 電子發燒友App
電子發燒友App


摘 要
近年來發生的幾場局部戰爭表明,具有自主協同功能的無人機集群協同作戰將是拒止環境下無人作戰的主要發展方向。為提升無人機集群在拒止環境下安全通信的能力,首先對拒止環境下無人機集群的任務階段進行了劃分,而后結合無人機集群在各任務階段的網絡拓撲結構,總結了無人機集群通信網絡所面臨的通信安全問題,提出了相對應的安全防護技術和策略,為保障拒止環境下無人機集群通信網絡安全提供參考。
在 2022 年俄烏軍事沖突中,烏克蘭憑借無人作戰裝備,利用 9 架無人機和 7 艘無人潛艇組成的編隊,向具有拒止防御能力的俄羅斯塞瓦斯托波爾軍港發起突襲,完成了對俄軍事裝備的打擊。此次軍事行動取得的效果進一步證明了現代化戰爭形態正加速向信息化、智能化和無人自主化的方向演進。具有自主、協同功能的無人化集群作戰將在未來戰場上發揮巨大的作戰效能。
隨著世界范圍內軍事科技的不斷變革,先進的防御系統(德國萊茵金屬 ADS、美國薩德)和偽裝干擾技術使未來戰場的透明度越來越低,灰色戰場甚至是黑色戰場將趨于常態化,本文梳理了拒止環境下無人機集群通信面臨的主要問題,進而依據典型任務場景,劃分了拒止環境下無人機集群的任務階段,給出了相應網絡拓撲結構,分析了無人機集群在拒止環境下面臨的通信安全問題。最后,針對存在的通信安全問題提出相應的策略,從而為保障拒止場景下無人機集群通信安全提供參考與借鑒。
1
背景及問題分析
2010 年,美國國防部在《四年防務評估報告》中正式提出了拒止環境的概念,文件將拒止環境定義為在一切領域遲滯和拒止美國的力量投送,并在一定區域內構造強對抗環境,阻止外部勢力介入或干預。拒止環境下,利用高強度的電磁干擾、火力覆蓋、網絡攻擊等手段,會使無人機集群面臨節點失效、通信降級甚至通信中斷的情況,導致無人機集群通信面臨極大的安全風險 。
在無人機集群通信網絡中常見的攻擊手段有針對鏈路的信息竊聽、干擾、消息篡改、中間人攻擊、重放攻擊和 Sybil 攻擊等手段,針對節點的后門攻擊、拒絕服務攻擊、洪泛攻擊等攻擊手段,也有針對網絡的分布式拒絕服務(Distributed Denial of Service,DDoS)攻擊、泛洪(Flooding)攻擊、女巫(Sybil)攻擊、重放攻擊、疲勞攻擊、路由環路等攻擊。Alladi 等人 針對無人機易受到物理捕獲和篡改攻擊,基 于 物 理 不 可 克 隆 函 數(Physically Unclonable Functions,PUF)提出了輕量級密鑰認證和協商方案,通過 PUF 生成秘密信息在無人機和指揮控制中心以及無人機之間建立會話密鑰,方案具有較好的安全性,降低了計算開銷。Frimpong等人 面向無人機應用提出了一種無配對無證書的組密鑰分發方案,該方案通過公私鑰對把多個異構無人機的加密消息構造成組會話密鑰,具有組密鑰管理安全屬性。Tanveer 等人基于 AEAD、EC 和 Hash 函數提出了面向無人機網 絡(Internet of Drones,IoD)的認證密鑰管理協議,提高了密鑰認證協商過程中用戶和無人機的通信安全。