 電子發(fā)燒友App
電子發(fā)燒友App


蘋(píng)果公司從iPhone X 的開(kāi)始引入了3D 深度傳感技術(shù),它便是蘋(píng)果 Face ID 功能的基礎(chǔ)。
iPhone X 的 3D 攝像頭采用的是紅外 3D 結(jié)構(gòu)光方案,包含「紅外光源+光學(xué)組件+紅外傳感器」等部分,其中最關(guān)鍵的部分就是紅外光源。早期 3D 傳感系統(tǒng)一般都使用 LED 作為紅外光源,但是隨著 VCSEL 芯片技術(shù)的成熟,在精確度、小型化、低功耗、可靠性等角度全方面占優(yōu),因而現(xiàn)在常見(jiàn)的 3D 攝像頭系統(tǒng)一般都采用 VCSEL 作為紅外光源。?
3D視覺(jué)測(cè)量原理
要談3D視覺(jué)應(yīng)用方案,就必須先弄清楚光學(xué)測(cè)量分類(lèi)以及其原理。光學(xué)測(cè)量分為主動(dòng)測(cè)距法和被動(dòng)測(cè)距法。
主動(dòng)測(cè)距方法的基本思想是利用特定的、人為控制光源和聲源對(duì)物體目標(biāo)進(jìn)行照射,根據(jù)物體表面的反射特性及光學(xué)、聲學(xué)特性來(lái)獲取目標(biāo)的三維信息。其特點(diǎn)是具有較高的測(cè)距精度、抗干擾能力和實(shí)時(shí)性,具有代表性的主動(dòng)測(cè)距方法有結(jié)構(gòu)光法、飛行時(shí)間法、和三角測(cè)距法。
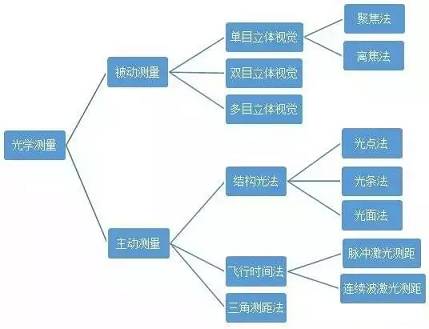
1. 主動(dòng)測(cè)距法
(1)結(jié)構(gòu)光法
根據(jù)投影光束形態(tài)的不同,結(jié)構(gòu)光法又可分為光點(diǎn)式結(jié)構(gòu)光法、光條式結(jié)構(gòu)光法和光面式結(jié)構(gòu)光法等。
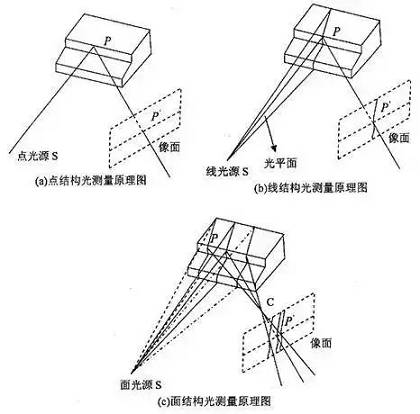
目前應(yīng)用中較廣,且在深度測(cè)量中具有明顯優(yōu)勢(shì)的方法是面結(jié)構(gòu)光測(cè)量法。面結(jié)構(gòu)光測(cè)量將各種模式的面結(jié)構(gòu)投影到被測(cè)物體上,例如將分布較密集的均勻光柵投影到被測(cè)物體上面,由于被測(cè)物體表面凹凸不平,具有不同的深度,所以表面反射回來(lái)的光柵條紋會(huì)隨著表面不同的深度發(fā)生畸變,這個(gè)過(guò)程可以看作是由物體表面的深度信息對(duì)光柵的條紋進(jìn)行調(diào)制。所以被測(cè)物體的表面信息也就被調(diào)制在反射回來(lái)的光柵之中。通過(guò)被測(cè)物體反射回來(lái)的光柵與參考光柵之間的幾何關(guān)系,分析得到每一個(gè)被測(cè)點(diǎn)之間的高度差和深度信息。
