 電子發燒友App
電子發燒友App


摘要:為滿足無人機蜂群作戰運用建模與仿真的需求,采用基于實體行為網絡交互(EBNI:Entity Behavior Network Interaction)的建模方法對無人機蜂群對海作戰進行概念建模。列出了無人機蜂群對海作戰中的實體和任務清單,建立了無人機蜂群對海作戰的任務模型、各類實體的動作模型以及無人機蜂群對海作戰中的內外部交互模型,為無人機蜂群作戰仿真模型研究和系統建設提供參考。
無人機蜂群是利用陸基、海基或空基等平臺搭載的大量低成本、多載荷小型無人機,在預定區域釋放或發射后形成的具備功能分布、自主協同和集群智能等典型特征的無人機機群。無人機蜂群可通過態勢感知和無線網絡實現集群態勢共享,具備編隊飛行、航路規劃、目標分配等自主控制和決策功能,能夠遂行偵察引導、誘騙干擾、協同攻擊等多種作戰任務。
當前無人機裝備建設已進入快速發展階段,對無人機蜂群作戰的建模與仿真研究是開展無人機蜂群作戰實驗、創新無人機蜂群作戰理論的重要支撐。目前對無人機蜂群的建模仿真研究重點集中在算法研究和技術開發層面,包括航路規劃、任務分配、編隊控制、集群協同避障等,國內外對于無人機蜂群作戰運用的建模仿真還比較少。建立無人機蜂群作戰仿真模型及實驗系統,首先要對無人機蜂群作戰行動進行詳細的過程論證和概念分析,以便研究人員從中提取無人機蜂群作戰系統的結構、功能以及行為等關鍵要素和特征,并根據各要素之間的相互關系對其進行精確描述,從而形成軍事人員和建模仿真人員都能夠理解和認可的概念知識體,為構建無人機蜂群作戰仿真模型及系統奠定基礎。
1 概念模型建模方法
軍事概念模型是對現實世界軍事活動的第一次抽象,是軍事人員和系統分析人員根據作戰仿真系統的建設目標和應用范圍等對各類軍事實體、任務、行動、交戰、指揮控制和作戰環境等軍事活動要素的結構化的規范描述,是數學邏輯模型建立的依據,也是仿真模型以及作戰仿真系統的校核、驗證和確認(VV&A)的參照。概念建模方法包括對使命空間進行概念分析的方法以及將分析所得信息進行描述的方法,概念分析側重于思維,概念描述側重于形式。概念模型通常用形式化的語言來描述。目前按照概念模型描述來分類時,概念建模方法可分為兩類:
1)基于過程的概念建模方法,采用分析事物客觀活動規律的方式進行建模,如基于IDEF的概念建模方法、基于XML的概念建模方法等;
2)基于實體的概念建模方法,采用面向對象分析的方法進行設計,如基于UML的概念建模方法等。
無人機蜂群作為新質作戰力量具有功能分布、自主協同以及集群智能等新特點,使得無人蜂群相比于簡單無人機編隊,其技術機理和作戰運用方法發生了重大變化,因此,現有建模方法難以準確描述無人機蜂群的作戰行動。對無人機蜂群作戰行動建模需要進一步考慮以下需求:
一是如何描述單無人機平臺的個體行為,包括局部感知、自主導航、路徑跟蹤、自主避障礙等個體行為能力;
二是如何描述無人機蜂群的群智行為,包括信息共享、信息融合、協同攻擊、任務規劃、航路規劃、飛行編隊自主控制等群體行為能力;
三是如何描述無人機蜂群的內外部交互關系,通常包括內外部兩種關系:
1)蜂群外部交互關系,即蜂群指控中心、任務蜂群和目標等作戰實體之間的交互關系。
