本文主要介紹的是關于ldc1000的輸出量問題,以及ldc1000的采集值和應用分析,希望通過本文能讓你對ldc1000有更全面的認識。
ldc1000
LDC1000 是世界首款電感到數字轉換器。提供低功耗,小封裝,低成本的解決方案。 它的 SPI?接口可以很方便連接?MCU。LDC1000 只需要外接一個 PCB 線圈或者自制線圈就可 以實現非接觸式電感檢測。LDC1000 的電感檢測并不是指像 Q 表那樣測試線圈的電感量, 而是可以測試外部金屬物體和 LDC1000 相連的測試線圈的空間位置關系。
ldc1000引腳圖
ldc1000輸出量是模擬的嗎
在模擬半導體行業擁有近 20 年經驗的德州儀器 (TI)傳感器信號路徑產品線經理Jon Baldwin向記者展示了LDC1000的優越性能,無論低成本 PCB 線跡或金屬,亦或是人體傳感,LDC1000都能 迅速傳感并顯示精確的結果。現有的傳感器,如低成本的OHMIC開關傳感器在灰塵等惡劣環境下不可靠,FSR壓力傳感器分辨率有限、不適合遙感、成本稍 高,高端一些的超成波傳感器不適合短距離傳感,電容式傳感器靈敏度高可針對被選擇物的選擇性不高,HALL傳感器存在精度問題、需要磁體和校準,光學傳感 器在惡劣環境下不可靠,這些傳感器都或多或少存在這樣和那樣的缺點,而TI此次推出的電感數字轉換器顛覆了現有傳感器的現狀,在分辨率、精度、靈敏度、靈 活性等方面均優于傳統的傳感器類型,能給設計師帶來更多的設計靈感。同時,Jon表示,由于LDC技術的優勢明顯,非常適合工廠流水線上的運動狀態的傳感 檢測,在工業機器人及智能工廠等工業領域將發揮良好作用。
LDC1000采集值的調用程序分析及應用
LDC1000采集值的調用程序
//將有序數組a[]和b[]合并到c[]中
void MemeryArray(int a[], int n, int b[], int m, int c[])
{
int i, j, k;
i = j = k = 0;
while (i 《 n && j 《 m)
{
if (a[i] 《 b[j])
c[k++] = a[i++];
else
c[k++] = b[j++];
}
while (i 《 n)
c[k++] = a[i++];
while (j 《 m)
c[k++] = b[j++];
}
ldc1000應用
LDC1000是通過調節振動器的幅度同時檢測LC的諧振損耗來實現阻抗和諧振頻率的測量。通過檢測注入LC諧振單元的能量計算出Rp(等效并聯電阻),轉換為數字量,其數值和Rp的值成反比。
LDC1000支持寬范圍的LC組合5 kHz到5 MHz諧振頻率,Rp的范圍支持798 Ω到3.93 MΩ,此范圍即為器件內部ADC的信號范圍,確定其分辨率。等效并聯電阻Rp與ADC碼值成反比,當金屬物體離線圈最近的時候渦流最大,損耗也最大。
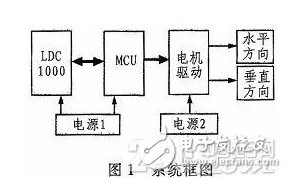
1 系統構成
早期金屬探測系統以8位51系列單片機作為控制核心,其硬件電路大體分為2部分,一部分為線圈振蕩電路,一般包括:多諧振蕩電路、放大電路和探測線圈;另一部分為控制電路,包括:霍爾元件、可編程放大電路、峰值檢波電路、模數轉換器、單片機、LED顯示電路、聲音報警電路及電源電路等。由于系統復雜,精確度經常達不到,而LDC1000評估板中集成了振蕩電路、檢測電路、模數轉換器、寄存器等,使用起來就方便很多,減少了很多不可控的調試環節,系統構成比較簡單,測試精度提高。如圖1所示。
2 總體設計方案
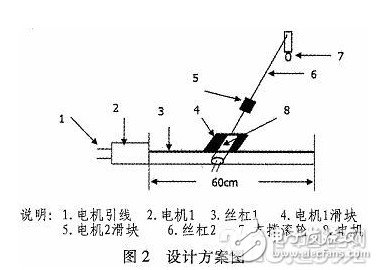