結(jié)構(gòu)光的優(yōu)點(diǎn)是計(jì)算簡(jiǎn)單,測(cè)量精度較高,對(duì)于平坦的、無(wú)明顯紋理和形狀變化的表面區(qū)域都可進(jìn)行精密的測(cè)量。其缺點(diǎn)是對(duì)設(shè)備和外界光線要求高,造價(jià)昂貴。目前,結(jié)構(gòu)光法主要應(yīng)用在條件良好的室內(nèi)。
(2)飛行時(shí)間法(ToF)
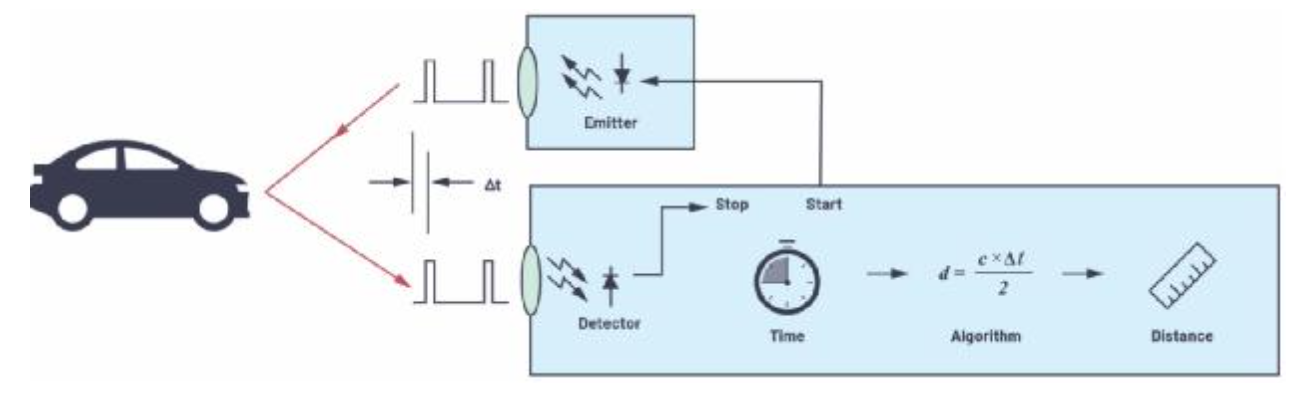
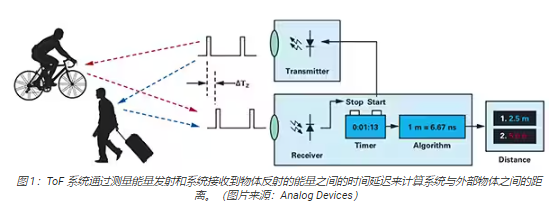
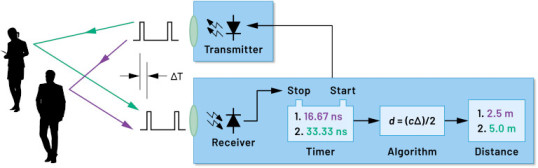
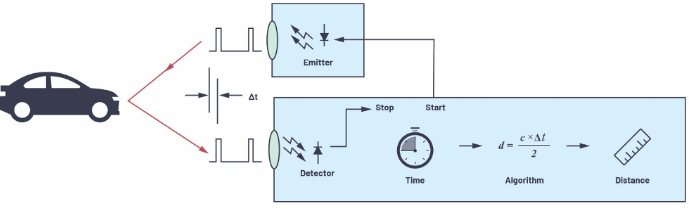
飛行時(shí)間(Time of Flight,簡(jiǎn)稱(chēng)ToF)法,又叫做激光雷達(dá)(LiDAR)測(cè)距法。它將脈沖激光信號(hào)投射到物體表面,反射信號(hào)沿幾乎相同路徑反向傳至接收器,利用發(fā)射和接收脈沖激光信號(hào)的時(shí)間差可實(shí)現(xiàn)被測(cè)量表面每個(gè)像素的距離測(cè)量。
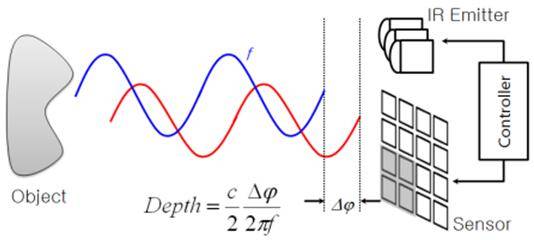
飛行時(shí)間(ToF)深度測(cè)量法的原理示意圖
ToF直接利用光傳播特性,不需要進(jìn)行灰度圖像的獲取與分析,因此距離的獲取不受物體表面性質(zhì)的影響,可快速準(zhǔn)確地獲取景物表面完整的三維信息。缺點(diǎn)則是需要較復(fù)雜的光電設(shè)備,價(jià)格偏貴。
(3)三角測(cè)距法
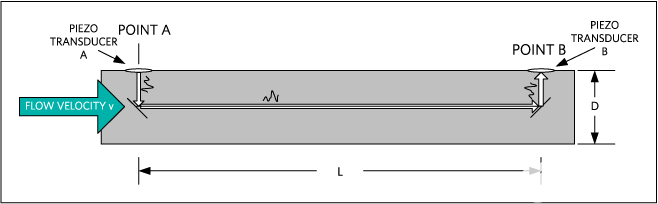
三角測(cè)距法又稱(chēng)主動(dòng)三角法,是基于光學(xué)三角原理,根據(jù)光源、物體和檢測(cè)器三者之間的幾何成像關(guān)系來(lái)確定空間物體各點(diǎn)的三維坐標(biāo)。在實(shí)際測(cè)量過(guò)程中,它常用激光作為光源,用CCD相機(jī)作為檢測(cè)器。這種方式主要用于工業(yè)勘探、工件表面粗糙度檢測(cè)、輪胎檢測(cè)、飛機(jī)檢測(cè)等工業(yè)、航空、軍事領(lǐng)域,在消費(fèi)電子類(lèi)產(chǎn)品還不曾涉及。
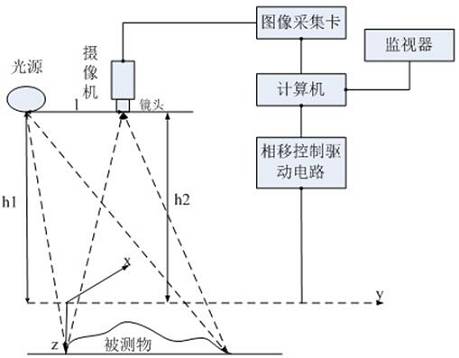
基于激光三角法測(cè)量系統(tǒng)簡(jiǎn)圖
2. 被動(dòng)測(cè)距法