Ko 等人針對無人機在軍事上的應用,提出了基于橢圓曲線(Elliptic Curve Diffie-Hellman,ECDH)和橢圓曲線數字簽名算 法(Elliptic Curve Digital Signature Algorithm,ECDSA)的密鑰認證與協商協議,方案使用了基于散列的消息驗證代碼(Hash-based Message Authentication Code,HMAC) 和 ECDSA 進行雙重身份認證,增強了密鑰協商過程的安全性。上述對無人機集群通信網絡的安全防護方案,普遍適用于一般性無人機集群通信網絡,對于拒止環境下的無人機集群任務場景的適用性較差。拒止環境下,無人機集群數據傳輸依靠無人機集群通信網絡完成,下面結合拒止環境特點,首先對無人機集群典型任務場景的任務階段進行劃分,進而給出各場景下的網絡拓撲結構。
2
拒止環境下無人機集群任務階段劃分及網絡拓撲結構
相比常規任務環境,拒止環境有以下特點:
(1)電磁域高強度的信息干擾和對抗,導致通信保障差;(2)通常包括地理域和物理域上的雙重拒止,導致長距離運輸成為突出特點;(3)海陸空協同作戰,多軍種合作廣度、深度增加;(4)有人作戰任務部隊面臨更高的危險。本文根據拒止環境的特點,將拒止環境下的任務分為以下 3 個階段:多平臺運輸投送階段、自組網飛行抵近階段和自主協同任務階段。并基于無人機集群在拒止環境下 3 個任務階段的場景模型,分別采用混合型網絡拓撲結構和分布式網絡拓撲結構。
2.1 多平臺運輸投送階段
根據未來戰爭發展趨勢,無人機集群自主協同作戰將是拒止環境下作戰的重要方式。將多個無人機作戰群組由運輸投送平臺從空域、海域或陸域進行運輸投送,組成可完成任務協同的無人機集群是該階段的主要任務。運輸投送平臺主要包括綜合性能強的母艦、戰略運輸機或陸基發射車,如圖 1 所示。
傳統的無人機集群通信網絡的構成通常是由衛星、地面控制中心和多個無人機作戰群組成的指揮控制通信網絡。為發揮拒止環境下無人機集群作戰的最大作戰效能,減少無人機集群的能源消耗,避免多層級指揮帶來的時延問題,可根據實際的作戰需求將指揮控制中心設置在運輸投送平臺上,指揮籌劃無人機集群作戰行動。在無人機集群投放之前為保障通信安全,需要為執行任務的無人機節點預置各類通信參數,保障拒止環境下無人機集群通信信息安全交互,該階段網絡拓撲結構如圖 2 所示。
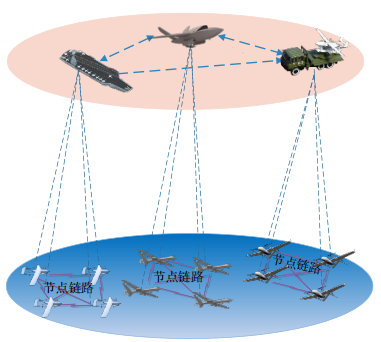
圖 2 混合式網絡拓撲結構
該階段的網絡拓撲結構具有混合型網絡拓撲結構特點。運輸投送平臺在拒止區域外,作為無人機群的中心節點,指揮控制無人機群的飛行和通信交互。中心節點與無人機節點之間形成集中式結構,中心節點與中心節點之間形成分布式網絡結構。經相同運輸投送平臺投送的無人機相互之間形成分布式網絡拓撲結構,完成群組內無人機之間的信息交互。
2.2 自組網飛行抵近階段
在拒止環境下,為了適應任務需求,通常將不同作戰平臺投放的且具有不同特性的無人機進行動態編組,組成功能相對完備的無人機集群,如圖 3 所示。
該階段網絡拓撲結構在第一階段混合式網絡拓撲的基礎上,由來自不同運輸投送平臺的異構無人機根據實際任務情況,結合自身特點的功能模塊進行重構,組成新的且功能相對完備的異構無人機集群 。異構無人機集群無人機節點之間網絡拓撲結構呈現為分布式結構,如圖 4 所示。