利用LDC1000可將測量量變換為距離的特點,可將其放置在一個能夠自主移動的設備上,就可以完成一定范圍內金屬物體的探測。自主設備需完成自動定位功能,即將LDC1 000所獲得的數據進行對比處理后輸出,控制自主設備的電機運轉,而最終停止在金屬物的附近或上方。本設計整體方案采用TI公司的MSP430微處理器作為控制器與之通過SPI口連接,通過讀取LDC1000的固定寄存器獲得相關數據經處理后驅動電機在50 cm*50 cm平面內移動尋跡,如圖2所示。
3 硬件構成
3.1 控制器
德州儀器的MSP430系列是一種超低功耗微控制器系列,采用16位的體系結構,16位的CPU集成寄存器和常數發生器,典型應用為傳感器系統。MSP430-14系列內置16位定時器,12位A/D轉換器,UART、SPI等。本設計中采用MSP430F149,通過SPI口與LDC1000連接。
3.2 與LDC1000的連接
LDC1000與MSP430f149的連接采用四線制SPI連接方式,通過SPI串行總線實現對LDC1000的控制,完成時序定義和數據讀取,在此通信過程中,LDC1000為從機(Slave)。MSP4 30f149其中引腳p3.0接LDC1000的CSB;P3.1接SDO;P3.2接SDI;P3.3接SCLK。
3.3 移動的實現
處理器輸出信號通過H橋驅動電路,完成電機1(X軸)和電機2(Y軸)的控制。根據電機負載,選擇不同的驅動晶體管,本設計中使用8 050和8 550對管實現,采用+12 V直流電驅動。測試中電機運轉正常,控制較為靈敏。通過對設計要求分析,在規定的時間內完成場內任意點的查詢,選擇減速直流電機(80 r/min)。
為保證整個探測區域,采用X—Y軸系統完成,電機1驅動滑塊完成X軸運動(如圖2所示),電機2固定在電機1的滑塊上,完成Y軸的運動,再將主控制器固定在滑塊2上,LDC-1000傳感器則盡量與玻璃平面靠近,采集相應數據。顯示部分采用LCD12864,可以將相應寄存器數據顯示以便觀察。當找到金屬物體時系統通過指示燈和蜂鳴器報警提示。
4 軟件實現
4.1 思路與流程
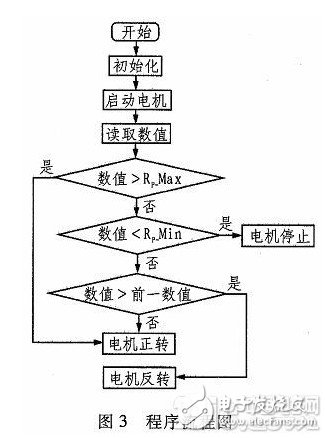
啟動后,先對LDC1000中特殊寄存器賦值,即設定上限和下限,并留出冗余,然后啟動滑塊移動傳感器,在所經過的地方對對Rp相應寄存器的數據讀出并進行數據的比較,去發現數值的變化情況,以此方式來逐次逼近金屬物,從而最終停止在金屬物附近或上方。程序執行過程如圖3所示。
4.2 程序實現
LDC1000中的寄存器地址已在其頭文件LDC1000_cmd.h中定義,編程時將其包含即可。在數據處理中,用戶關心的Rp和Frequency值,Rp可推算出金屬的距離,利用Rp值的變化完成金屬物的定位。Rp占用2個寄存器,可通過保持片選信號有效,進行連續讀寫,此時寄存器地址自動增加。
初始化程序:
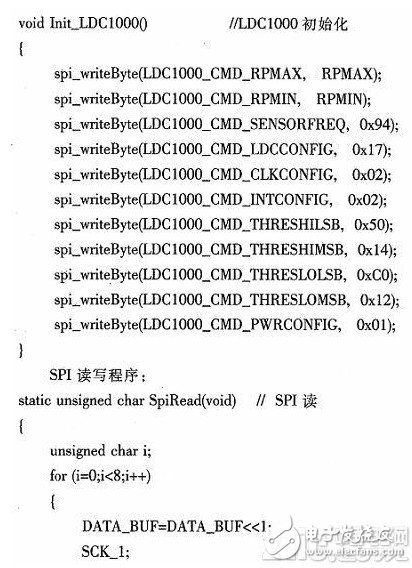
對函數進行調用時,函數參數值的選定應根據LDC1000的SPI通信協議。在主機與從機通訊時遵循以下步驟:片選信號置零;MSP430通過SDI線向LDC1000寫入訪問寄存器地
址,其中最高位0表示寫入,1表示讀出,剩余7位為寄存器的地址。
4.3 傳感器數據讀取
不同的測試對象和距離會產生不同的損耗,其Rp的范圍設置也不同,應用中需要配置寄存器Rp_Min和Rp_Max,如果超出范圍會被鉗位,但也不能設置為極限值,范圍過大,造成內部ADC精度無用。
4.4 實現結果
在測試過程中發現傳感器距金屬物體的距離較近時,顯示值才會有明顯的變化,而多數情況下都屬于超出范圍而被鉗位。而此需要更新程序的算法,還有就是更換自制電感線圈。
LDC1000對濾波電容的要求苛刻,穩定性好、壓電噪聲低,最優值在20 pF~100 nF之間,由LC的諧振時常數決定。電感可選用帶磁芯或空心電感,可借助示波器找到最佳電容值。
結語
關于LDC1000相關介紹就到這兒了,如有不足之處歡迎指正。