被動(dòng)測(cè)距技術(shù)不需要人為地設(shè)置輻射源,只利用場(chǎng)景在自然光照下的二維圖像來(lái)重建景物的三維信息,具有適應(yīng)性強(qiáng)、實(shí)現(xiàn)手段靈活、造價(jià)低的優(yōu)點(diǎn)。但是這種方法是用低維信號(hào)來(lái)計(jì)算高維信號(hào)的,所以其使用的算法復(fù)雜。被動(dòng)測(cè)距按照使用的視覺(jué)傳感器數(shù)量可分為單目視覺(jué)、雙目立體視覺(jué)和多目視覺(jué)三大類(lèi)。
(1)單目視覺(jué)
單目視覺(jué)是指僅利用一臺(tái)照相機(jī)拍攝一張相片來(lái)進(jìn)行測(cè)量。因僅需要一臺(tái)相機(jī),所以該方法的優(yōu)點(diǎn)是結(jié)構(gòu)簡(jiǎn)單、相機(jī)標(biāo)定容易,同時(shí)還避免了立體視覺(jué)的小視場(chǎng)問(wèn)題和匹配困難問(wèn)題。
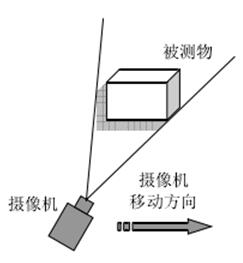
單目視覺(jué)測(cè)量示意圖
單目視覺(jué)方法又可分聚焦法和離焦法兩類(lèi)。聚焦法是指首先使相機(jī)相對(duì)于被測(cè)點(diǎn)處于聚焦位置,然后根據(jù)透鏡成像公式求得被測(cè)點(diǎn)相對(duì)于相機(jī)的距離。相機(jī)偏離聚焦位置會(huì)帶來(lái)測(cè)量誤差,因此尋求精確的聚焦位置是關(guān)鍵所在。而離焦法不要求相機(jī)相對(duì)于被測(cè)點(diǎn)處于聚焦位置,而是根據(jù)標(biāo)定出的離焦模型計(jì)算被測(cè)點(diǎn)相對(duì)于相機(jī)的距離,這樣就避免了由于尋求精確的聚焦位置而降低測(cè)量效率的問(wèn)題,但離焦模型的準(zhǔn)確標(biāo)定是該方法的主要難點(diǎn)。
(2)雙目立體視覺(jué)
雙目立體視覺(jué)的基本原理是從兩個(gè)視點(diǎn)觀察同一景物,以獲取在不同視角下的感知圖像,然后通過(guò)三角測(cè)量原理計(jì)算圖像像素間的位置偏差(視差)來(lái)獲取景物的三維信息。這一過(guò)程與人類(lèi)視覺(jué)感知過(guò)程是類(lèi)似的。
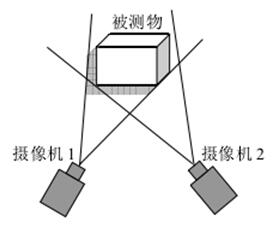
雙目立體視覺(jué)測(cè)量示意圖
在雙目立體視覺(jué)系統(tǒng)的硬件結(jié)構(gòu)中,通常采用兩個(gè)攝像機(jī)作為視覺(jué)信號(hào)的采集設(shè)備,通過(guò)雙輸入通道圖像采集卡與計(jì)算機(jī)連接,把攝像機(jī)采集到的模擬信號(hào)經(jīng)過(guò)采樣、濾波、強(qiáng)化、模數(shù)轉(zhuǎn)換,最終向計(jì)算機(jī)提供圖像數(shù)據(jù)。一個(gè)完整的雙目立體視覺(jué)系統(tǒng)通常可分為數(shù)字圖像采集、相機(jī)標(biāo)定、圖像預(yù)處理與特征提取、圖像校正、立體匹配、三維重建六大部分。
