 電子發燒友App
電子發燒友App


機器人驅動電路模塊 - 電路圖天天讀(30):智能語音識別避障機器人電路模塊設計
本文導航
- 第 1 頁:電路圖天天讀(30):智能語音識別避障機器人電路模塊設計
- 第 2 頁:電源接口電路模塊
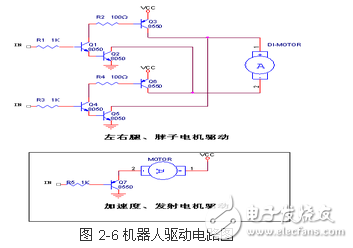
- 第 3 頁:機器人驅動電路模塊
- 接口電路(56553)
- 生物識別(52190)
- 智能硬件(106010)


相關推薦

SPCE061A語音識別機器人應用方案
為了提高廣大單片機愛好者學習單片機的興趣,凌陽科技大學計劃教育推廣中心推出了應用SPCE061A作為主控制器,外加電機驅動電路制作的語音識別機器人。該機器人采用特定人語音識別對機器人進行控制,可以
2011-03-08 17:09:02
基于Arduino UNO的避障機器人
本方案是一個基于 Arduino UNO 的避障機器人。障礙物檢測和避免可以被認為是設計移動機器人的核心問題。避障機器人是一種智能機器人,可以自動感知并克服其路徑上的障礙物。它包含一個
2022-12-22 14:49:25 1
1
1導航避障激光雷達
算法優化升級,建圖更快速、精準 抗強光干擾能力強,適用于各類機器人的建圖、導航及避障先進的光學和算法系統,對強光、 黑白物體、高反物體等均擁有卓越 的探測性能產品輕薄小巧,適用于嵌入各類服 務機器人機體
2022-07-01 10:52:11
智能機器人避障安全性概述
對于載重移動機器人與活動的人員及復雜工廠環境而言,智能AGV搬運機器人的安全性是其設計的重中之重。安全性自然成為了很多企業最關心的。 現在很多企業都都會選擇國外AGV,國外的就AGV安全避障就一定
2021-12-08 09:35:44 414
414
414基于51單片機超聲波紅外避障語音導盲儀設計(全套資料)
單片機的超聲波紅外避障語音導盲儀設計-(電路圖+程序源碼+論文)本系統采用STC89C52單片機+4位高亮白色LED燈+紅外避障傳感器電路+超聲波電路+光敏電阻模塊+語音報警電路+震動電路+液晶1602電路+電源電路設計而成。1、通過紅外避障傳感器或者超聲波模塊檢測前方障礙物,如果檢測到障礙物,則
2021-11-05 09:36:0034
34機器人避障問題該如何解決
的重要標志,而避障又是實現自主定位導航的基本,它是指機器人在行走時,通過傳感器感知到在其路線規劃上存在的靜態或動態障礙物,按照相應算法進行路徑實時更新,最終繞開障礙物到達目標點。那機器人避障問題又該如何解決
2021-10-14 14:39:391667
1667基于傳感器信息在機器人避障方面的應用研究
多關節機器人為了能在未知或時變環境下自主地工作.應具有感受作業環境和規劃自身動作的能力。為此.必須提高機器人對當前感知環境的快速理解識別及實時避障的能力。實時避障是實現智能化機器人自主工作能力
2021-04-08 08:51:419216
9216機器人避障相關解決方案的器件研究
實現避障與導航的必要條件是環境感知,在未知或者是部分未知的環境下避障需要通過傳感器獲取周圍環境信息,包括障礙物的尺寸、形狀和位置等信息,因此傳感器技術在移動機器人避障中起著十分重要的作用。下面看看超聲波傳感器和激光雷達傳感器在機器人避障中的相關解決方案。
2019-11-23 09:35:07653
653機器人避障解決方案
,而目前思嵐科技激光測距傳感器能幫助機器人實時獲取所在環境的高精度輪廓信息,實現機器人的自主定位、建圖及避障等功能。當然,僅靠激光雷達傳感器是無法達到我們理想中的效果,為此,思嵐科技推出了充當機器人
2019-08-13 14:09:41654
654如何進行簡易避障機器人的設計
針對礦井中的各種災害,設計了一種適合礦井救援的簡易避障機器人。該設計以A1’89c51單片機作為智能機器人的檢測和控制核心,采用紅外光電傳感器實現機器人避障。在硬件設計的基礎上。通過軟件編程,實現了
2019-06-19 17:37:3625
25如何使用16位單片機進行智能循線和避障機器人設計資料說明
本文介紹了一種具有智能循線和避障功能的機器人設計方案,機器人系統包括控制系統的硬件和軟件設計。硬件部分主要包括控莉器、傳感器和電機控制電路,控制器采用16位單片機SPCE061A,循線和避障機器人的驅動采用直流電機驅動,使用紅外傳感器檢測軌跡線和障礙物,實現了機器人的自動控制和語音控制的結合。
2019-06-18 15:49:434
4怎樣制作避障小車
障機器人,除了其制作過程是采用了模塊化的開發思路外,與1號的體型類似且控制電路是一樣的,因此本項目的機器人可看作是1號機器人的升級版本——瘋狂小強二代。
2018-09-18 09:35:0018002
18002移動機器人避障常用傳感器及神經網絡算法
動機器人是機器人的重要研究領域,人們很早就開始移動機器人的研究。移動機器人智能的一個重要標志就是自主導航,而實現機器人自主導航有個基本要求——避障。
2018-05-15 09:30:0312719
12719
單片機控制的機器人避障系統
隨著經濟及科技的快速發展,智能機器人的應用也越來越廣泛。智能機器人能夠通過傳感器來感知外界,并達到避障功能。如何讓機器人在行進過程中識別障礙物并精準避障是一個非常重要的課題。本文通過采用紅外傳感器來
2018-01-30 14:16:302
2移動機器人的避障技術與常用傳感器
移動機器人智能的一個重要標志就是自主導航,而實現機器人自主導航有個基本要求——避障。下面讓我們來了解一下移動機器人的避障,避障是指移動機器人根據采集的障礙物的狀態信息,在行走過程中通過傳感器感知到妨礙其通行的靜態和動態物體時,按照一定的方法進行有效地避障,最后達到目標點。
2016-06-15 14:32:234809
4809移動機器人感測系統電路設計 —電路圖天天讀(236)
超聲波傳感器是移動機器人避障、測距常用傳感器之一。傳感器安裝在機器人上時距離地面不能太近,太近容易產生干擾信號, 而且容易將可以翻越的障礙物當成無法逾越的障礙物。 傳感器兩探頭間的距離不能太遠也不能太近,太遠測量誤差過大, 太近串擾信號過強。
2015-09-01 10:43:152892
2892智能小車主控系統電路設計圖剖析 —電路圖天天讀(218)
介紹一種基于MSP430F2274單片機為核心的智能小車,小車采用超聲波測距技術實現自動避障,同時通過語音模塊來播報出小車與障礙物的距離。
2015-08-06 10:57:2510605
10605




 工商網監
工商網監
評論