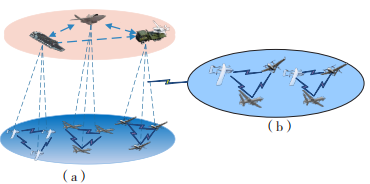
圖 4 自組網飛行階段網絡拓撲結構
2.3 自主協同任務階段
無人機集群的數據鏈路通常分為有效載荷通信和非有效載荷通信。兩種鏈路信息的傳輸均建立在無線通信的基礎上,對傳輸信道的穩定性和安全性要求較高。在拒止環境下,電磁域高強度且復雜的電子對抗容易導致指揮控制中心與無人機之間的通信面臨降級甚至中斷的情況。因此,無人機集群需要根據自身攜帶負載和設定任務情況,自主協同完成拒止環境下的既定任務,如圖 5 所示。
該階段的網絡拓撲延續第二階段的分布式拓撲結構。重構無人機集群進入拒止環境,因受到強電磁干擾將失去與運輸投送平臺上的指揮控制中心的通信功能,重構無人機集群通過分布式網絡拓撲結構實現群組內信息交互,自主協同完成任務,如圖 6 所示。
3
拒止環境下無人機集群安全通信問題分析
隨著無人機自主化水平的不斷提高,在拒止環境下多個無人機群組成任務集群,通過相互之間的協同偵查搜索、協同目標跟蹤、協同對地攻擊等模式實現拒止環境下的復雜任務,發揮作戰效能。但是無人機集群網絡通常以無線方式進行信息傳輸,具有與生俱來的廣播(組播)通信特性,極易受到攻擊者的攻擊,從而制約著無人機集群在拒止環境下作戰效能的發揮。下面結合拒止環境下無人機集群通信網絡的特點,重點分析通信網絡面臨的安全威脅 。
3.1 無人機集群通信網絡鏈路安全
攻擊無人機集群中的通信鏈路主要包括海上指揮控制鏈路、空中指揮控制鏈路及無人機集群內的通信鏈路。一方面,采用被動攻擊方式,通過監聽通信鏈路,竊聽無人機集群指揮鏈路傳輸的任務目標等涉密信息數據進行流量分析,探測無人機集群通信網絡中的指揮中心位置,對其實施精確重點打擊;另一方面,采用主動攻擊方式,對通信鏈路進行無線電頻率干擾攻擊或路徑選擇攻擊,控制篡改通信鏈路傳輸的控制指令或信息數據,進而欺騙無人機節點,導致無人機接收虛假數據或無法接收數據,錯誤判斷敵情,執行錯誤命令或航線,最終導致任務失敗。常見的攻擊手段有:信息竊聽、消息篡改、中間人攻擊、蟲洞攻擊、衛星導航信號欺騙 。
3.2 無人機集群通信網絡節點安全
拒止環境下最突出的特點是來自電磁域的強力拒止,強電磁脈沖是電磁干擾的主要手段。強電磁脈沖可以覆蓋無人機機載設備的工作頻段,造成設備內部噪聲增加或者出現新的干擾信號,影響設備正常工作,造成單個或多個節點失效。例如,強電磁脈沖可能會造成無人機機載數據傳輸設備受到不可逆損壞,使無人機失去信息交互能力,導致無人機節點自行降落或者墜毀 ,影響原有的無人機安全通信網絡。
3.3 無人機集群通信網絡安全
在拒止環境下,針對無人機集群通信網絡攻擊的類型具有和傳統網絡攻擊較為相似的特點,常見的傳統的網絡攻擊手段有:DDoS 攻擊、泛洪(Flooding)攻擊、女巫(Sybil)攻擊、重放攻擊、疲勞攻擊、路由環路攻擊。攻擊者往往利用無人機在拒止環境下各項資源匱乏的缺點,偽造或控制多個惡意節點通過通信手段對無人機集群通信網絡進行攻擊,導致無人機集群通信網絡內大量信息數據冗余,造成網絡通信阻塞,耗盡網絡或計算資源。集群無法進行自主智能協同,進而徹底喪失作戰能力。
