 電子發(fā)燒友App
電子發(fā)燒友App


生物學(xué)家研究發(fā)現(xiàn), ?經(jīng)過數(shù)億年的進(jìn)化, ?多種昆蟲都進(jìn)化出了感知天空偏振光方位角并將其用于導(dǎo)航的奇異能力, ?以幫助其完成覓食、歸巢及遷徙等行為. ?
受到昆蟲奇特偏振光導(dǎo)航能力的啟發(fā), ?基于天空偏振光的天文導(dǎo)航技術(shù)已成為仿生導(dǎo)航技術(shù)領(lǐng)域的研究熱點(diǎn), ?研究人員已開發(fā)出多種模仿生物偏振導(dǎo)航結(jié)構(gòu)和機(jī)理的偏振導(dǎo)航傳感器, ?并且該類傳感器正朝著微型化及集成化方向發(fā)展. ?
已取得的研究成果表明該導(dǎo)航手段具有完全自主、誤差不隨時(shí)間累積和實(shí)時(shí)性好等優(yōu)點(diǎn), ?可為無人機(jī)、交通運(yùn)輸、科學(xué)研究及資源勘測(cè)等社會(huì)各領(lǐng)域提供一種行之有效的導(dǎo)航手段.?
導(dǎo)航本領(lǐng)是動(dòng)物及人類生存和發(fā)展的基本能力,?如動(dòng)物覓食、歸巢及長(zhǎng)途遷徙等均依賴于其所具有的特定導(dǎo)航定位能力. ?從煙霧信號(hào)、天體導(dǎo)航到指南針、航海精密計(jì)時(shí)器再到地基無線電導(dǎo)航及天基無線電導(dǎo)航, ?導(dǎo)航定位技術(shù)的每次革新無不加速了人類的進(jìn)步. ?
隨著信息時(shí)代的到來, ?導(dǎo)航定位技術(shù)越發(fā)凸顯出其重要意義, ?在軍事、交通運(yùn)輸、水利水電、海洋漁業(yè)、氣象測(cè)報(bào)、國(guó)土測(cè)繪、減災(zāi)救災(zāi)和公共安全等領(lǐng)域具有不可替代的作用, ?牽引推動(dòng)了電子、通信、機(jī)械制造、地理信息等相關(guān)產(chǎn)業(yè)和信息服務(wù)業(yè)的發(fā)展, ?產(chǎn)生了顯著的經(jīng)濟(jì)效益和社會(huì)效益. ?
目前應(yīng)用較多的導(dǎo)航定位技術(shù)主要包括慣性導(dǎo)航、陸基及天基無線電(衛(wèi)星)導(dǎo)航和天文導(dǎo)航. ?慣性導(dǎo)航系統(tǒng)主要包括加速度計(jì)及陀螺儀, ?其通過對(duì)測(cè)量得到的加速度進(jìn)行積分, ?得到被測(cè)載體的速度及位移. ?無線電導(dǎo)航技術(shù)通過處理接收到的無線電信號(hào)的振幅、頻率、時(shí)間和相位等信息, ?得到載體與多個(gè)無線電基站(衛(wèi)星)的相對(duì)速度及距離, ?實(shí)現(xiàn)導(dǎo)航定位. ?
目前全球定位系統(tǒng)(global ?positioning ?system,?GPS)、伽利略系統(tǒng)及我國(guó)的北斗系統(tǒng)等天基無線電導(dǎo)航系統(tǒng)的應(yīng)用已十分廣泛. ?天文導(dǎo)航利用對(duì)自然天體的測(cè)量來確定自身位置和航向, ?是一種完全自主的導(dǎo)航方式.??
與慣性導(dǎo)航系統(tǒng)相比, ?天文導(dǎo)航系統(tǒng)誤差不隨時(shí)間積累, ?而與GPS等無線電導(dǎo)航技術(shù)相比又不易受到欺騙、干擾和破壞. ?目前, ?現(xiàn)代天文導(dǎo)航系統(tǒng)主要以星敏感器、紫外月球敏感器和紅外地球敏感器作為探測(cè)部件, ?通過星圖搜索匹配技術(shù)實(shí)現(xiàn)導(dǎo)航定位. ?生物學(xué)家研究發(fā)現(xiàn), ?多種昆蟲經(jīng)過35億年的進(jìn)化形成了精巧的復(fù)眼器官, ?具備了利用復(fù)眼偏振識(shí)別結(jié)構(gòu)感知天空偏振矢量場(chǎng)信息, ?獲得導(dǎo)航定位的能力, ?為人類研究新型自主導(dǎo)航器件提供了很好的模仿對(duì)象. ?