2)蜂群內部不同功能個體之間的網絡交互關系。為支撐對抗條件下無人機蜂群作戰的建模與仿真,本文在實體行為網絡交互(EBNI:Entity Behavior Network Interaction)建模框架的基礎上,以無人機蜂群對海作戰任務為例,建立了無人機蜂群對海作戰軍事概念模型。
2 基于EBNI的無人機蜂群對海作戰概念模型
2.1
實體描述
軍事概念模型中的實體是指參與作戰行動的裝備、人員以及組織等。每類實體都有不同的屬性,主要用于描述實體狀態的變化。實體屬性既可以繼承自實體的父類,也可以是自己獨有。根據無人機蜂群作戰運用仿真的目標和要求,將無人機蜂群對海作戰作為軍事概念建模的用例,確定了無人機蜂群對海作戰中實體描述的顆粒度。參與這一過程的實體包括運載平臺、單無人機平臺、無人機蜂群、無人機蜂群指控中心、無人機蜂群網絡以及實施反無人機蜂群作戰的水面艦艇等實體,在無人機蜂群對海作戰過程中,這6類實體主要描述和任務清單如下:
運載平臺實體:主要描述發射、釋放或回收無人機的運載平臺屬性,運載平臺可以是運輸機、驅護艦、戰斗機或潛艇等。
單無人機實體:主要描述作為蜂群基本組成單元的無人機個體的屬性,可基于無人機裝備的戰技術參數指標視角建立無人機個體屬性模型。鑒于目前無人機蜂群裝備的發展現狀,無人機通常是小型且載荷有限,不能同時攜帶雷達、通信、電子戰、武器彈藥等多類載荷系統,因此在對海作戰任務中根據無人機載荷不同,單無人機分為偵察引導、干擾誘騙、對艦打擊。
無人機蜂群實體:描述作為整體的無人機蜂群的屬性,主要說明無人機蜂群內部個體成員間的層次關系和指揮協同關系,為構建無人機蜂群屬性模型、無人機蜂群隊形模型以及執行不同任務的無人機蜂群間的關聯關系等模型提供支撐。由于受通信范圍和個體作戰能力限制,蜂群中的無人機個體并非兩兩均構成聯系,而是存在一定的等級關系。因此在無人機蜂群對海作戰概念模型描述中,無人機蜂群分為指控節點和協同節點。指控節點可對一定范圍內的無人機蜂群進行指揮控制,其有效通信范圍的其他無人機個體設置為協同節點;同時為避免單個指控節點損失或失效造成其他協同節點失能,蜂群中單個節點的指控或協調角色可根據任務需要和通信狀態靈活設置。為描述無人機蜂群的集群運動、實時避障等群智行為,在無人機蜂群實體中可設置引領節點和跟隨節點等屬性的描述,為構建無人機編隊飛行控制算法提供支持。
無人機蜂群指控中心實體:主要描述無人機蜂群控制中心的相關屬性,主要通過衛星或數據鏈通信鏈路以及導航定位系統實現對蜂群的指揮與控制。
無人機蜂群網絡實體:主要描述無人機蜂群之間的自組織網絡拓撲結構的屬性以及在對抗過程中由蜂群自適應行為導致的網絡結構的變化,為蜂群行為建模提供支持,是網絡空間的虛擬實體。
水面艦艇實體:主要描述水面艦艇的機動能力、探測能力、電磁能力、各類武器的使用效能、毀傷以及抗毀傷能力。
2.2
行為描述
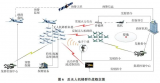
軍事概念模型中,行為包括實體可以執行的任務、動作或任務過程,也稱行動。行動通常有明確目標,由某個實體執行且有一定的時間跨度。行為模型主要描述行為的觸發條件、結束條件以及行為執行主客體的屬性和狀態的變化過程。對無人機蜂群作戰行動進行建模,首先需要對無人機蜂群作戰行動過程進行描述,此處以無人機蜂群對海作戰行動為例進行分析和描述。無人機蜂群對海作戰行動建模如圖1所示。
