 電子發燒友App
電子發燒友App


目前動作捕捉系統有慣性式和光學式兩大主流技術路線,慣性式雖然后于光學式出現,但以其超低廉成本和簡便成熟的處理流程,以及完全實時的數據計算和回傳機制,成為了更加炙手可熱的技術。目前國際上最富代表性的產品是荷蘭Xsens公司研發的Xsens MVN慣性式動作捕捉系統以及美國Innalabs公司研發的3DSuit慣性式動作捕捉系統,國內則有諾亦騰、國承萬通等公司。
那么慣性式動作捕捉系統是如何正確運用在虛擬現實中的呢?本文將對慣性動捕的工作原理、優勢,及其存在的缺點進行解析,希望能與業內人士共同探討。
| 慣性式動作捕捉系統原理
動作捕捉系統的一般性結構主要分為三個部分:數據采集設備、數據傳輸設備、數據處理單元,慣性式動作捕捉系統即是將慣性傳感器應用到數據采集端,數據處理單元通過慣性導航原理對采集到的數據進行處理,從而完成運動目標的姿態角度測量。
慣性式動作捕捉系統具體是如何實現的?
在運動物體的重要節點佩戴集成加速度計,陀螺儀和磁力計等慣性傳感器設備,傳感器設備捕捉目標物體的運動數據,包括身體部位的姿態、方位等信息,再將這些數據通過數據傳輸設備傳輸到數據處理設備中,經過數據修正、處理后,最終建立起三維模型,并使得三維模型隨著運動物體真正、自然地運動起來。
經過處理后的動捕數據,可以應用在動畫制作,步態分析,生物力學,人機工程等領域。
加速度計,陀螺儀和磁力計又是如何工作的?
加速計是用來檢測傳感器受到的加速度的大小和方向的,它通過測量組件在某個軸向的受力情況來得到結果,表現形式為軸向的加速度大小和方向(XYZ),但用來測量設備相對于地面的擺放姿勢,則精確度不高,該缺陷可以通過陀螺儀得到補償。
陀螺儀的工作原理是通過測量三維坐標系內陀螺轉子的垂直軸與設備之間的夾角,并計算角速度,通過夾角和角速度來判別物體在三維空間的運動狀態。它的強項在于測量設備自身的旋轉運動,但不能確定設備的方位。而又剛好磁力計可以彌補這一缺陷,它的強項在于定位設備的方位,可以測量出當前設備與東南西北四個方向上的夾角。
在動作捕捉系統中,陀螺儀傳感器用于處理旋轉運動,加速計用來處理直線運動,磁力計用來處理方向。通俗易懂地講——
陀螺儀知道“我們是否轉了身”,加速計知道“我們運動多長距離”,而磁力計則知道“我們的運動方向”。
在動作捕捉系統中三種傳感器充分利用各自的特長,來跟蹤目標物體的運動。
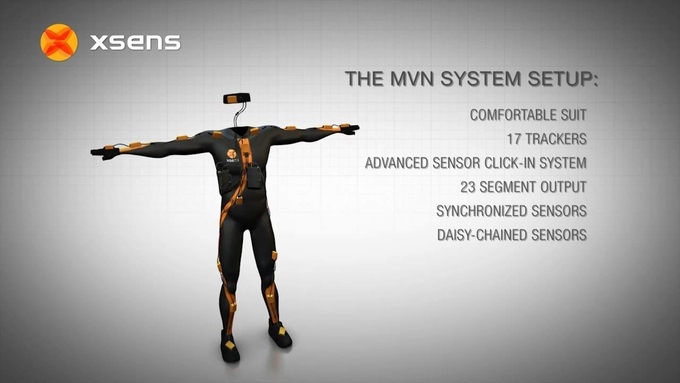
目前國際上最富代表性的產品是荷蘭Xsens公司研發的Xsens MVN慣性式動作捕捉系統以及美國Innalabs公司研發的3DSuit慣性式動作捕捉系統。MVN是一種全身萊卡套裝(也可以采用綁帶),使用方便,用戶可以在15分鐘內設置好整個系統。它采用微型慣性傳感器、生物力學模型、以及傳感器融合算法,帶有 17 個慣性跟蹤器,可以在6自由度跟蹤身體移動。Xsens MVN 具有快速的周轉時間且數據傳輸穩定、無誤,可節約高達 80% 的后期處理時間。
| 慣性式動作捕捉系統優勢在哪里?