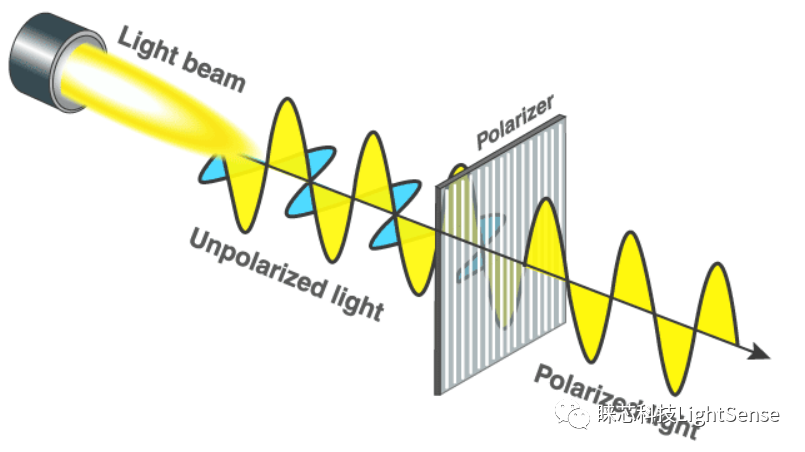
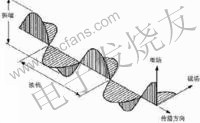
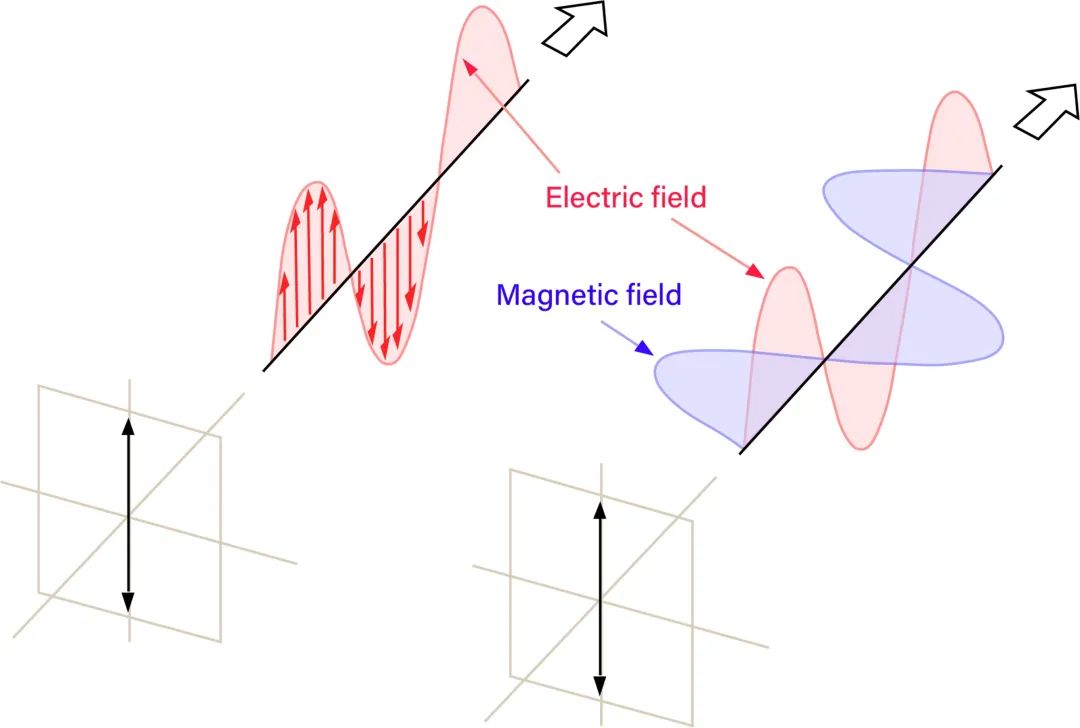
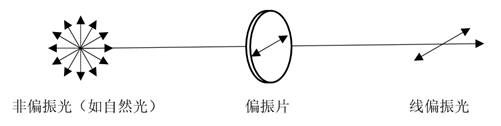
受到昆蟲奇特偏振光導(dǎo)航能力的啟發(fā),?國(guó)內(nèi)外多位學(xué)者通過模仿昆蟲的偏振敏感結(jié)構(gòu)及偏振導(dǎo)航機(jī)制, ?對(duì)仿生偏振光導(dǎo)航機(jī)理、方法與手段進(jìn)行了大量研究, ?并開發(fā)出多種偏振導(dǎo)航傳感器. ?昆蟲的天空偏振光導(dǎo)航生物機(jī)理太陽光經(jīng)過大氣照射地表的過程中發(fā)生散射,?散射光發(fā)生極化進(jìn)而形成具有規(guī)律性分布的天空偏振矢量場(chǎng).?