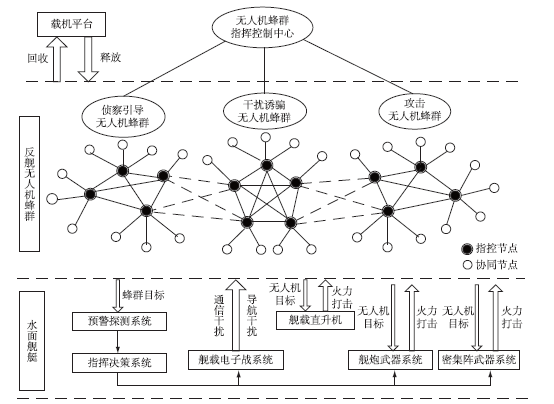
圖1 無人機蜂群對海作戰行動建模示意圖
1)無人機蜂群對海作戰行動流程
① 無人機蜂群形成。運載平臺在安全區域發射無人機,無人機在空中預定區域集結編隊,形成無人機蜂群。無人機蜂群通過衛星或數據鏈通信網絡與蜂群控制站建立連接,蜂群內部則通過自組織網絡建立內部連接。蜂群控制站根據目標任務、無人機載荷情況等對蜂群進行任務分配、航路規劃等。對海作戰任務描述中將無人機蜂群根據任務不同分為偵察引導、干擾誘騙、對艦打擊等3類無人機蜂群,航路規劃和任務分配完畢后,無人機蜂群向目標區機動。
② 偵察識別。負責偵察引導任務的無人機蜂群攜帶雷達、紅外和光電等偵察探測設備,在具有無人機蜂群指控能力的有人機或無人機的指揮與控制下,對預警機難以識別的遠距離水面目標實施抵近偵察,每架無人機可將偵察探測的目標信息通過蜂群網絡進行匯聚、融合、識別和處理,形成戰場目標態勢。
③ 欺騙干擾。負責欺騙干擾的無人機攜帶電子偵察和干擾設備,在具有無人機蜂群指控能力的有人機或無人機的指揮與控制下,模擬有人機的信號特征,誘導敵水面艦艇預警探測系統開機,暴露信號特征,同時吸引水面艦艇的防空火力,為后續兵力的突擊行動提供支援。
④ 協同攻擊。負責攻擊艦艇的無人機可利用自身數量多、雷達紅外特征弱的特點,在具有無人機蜂群指控能力的有人機或無人機的指揮與控制下,攜帶多種類型的武器彈藥,從多個方向對水面艦艇實施飽和攻擊,主要對水面艦艇的雷達、通信、武器、艦島等艦面重要設備設施和人員實施打擊,降低其作戰能力,為后續兵力的補充打擊提供支持。
⑤ 打擊效果評估。攻擊無人機群對艦打擊完成后,偵察無人機群可抵近水面艦艇進行偵察,查明目標毀傷情況,無人機蜂群控制站可根據目標毀傷情況組織二次打擊。
⑥ 無人機蜂群返航和回收。對艦打擊完成后幸存的無人機組成新的無人機蜂群,根據導航信息向運載平臺所在的安全區域機動,在機動過程中可實時根據敵情威脅以及障礙物情況實施規避機動,到達安全區后由運載平臺進行回收。
2)水面艦艇攔截無人機蜂群作戰流程
鑒于單架無人機的雷達反射截面積小、紅外特征較弱,水面艦艇的預警探測系統難以發現,待發現無人機時已無法使用防空導彈對其實施攔截,僅可使用密集陣武器系統和電子戰系統對無人機進行軟硬殺傷。艦載預警探測系統負責對空中目標搜索、跟蹤和識別,將目標數據傳遞給指揮決策系統。指揮決策系統負責確定敵目標數量、優先級,創建艦艇周邊威脅目標態勢。作戰人員根據目標態勢定下交戰決心,將交戰命令、目標優先級傳遞給相應的武器控制系統,其根據收到的交戰命令、目標優先級對目標實施打擊。
2.3
動作模型
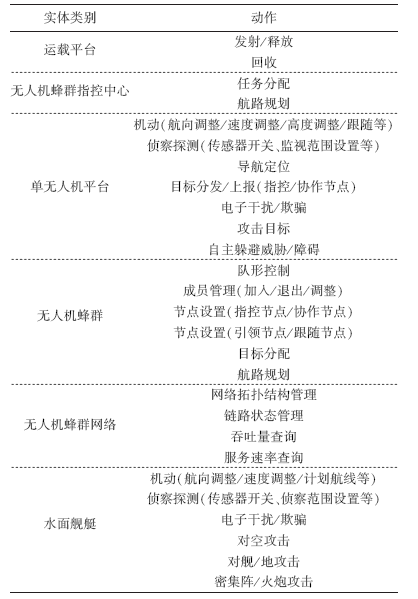
動作是實體所具備的能力或功能屬性,是實體基本和最底層的行為要素。根據抽象等級不同,行動可以逐層分解直至將高層抽象行為分解為具體動作,這通常是由建模仿真目標決定的。在無人機蜂群對海作戰建模中,針對實體的描述建立相應的動作模型列表,如表1所示。