(3)多目立體視覺(jué)
多目立體視覺(jué)系統(tǒng)是對(duì)雙目視覺(jué)系統(tǒng)的一種拓展。所謂多目立體視覺(jué)系統(tǒng),就是采用多個(gè)攝像機(jī)設(shè)置于多個(gè)視點(diǎn),或者由一個(gè)攝像機(jī)從多個(gè)視點(diǎn)觀測(cè)三維景物的視覺(jué)系統(tǒng)。
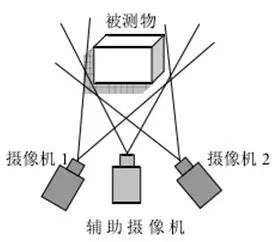
多目視覺(jué)測(cè)量示意圖
對(duì)多目系統(tǒng)所采集到的景物圖像進(jìn)行感知、識(shí)別和理解的技術(shù)被稱(chēng)為多目立體視覺(jué)系統(tǒng)技術(shù)。在雙目立體視覺(jué)中,對(duì)于給定的物體距離,視差與基線長(zhǎng)度成正比,基線越長(zhǎng),對(duì)距離的計(jì)算越精確。但是當(dāng)基線過(guò)長(zhǎng)時(shí),需要在相對(duì)較大的視覺(jué)范圍內(nèi)進(jìn)行搜索,從而增加計(jì)算量。利用多基線立體匹配是消除誤匹配、提高視差測(cè)量準(zhǔn)確性的有效方法之。基線數(shù)目的增加可以通過(guò)增加相機(jī)來(lái)實(shí)現(xiàn)。
光電3D影像技術(shù)
根據(jù)獲取圖像信息方法的不同,光電3D影像技術(shù)分為有源和無(wú)源兩種技術(shù),無(wú)源技術(shù)主要是接受物體的輻射或者環(huán)境的發(fā)射,有源技術(shù)是通過(guò)投射一束調(diào)制的或未調(diào)制的光到物體上通過(guò)檢測(cè)物體反射的光來(lái)形成3D圖像。
以前大多數(shù)技術(shù)研究集中在無(wú)源3D技術(shù)上,利用三角測(cè)量原理,通過(guò)兩臺(tái)相距一定距離的照相機(jī),左邊照相機(jī)產(chǎn)生的圖像表示深度信息,右邊照相機(jī)產(chǎn)生差異的二維圖像。關(guān)鍵是產(chǎn)生深度信息的照相機(jī)需要分離出深度信息。無(wú)源3D影像技術(shù)需要拍攝的物體具有突出的輪廓特點(diǎn),比如邊緣、角、線等。其優(yōu)點(diǎn)是不需要特殊的硬件條件,并成功使用在好幾個(gè)方面。這種技術(shù)的缺點(diǎn)是需要兩臺(tái)或者更多的高質(zhì)量的照相機(jī)、圖像處理軟件。圖像質(zhì)量、拍照速度、數(shù)據(jù)傳輸?shù)榷际沁@種機(jī)制能否被廣泛應(yīng)用的限制因素。