4
拒止環境下無人機集群通信網絡安全對策研究
由于無人機集群的通信方式主要依靠無線通信技術,無線通信鏈路的開放性使得無人機集群通信網絡面臨諸多安全問題,下面從拒止環境下無人機集群通信網絡鏈路安全、節點安全和網絡信息安全 3 個方面提出相應的安全對策。
4.1 加密傳輸機制保障集群通信網絡鏈路安全
根據任務需求,無人機集群通信鏈路可以分為指揮控制鏈路和數據鏈路,指揮控制鏈路往往負責下達指揮控制命令和緊急通信,數據鏈路負責節點日常感知數據的傳輸,在分信道進行通信一定程度上可以避免干擾攻擊。同時,通過加密技術對無人機集群的數據鏈路和指揮鏈路進行加密傳輸,即經過一臺節點無人機的所有網絡信息傳輸均需加解密,每一個經過的節點都必須有密碼裝置(如基于軟件的密碼組件或硬件密碼組件),以便解密、加密報文。保護鏈路的安全性,能夠有效地抵御第三方的篡改攻擊和竊聽攻擊。
4.2 分布式網絡節點自主協同認證
分布式的無人機集群是以自主、協同的方式共同執行既定任務的無人機集合,集群在自組網后不依賴固定的中心節點,而是以無中心節點的方式,抵抗關鍵節點失效問題。在拒止環境下的運輸投送階段,設置在運輸投送平臺上的指揮控制中心通過安全途徑向無人機集群制定任務目標和初始參數(如公私鑰對、物理不可克隆函數 PUF 等技術),采用身份認證方式 (如動態密碼認證、數字簽名認證等技術),確保每一個網絡節點均是安全的,能夠使網絡節點的安全性得到提升。
4.3 設計整體密鑰管理方案,提升體系防護能力
在拒止環境下,針對數據交互的需求不同,設計整體化的密鑰以及安全參數的管理方案,合理分配使用公鑰私鑰和預置安全認證參數,利用加密技術在數據鏈路層對傳輸過程或存儲過程中的信息數據進行加解密,實現鏈路安全。在節點層,基于身份 ID 等身份信息認證技術,保障合法的無人機節點能夠參與無人機集群的信息交互,防止偽造無人機節點偽裝欺騙攻擊。優化密鑰管理方案,根據無人機節點加入或退出、群組合并或分裂等拒止環境下的實際任務需求,對密鑰進行更新,確保無人機集群的前向和后向安全性。最后選取輕量化和安全性強的密鑰管理方案,提升無人機集群通信網絡的安全防護能力和生存能力。
5
結 語
隨著現代化戰爭的不斷發展,未來將面臨高度對抗性、高度復雜性、高度動態性和高度拒止的戰場環境。本文對拒止環境下無人機集群的任務階段進行了劃分,分析了無人機集群在拒止環境下不同任務階段的網絡拓撲結構,并對其存在的通信安全問題,提出了針對通信鏈路、節點和網絡體系的通信安全防護策略,全力保障無人機集群在拒止環境下進行安全通信,充分發揮無人機集群作戰的效能。
引用格式:馮志尚 , 袁霖 , 劉軍 . 拒止環境下無人機集群安全通信問題分析 [J]. 信息安全與通信保密 ,2023(4):66-72.
作者簡介 >>> ? ? 馮志尚,男,碩士研究生,主要研究方向為信息安全與密鑰管理; 袁 霖,男,博士,副教授,主要研究方向為信息安全與密鑰管理; 劉 軍,男,碩士研究生,主要研究方向為信息安全與密鑰管理。 編輯:黃飛
?












 工商網監
工商網監
評論