















上位機具備強大而快速的運算能力,因而PID 算法、模糊控制算法、人工神經網絡控制算法、遺傳算法等各種控制策略都可以方便地實現。這里主要采用模糊控制算法。
3.2.1 調速算法
三相異步電動機模型是一個高階非線性強耦合多變量的模型[1],進行控制時需要考慮多方面的因素。 例如轉子的電壓、頻率、磁通,以及轉子轉速和位置等參量之間互相影響存在耦合,繞組存在電磁慣性, 轉子存在機電慣性,轉子的電阻值會隨溫度而變化,負載轉矩、轉動慣量等有可能出現各種隨機擾動等。 這些因素的影響給控制帶來了困難,僅采用經典的控制方法很難達到較高的精度要求。而模糊控制算法無 需被控對象的精確數學模型,且對被控對象的參數變化不敏感,魯棒性強。因此將變頻器和異步電動機看 作一個整體,采用模糊控制算法實現速度控制。
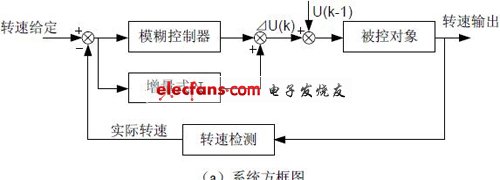
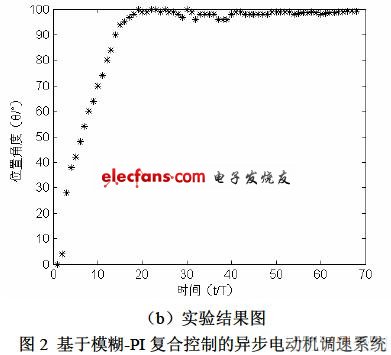
同時考慮到模糊控制器是一個有誤差控制器,達到期望速度后的穩態階段波動比較大。而采用PI控制, 當誤差較小時有較高的穩態精度[2,3]。故而把增量式PI控制策略引入模糊控制器,構成模糊-PI復合控制,以 改善模糊控制器的穩態性能。基于模糊-PI復合控制的異步電動機調速系統如圖2(a)所示,實驗結果如圖 2(b)所示(給定轉速100 r/min,采樣周期T=150ms,轉速誤差≤1.0 r/min)。
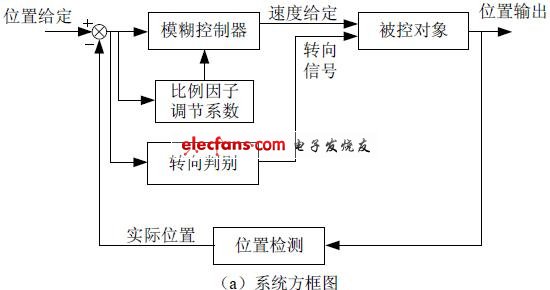
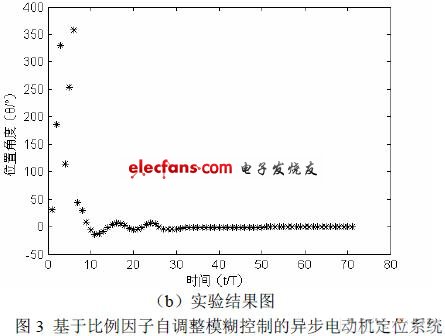
基于比例因子自調整的模糊控制系統如圖 3(a)所示,實驗結果如圖3(b)所示(電機額定轉速運 行時定位于0°,采樣周期T=150ms,位置誤差≤0.09°,即1 個計數脈沖的位置間隔)。
4 結語
本文基于PLC硬件平臺,充分利用PLC自身資源,設計了異步電動機的速度和位置綜合控制系 統。實驗表明該系統達到了一定的控制精度,具有一定的實用參考價值。








 工商網監
工商網監
用戶評論
共 0 條評論