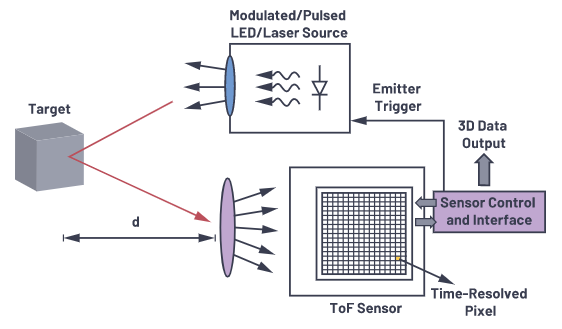
有源3D光電圖像方法是投射一束有規(guī)律的空間分布的線狀光到物體上從而產(chǎn)生一個(gè)網(wǎng)狀格的深度。廣泛使用的有源光方法是飛行時(shí)間(time off light)方法,最近幾年,市場(chǎng)上出現(xiàn)的3D照相機(jī)都是基于飛行時(shí)間方法,這些3D照相機(jī)主要應(yīng)用于工業(yè)控制。SwissRanger3000照相機(jī)是最近應(yīng)用這種技術(shù)的產(chǎn)品,通過(guò)飛行時(shí)間方法檢測(cè)相位來(lái)實(shí)現(xiàn)3D影像。一束幾十兆赫茲被調(diào)制的近紅外光照射到物體上,物體反射的光進(jìn)入3D照相機(jī),由于立體物體的遠(yuǎn)近距離不同,反射光的相位存在一個(gè)延遲,通過(guò)檢測(cè)原始光束以及反射光束的相位延遲從而檢測(cè)出物體的景深,從而實(shí)現(xiàn)3D圖像。這種3D圖像傳感器的制作由ZMD公司完成,ZMD公司根據(jù)3D圖像傳感器需要高速的特點(diǎn)從噪聲和速度進(jìn)行工藝優(yōu)化,響應(yīng)速度可以到100MHz以上。
3D視覺(jué)圖像傳感器技術(shù)
不管是多個(gè)照相機(jī)形成的3D無(wú)源影像技術(shù),還是以飛行時(shí)間方為原理的有源3D影像技術(shù),整個(gè)系統(tǒng)的價(jià)格都很高、功耗大、需要復(fù)雜的校正軟件。在有源3D影像技術(shù)中可以獲得高精度的3D圖像,但是要求傳感器的工作響應(yīng)速度很高,在現(xiàn)有技術(shù)情況下,不得不降低圖像的分辨率。目前研究3D影像技術(shù)主要集中在基于CCD或者CMOS圖像傳感器的3D實(shí)現(xiàn)方法、圖像處理和顯示的研究,真正開(kāi)展視覺(jué)傳感器研究的很少。
一種新的3D視覺(jué)圖像傳感器技術(shù),可以單芯片實(shí)現(xiàn)3D拍照的功能,同時(shí)可以輸出2D的影像,并輸出高分辨率的3D圖像。這種圖像傳感器技術(shù)并不需要額外的有源光照,通過(guò)電子快門(mén)控制曝光時(shí)間,獲得高速的視頻圖像,通過(guò)自動(dòng)對(duì)焦處理,形成景深影像。這種3D傳感器技術(shù)很適合于低價(jià)格、小型化的視覺(jué)應(yīng)用系統(tǒng),比如手機(jī)等多媒體應(yīng)用。