該矢量場(chǎng)的分布模式主要包括偏振光方位角分布模式與偏振度分布模式. ?學(xué)者大量研究表明, ?晴朗天空下, ?天空偏振光方位角分布模式基本符合Rayleigh散射理論; ?在云、霧等氣溶膠條件下?,?相較于晴朗天空, ?由于多次散射的影響, ?天空散射光的偏振度會(huì)大幅下降, ?但偏振光方位角分布模式受天氣條件影響較小, ?基本保持穩(wěn)定.? ?
生物學(xué)家研究發(fā)現(xiàn), ?經(jīng)過35億年的進(jìn)化, ?多種昆蟲、遷徙鳥類、某些兩棲類、爬行類及哺乳類中的蝙蝠都進(jìn)化出了感知天空偏振光方位角并將其用于導(dǎo)航的奇異能力, ?以幫助其完成覓食、歸巢及遷徙等行為.?
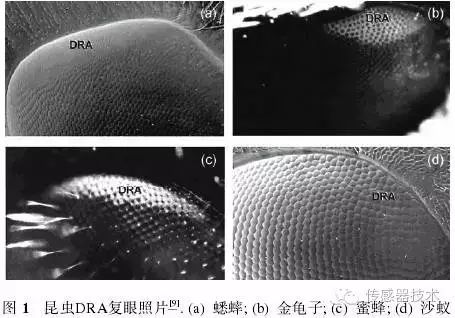
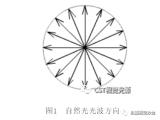
1949年, Frisch發(fā)現(xiàn)蜜蜂可利用天空紫外偏振光進(jìn)行導(dǎo)航, ?其后沙蟻、蟋蟀、蝗蟲、蝴蝶甚至夜行性蜣螂等昆蟲的偏振光導(dǎo)航能力也被陸續(xù)發(fā)現(xiàn). ?生物行為學(xué)及形態(tài)學(xué)實(shí)驗(yàn)研究顯示, ?具有偏振光導(dǎo)航能力的昆蟲, ?其復(fù)眼背部邊緣區(qū)域(dorsal rim area, DRA)內(nèi)一些排列規(guī)則的特殊小眼(圖1)對(duì)偏振光非常敏感. ?
以蝗蟲眼部DRA區(qū)域的小眼結(jié)構(gòu)為例, ?其結(jié)構(gòu)如圖2所示. ?小 眼長(zhǎng)度在350~450 ?um, ?橫截面積只有70 ?um2左右.??
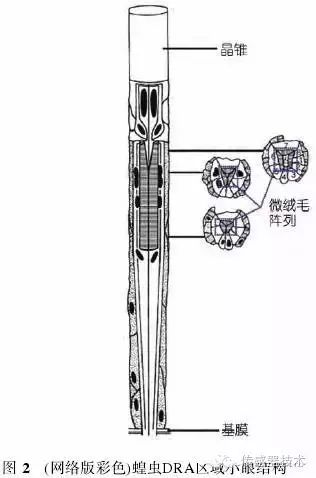
小眼由晶錐、感桿束、基膜等組成, ?晶錐主要起屈光和保護(hù)作用. ?感桿束中有數(shù)個(gè)小網(wǎng)膜細(xì)胞(或稱為感桿細(xì)胞), ?小網(wǎng)膜細(xì)胞由細(xì)胞膜向中腔伸出大量的微絨毛,?微絨毛的排列形式對(duì)光偏振處理有決定性作用. ?