表1 實體動作列表
2.4
網絡化交互模型
交互即實體相互作用的效果,主要描述實體在完成行為的過程中對其他相關實體產生的作用結果,這些效果反映了實體對象屬性和狀態的變化。由于無人機蜂群相比于傳統無人機編隊具備自主協同和自適應行為能力,如在對抗過程中某無人機節點被毀傷或通信中斷,蜂群內部網絡結構的變化可能會導致蜂群節點基于自組織網絡的指控關系和協同關系發生變化,為刻畫蜂群的自適應行為能力需要針對蜂群內部網絡化交互進行建模(如圖2);同時無人機蜂群在完成對海作戰任務過程中,無人機蜂群作戰系統作為整體與目標實體發生的交互也是概念模型需要重點描述的內容。
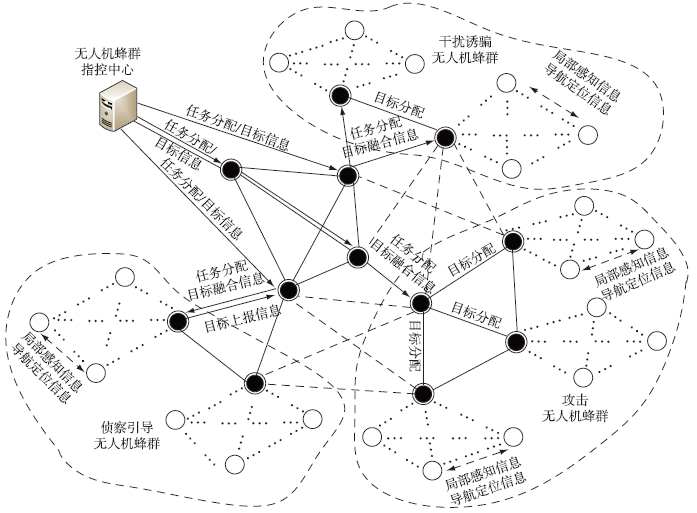
圖2?無人機蜂群內部網絡交互示意圖
1)蜂群內部網絡化交互
為準確描述無人機蜂群的自適應和群智特征,需要對蜂群內部的網絡交互加以描述。對海作戰任務描述中將無人機蜂群根據任務不同分為偵察引導、干擾誘騙、對艦打擊等3類無人機蜂群,每類無人蜂群中都配置了多個不同類型的網絡。在無人機蜂群內部,指控節點與其通信范圍內的其他協調節點組成指控網絡,主要保障指控節點和協調節點之間傳遞和共享目標融合信息、任務分配等相關信息;各協調節點之間構成對等通信網絡,可在協同節點之間共享定位信息、局部感知等信息。根據蜂群任務的不同,偵察引導蜂群、干擾欺騙蜂群以及協同打擊蜂群中的指控節點和無人機蜂群控制中心形成較大空間范圍內的指揮控制網絡,主要傳遞目標信息、航路規劃以及任務分配等信息。
2)蜂群外部交互
為描述無人機蜂群對海作戰過程中的外部交互,建立無人機對海作戰運用仿真模型及系統開展無人機蜂群作戰概念驗證以及裝備作戰運用研究,建立無人機蜂群對海作戰交互示意如圖3所示。通過定義無人機蜂群指控中心、無人機運載平臺、無人機蜂群指控節點、任務蜂群和水面艦艇目標等5類作戰實體間帶有順序和時間屬性的交互示意圖,動態描述“成功完成一次無人機蜂群對海作戰任務”所要完成的作戰活動及外部交互。
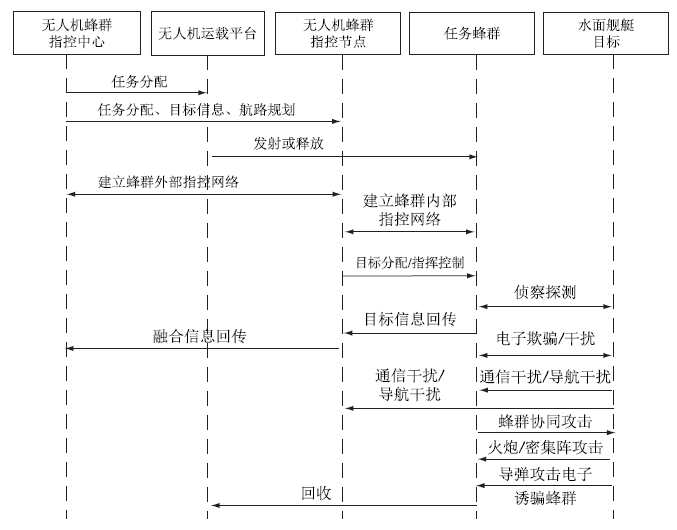
圖3??無人機蜂群對海作戰交互示意圖
3 結束語
軍事概念模型將軍事行動描述成軍事、建模仿真等各領域人員容易理解、易用、結構化和規范化的信息,能夠為軍事領域專家和系統開發人員提供溝通的橋梁。EBNI建模方法是對傳統概念建模的方法的擴展,對無人機蜂群作戰的概念建模有一定的優勢。本文以無人機蜂群對海作戰任務為例,基于EBNI的概念建模方法對無人機蜂群對海作戰行動進行了詳細描述,對于無人機蜂群對海作戰行動的具體任務、作戰實體以及在行動過程中產生的各類動作和交互進行了詳細描述,建立了無人機蜂群對海作戰概念模型。模型為無人機蜂群作戰仿真模型和系統的研究打下了基礎,使得軍事和建模仿真等不同領域的人員能夠對無人機蜂群作戰仿真的理解和認識達成一致。隨著無人機蜂群裝備的不斷發展,無人機蜂群作戰運用的研究必將逐漸走向深入,下一步將針對無人機蜂群作戰建模的算法和數據需求進行深入研究。
?作? ?者:吳濤,馮偉強,張昊
編輯:黃飛












 工商網監
工商網監
評論