該系統(tǒng)由兩部分構(gòu)成,3DCMOS圖像傳感器以及可變焦的液體鏡頭兩部分構(gòu)成,其中3DCMOS圖像傳感器集成光電轉(zhuǎn)變電路、低噪聲讀出電路、噪聲抑制電路、可編程放大電路、模數(shù)轉(zhuǎn)換器電路、曝光控制電路、壞像素糾正電路、彩色空間轉(zhuǎn)換電路、自動(dòng)白平衡電路以及多媒體圖像信號(hào)處理電路等功能。
圖1是傳統(tǒng)2D與提出的3D拍照?qǐng)D像傳感器芯片與系統(tǒng),圖1(a)是傳統(tǒng)2D拍照?qǐng)D像傳感器芯片與系統(tǒng),圖中主要包括2DCMOS圖像傳感器芯片和定焦鏡頭,當(dāng)拍照的時(shí)候,物體上所有的像素點(diǎn)都映射到AA'平面上,因此系統(tǒng)拍照得到的是一個(gè)2維圖像。圖2(b)是提出的3D拍照?qǐng)D像傳感器芯片與系統(tǒng),圖中主要包括3DCMOS圖像傳感器芯片和液體變焦鏡頭。其中3DCMOS圖像傳感器芯片的特點(diǎn)是響應(yīng)速度快、動(dòng)態(tài)范圍高、具有焦距判斷、輸出控制信號(hào)改變液態(tài)鏡頭的功能。液態(tài)變焦鏡頭是近兩年發(fā)展起來(lái)的新型變焦鏡頭,通過(guò)改變施加在液體上的電壓而改變焦距,比如拍照AA'平面時(shí),液體變焦鏡頭的形狀如圖中的實(shí)線所示,如果拍照BB'平面時(shí),液體變焦鏡頭的形狀如圖中的虛線所示,在AA'與BB'平面之間可以拍照多幅圖像,分析這些圖像的輪廓并合成這些圖像的邊緣,就可以得到一幅完整的3D圖像。這種3D拍照?qǐng)D像傳感器系統(tǒng)具有分辨率高,根據(jù)預(yù)設(shè)拍照的照片個(gè)數(shù)的多少而得到更精確的景深照片。與傳統(tǒng)的光學(xué)變焦鏡頭相比,這種液體變焦鏡頭的優(yōu)勢(shì)是響應(yīng)快、變焦快,適合于快速變焦的應(yīng)用場(chǎng)合。
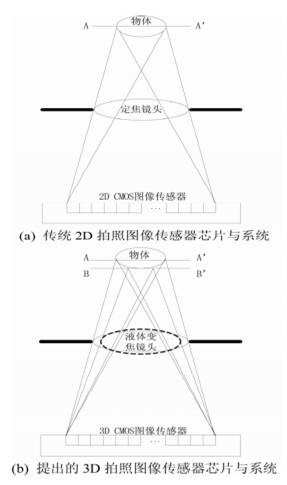
圖2是3DCMOS圖像傳感器芯片的示意圖,圖中的像素單元電路具有靈敏度高、暗電流小、噪聲低等優(yōu)點(diǎn),行譯碼電路和列譯碼電路在時(shí)序控制電路的控制下產(chǎn)生像素陣列工作的時(shí)序,噪聲抑制電路消除信號(hào)通路帶來(lái)的噪聲,經(jīng)過(guò)模數(shù)轉(zhuǎn)換器將模擬信號(hào)轉(zhuǎn)換為數(shù)字信號(hào),并輸給邏輯產(chǎn)生與數(shù)字信號(hào)處理電路,邏輯產(chǎn)生與數(shù)字信號(hào)處理電路產(chǎn)生控制信號(hào)控制感光陣列的曝光時(shí)間,并集成白平衡處理、彩色差值、焦距判斷、輪廓提取等功能。其中模數(shù)轉(zhuǎn)換器是多分辨率的模數(shù)轉(zhuǎn)換器,在拍照2D圖像時(shí)輸出10bit的數(shù)據(jù),當(dāng)拍照3D圖像時(shí),僅僅輸出二值化的圖像信息。同時(shí)電路可以集成電源管理、鎖相環(huán)電路模塊、I2C控制總線,這正是CMOS圖像傳感器的優(yōu)勢(shì)所在(與CCD圖像傳感器相比,CCD不能單芯片集成)。