基膜存在于小眼底部, ?小眼的軸突通過基膜與神經(jīng)節(jié)相聯(lián)系, ?進(jìn)而對(duì)光信號(hào)進(jìn)行處理. ?通 過進(jìn)一步的組織學(xué)及電生理學(xué)實(shí)驗(yàn), ?研究人員發(fā)現(xiàn)一般小眼神經(jīng)感桿內(nèi)微絨毛排列雜亂無章, ?而DRA小眼神經(jīng)感桿內(nèi)微絨毛
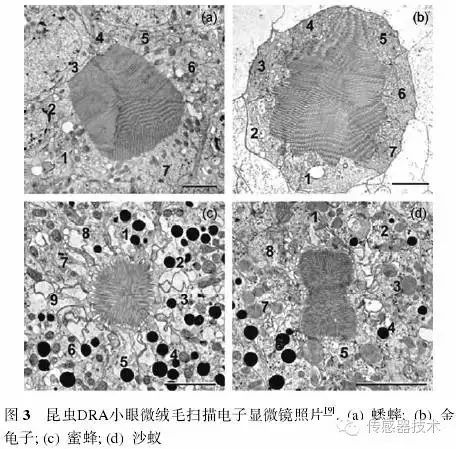
圖3的空間排列具有軸向規(guī)則一致、徑向相互垂直的特點(diǎn), ?該結(jié)構(gòu)特點(diǎn)不僅使視神經(jīng)細(xì)胞具有較高的偏振光敏感特性, ?并且通過神經(jīng)感桿的偏振光電矢量正交敏感結(jié)構(gòu)與中樞神經(jīng)層視神經(jīng)葉部分的偏振對(duì)立神經(jīng)元(polarization-opponent ?neurons,?POL-neurons)的協(xié)同作用, ?使昆蟲的偏振視覺系統(tǒng)具有極低的光強(qiáng)依賴性, ?即“弱光強(qiáng)化, ?強(qiáng)光弱化“的特點(diǎn). ?
?
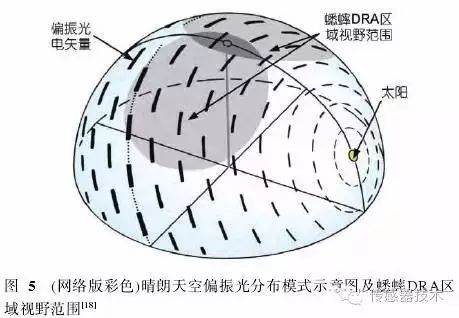
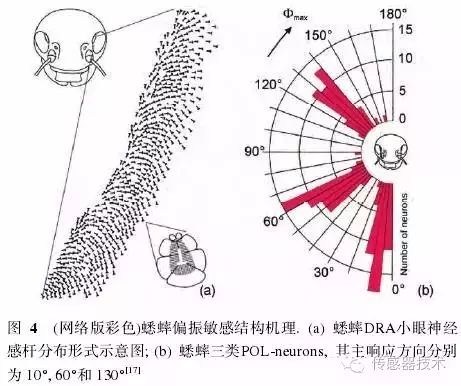
研究發(fā)現(xiàn), ?蟋蟀具有三類POL-neurons, 其主響應(yīng)方向分別為10°, ?60°和130°(圖4), ?蟋蟀通過對(duì)三類POL-neurons輸出信號(hào)進(jìn)行綜合處理, ?即可得出體軸與太陽子午線的夾角, ?從而實(shí)現(xiàn)導(dǎo)航功能. 同時(shí), DRA內(nèi)眾多偏振光敏感小眼的綜合視野范圍寬廣(圖5), ?昆蟲可對(duì)視野內(nèi)的偏振信息進(jìn)行整?合, ?進(jìn)而增強(qiáng)偏振視覺系統(tǒng)的魯棒性及絕對(duì)靈敏??度, ?降低視野內(nèi)云、樹葉等干擾因素的影響, ?使其在多種天氣、光照條件下都能較好地進(jìn)行偏振光導(dǎo)航。
高集成度仿生復(fù)眼原理無人機(jī)導(dǎo)航
小型無人機(jī)上的微小人造復(fù)眼是利用昆蟲的視覺系統(tǒng)原理制造而成,可以幫助小型無人機(jī)在飛行過程中即使受到周圍環(huán)境嘈雜、狹窄、雜亂的干擾,也能夠準(zhǔn)確地避免碰撞,這也是具備實(shí)用性小型自主飛行系統(tǒng)的關(guān)鍵一步。
