力技術] 淺析數(shù)控系統(tǒng)伺服電機控制 2010-10-30
( 發(fā)表人:葉子 )