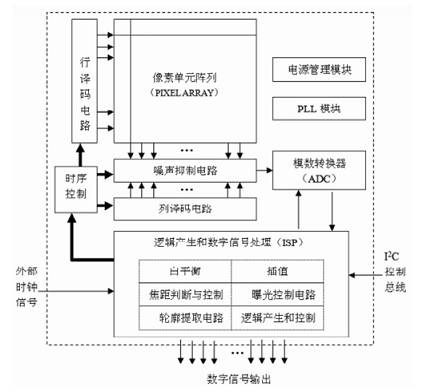
圖3表示3DCMOS圖像傳感器芯片及系統(tǒng)工作的時(shí)序圖,其中長(zhǎng)曝光時(shí)間拍攝的是正常的2D圖像,后續(xù)短曝光拍攝的是景深圖像,從AA'到BB'平面可以連續(xù)自動(dòng)拍照,從而產(chǎn)生合成3D影像的景深圖像。當(dāng)3DCMOS圖像傳感器芯片工作于2D圖像拍照模式時(shí),模數(shù)轉(zhuǎn)換器輸出10位的數(shù)據(jù)給數(shù)字信號(hào)圖像處理模塊,當(dāng)3D CMOS圖像傳感器芯片工作于3D圖像拍照模式,模數(shù)轉(zhuǎn)換器輸出二值化的圖像信息,因此3D CMOS圖像傳感器芯片可以工作于高速拍照的模式,從而獲得高速視頻信息。
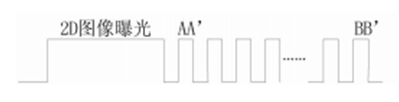
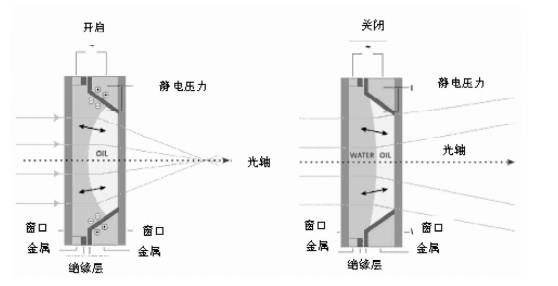
圖4是法國(guó)Varioptic公司的液體變焦鏡頭示意圖。液體變焦鏡頭由法國(guó)Varioptic發(fā)明,其原理是將兩種液體固定在不同的容器中,再它們之間加裝一個(gè)金屬電極,電極中間注入導(dǎo)電液體,當(dāng)施加在電極上的電壓發(fā)生改變時(shí),容器中的具有極性的水分子發(fā)生漂移,從是兩種液體容器中的液體形狀發(fā)生改變,根據(jù)變形的程度來(lái)改變焦距。最大特色是其具備幾乎是無(wú)限寬廣的變焦范圍,更快反映速度及更出色光學(xué)性能,可以應(yīng)用在可拍照手機(jī)、數(shù)碼相機(jī)以及PDA等等設(shè)備上。其電壓控制信號(hào)由3D CMOS圖像傳感器芯片可編程提供或者自動(dòng)等間距提供。
3D新影像技術(shù)的關(guān)鍵技術(shù)之一的視覺(jué)圖像攝取器件的原理和實(shí)現(xiàn)方法。與傳統(tǒng)的3D視覺(jué)傳感器技術(shù)相比,具有結(jié)構(gòu)簡(jiǎn)單、實(shí)現(xiàn)方便、價(jià)格低廉的優(yōu)點(diǎn),便于便攜式多媒體設(shè)備的應(yīng)用,可以彌補(bǔ)目前3D傳感裝置的缺點(diǎn)。
編輯:黃飛
?






















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論