小型無人機(jī)的研究屬于一個(gè)新興方向,近年來已經(jīng)在公共研究室和私人研究室中廣泛涉及。這些微型無人機(jī)可以執(zhí)行監(jiān)視任務(wù),也可以用于監(jiān)控災(zāi)區(qū)或幫助人類運(yùn)輸貨物。但目前來說,開發(fā)微型導(dǎo)航系統(tǒng)仍有很多工作要做,特別是對(duì)密閉空間。其中的避免碰撞仍然是微型無人機(jī)需要迎接的主要技術(shù)挑戰(zhàn),瑞士聯(lián)邦理工學(xué)院的智能系統(tǒng)實(shí)驗(yàn)室主任Dario Floreano指出。
有些人試圖利用數(shù)碼相機(jī)、激光雷達(dá)等系統(tǒng)來解決這個(gè)問題,但這些系統(tǒng)過于笨重,耗能發(fā)熱嚴(yán)重(堆資源,這是典型的地面思維。空中要做減法),而無人機(jī)需要的是一種小型、輕量級(jí)的設(shè)備,包括Floreano在內(nèi)的若干具有空中思維意識(shí)的研究人員開始以昆蟲的視角來尋找問題的答案。昆蟲這個(gè)空中老師已進(jìn)化了上億年,它選擇的技術(shù)路線不容置疑,昆蟲復(fù)眼小,且空間分辨率較低,但是對(duì)光線的變化高度敏感(目標(biāo)物的運(yùn)動(dòng))使得它們?cè)陲w行過程中有效地避免了碰撞。
該研究團(tuán)隊(duì)最近利用這一原理開發(fā)出了一種新型復(fù)眼傳感器,該傳感器只有兩毫克重,體積僅僅兩立方毫米,可以檢測(cè)出從光線很暗的室內(nèi)到光線明亮的室外的運(yùn)動(dòng)狀況,其檢測(cè)速度是飛蟲的3倍,F(xiàn)loreano說。
這種人造復(fù)眼是由鏡頭上的三個(gè)電子光電探測(cè)器排列成一種三角模式制備而成。通過結(jié)合單個(gè)的光電探測(cè)器進(jìn)行測(cè)量,該設(shè)備可以感知物體的運(yùn)動(dòng)速度和方向。
處理信號(hào)的算法也已經(jīng)被研究人員開發(fā)出來,該設(shè)備可以制備成小芯片,來計(jì)算物體之間的距離或者潛在碰撞發(fā)生的時(shí)間。該團(tuán)隊(duì)目前的工作重點(diǎn)之一是將該設(shè)備集成到小型天線平臺(tái)(如實(shí)驗(yàn)室最近開發(fā)的可折疊四旋翼直升機(jī))上。
Floreano說,現(xiàn)在面臨的挑戰(zhàn)是將多個(gè)人造復(fù)眼結(jié)合起來,迅速提高復(fù)眼集成度,安裝在無人機(jī)上,使無人機(jī)可以“看到周圍物體”,從而避免碰撞,在其飛行過程中,著陸和起飛時(shí)保持穩(wěn)定。適合無人機(jī)的大規(guī)模集成復(fù)眼重量不能超過50克,不然會(huì)降低無人機(jī)的有效載荷。
編輯:黃飛
?

















 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論