















恒流軟啟動最大的障礙,就是避免進入轉矩和電流振蕩。通常采用閉環的pid控制實現異步電動機的恒流軟起動。交流電動機是高階、非線性、強耦合的被控對象,所以普通的pid控制難以達到理想的控制效果,從而容易造成在輕載起動過程中發生轉矩和電流的振蕩。模糊控制不依賴于精確的數學模型,而且集結了有經驗的專家的多年的控制經驗,因而可以實現較理想的控制。其原理圖如圖4所示。

圖4 控制原理圖
選取起動電流偏差e和偏差變化率ec作為模糊控制器的輸入量,e和ec均為精確的輸入值,要采用模糊控制技術就必須把它們轉換成模糊集合的隸屬函數。
把e的變化范圍設定為[-6,6]區間連續變化量,使之離散化,構成含13個整數元素的離散集合:{-6,-5, -4,-3,-2,-1,0,1,2,3,4,5,6}。e是在[0,ist]之間,通過變換:e=12/ist[x-(0+ist)/2],將在[0,ist]之間變化的變量x轉換為在[-6,6]之間變化的變量e。同理,可將die/dt 的區間[0,20a/s]轉換為[-6,6]之間變化的量c;δu的區間[0,0.1]轉換為[-6,6]之間變化的量。然后取加權平均系數β=0.9, 根據:δu=βe+(1-β)ec即可得到e和ec一一對應的模糊規則表。
在實際運行中,通過上述轉換后通過查表得到δu的模糊值,然后根據反模糊規則δu=uk×0.1/12+0.5,從而得到實際的輸出電壓u的值,通過移相觸發確定觸發角α。最后當啟動完成后,bang-bang控制,關閉開關變壓器的開關。
4 試驗及結論
根據上述設計方案,進行了試驗,被控對象為1140v/85a的感應電動機,其額定轉速為970r/min。采用恒流軟起動控制方案時的電流電壓波形由圖可見,圖5為直接啟動時的電流曲線,空間啟動沖擊較大;圖6為1.5倍額定電流啟動電流電壓曲線,電壓上升平穩,電流基本無沖擊,效果比較理想。比較好的解決了轉矩振蕩引起的電流振蕩問題。
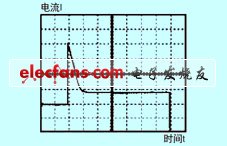
圖5 直接啟動的電流曲線

圖6 1.5倍額定電流啟動的電流電壓曲線
5 結束語
本文首先分析了在電機啟動過程中的功率因數角變化的問題,并把它作為一個參量考慮到變電壓軟啟動中經常出現的轉矩震蕩和電流振蕩問題。采用模糊控制算法,吸取專家經驗,閉環反饋電流,有效的解決了恒流軟啟動中的振蕩問題,得到了較理想的控制效果。








 工商網監
工商網監
用戶評論
共 0 條評論