首先是技術優勢
慣性式動作捕捉系統采集到的信號量少,便于實時完成姿態跟蹤任務,解算得到的姿態信息范圍大、靈敏度高、動態性能好;對捕捉環境適應性高,不受光照、背景等外界環境干擾,并且克服了光學動捕系統攝像機監測區域受限的缺點;克服了VR設備常有的遮擋問題,可以準確實時地還原如下蹲、擁抱、扭打等動作。此外,慣性式動作捕捉系統還可以實現多目標捕捉。
其次是使用便捷的優勢
使用方便,設備小巧輕便,便于佩戴。
還有成本優勢
相比于光學動作捕捉成本低廉,使得其不但可以應用于影視、游戲等行業,也有利于推動VR設備更快地走進大眾生活。
總的來說,慣性式動作捕捉技術有著對捕捉環境的高適應性,它的技術優勢、成本優勢和使用便捷的優勢,使得它在影視動畫、體驗式互動游戲、虛擬演播室、真人模擬演練、體育訓練、醫療康復等領域都有著優異的表現。
| 慣性式動作捕捉系統的劣勢,以及,如何解決?
上文中介紹了慣性式動作捕捉系統及其優勢,那它有什么劣勢,又該如何解決?
一般情況下慣性式動作捕捉系統采用MEMS三軸陀螺儀、三軸加速度計和三軸磁力計組成的慣性測量單元(IMU, Inertial Measurement Unit)來測量傳感器的運動參數。而由IMU所測得的傳感器運動參數有嚴重噪聲干擾,MEMS 器件又存在明顯的零偏和漂移,慣性式動作捕捉系統無法長時間地對人體姿態進行精確的跟蹤。只有解決了這一個問題,才能使慣性式動作捕捉系統在VR行業充分發揮作用。
目前,Xsens采用的解決方案如下:
首先對IMU所測得的傳感器運動數據做預處理,濾掉原始慣性數據中摻雜的噪聲干擾;
然后不斷地進行標定和校準,即不斷地對各慣性器件進行相應的補償以解決MEMS器件的零偏和漂移,提高其數據的精確度和可靠程度;
接下來在進行姿態解算,并利用姿態參考系統驗證姿態角度數據的精確度,最終實現整個慣性式動作捕捉。
此外,與之不同的是,國內的G-Wearables則采用IK+室內定位技術做主動作捕捉算法,使用慣性式動作捕捉做輔助算法。這套方案中利用室內定位技術對慣性式動作捕捉技術做實時校準,避免了不斷校準的麻煩。
那么,什么是IK算法?
首先介紹下IK算法及其在動作捕捉系統中的應用。
IK是Inverse Kinematics的縮寫,即反向運動學。
在人體分層結構中,關節和骨骼實際構成了運動鏈,比如肩關節、肘關節、腕關節及其子骨骼就是一條運動鏈,是整個人體運動鏈上的一條分支,身體即是利用運動鏈對運動進行控制。運動分為正向運動和反向運動。已知鏈上各個關節旋轉角,求各關節的位置信息和末端效應器(end effector)的位置信息,這是正向運動學的問題;而己知末端效應器的位置信息,反求其祖先關節的旋轉角和位置,這是就是反向運動學。
反向運動學根據決定運動的幾個主關節最終角度確定整個骨架的運動,通常用于環節物體,由不同運動約束的關節連接成環節構成的分級結構骨架。分級結構骨架由許多采用分級方式組的環節鏈構成,包括分級結構關節或鏈,運動約束和效應器,由效應器帶動所有部分同時運動。但必須遵循特定的等級關系,以便在變換時阻止各個部件向不同方向散開。如:投球動作,只規定出球的起始位置、終了位置和路徑,手臂等即跟隨關節的轉動可按反向運動學自動算出。反向運動學方法在一定程度上減輕了正向運動學方法的繁瑣工作,是生成逼真關節運動的最好方法之一。
IK算法如何在動作捕捉系統中應用?
如上文所說,如果己知末端效應器的位置信息,反求其祖先關節(也稱父關節)的旋轉角和位置,這是就是反向運動學。也就是我們通過室內定位技術,獲取末端效應器的位置信息,然后利用IK算法推算出祖先關節的旋轉角和位置,從而知道運動者的運動信息,再利用運動信息實現實時動作跟蹤顯示。
這里所用的室內定位技術是激光定位技術,通過墻上的激光發射器掃描佩戴者佩戴的機身上的位置追蹤傳感器(即IK算法中的末端效應器),從而獲得位置和方向信息。具體來說,這種室內定位技術是靠激光和光敏傳感器來確定運動物體的位置。若干個激光發射器會被安置在對角,形成一個矩形區域,這個區域可以根據實際空間大小進行調整。每個激光發射器內設計有兩個掃描模塊,分別在水平和垂直方向輪流對定位空間發射橫豎激光掃描定位空間。運動者身上有光敏傳感器,通過光敏傳感器接收到激光的時間計算出光敏傳感器的準確位置。
通過激光室內定位技術獲取傳感器的精確位置后,即可利用IK算法反向推算出祖先關節的旋轉角和位置,從而知道運動者的運動信息。但是由于激光定位過程中可能存在遮擋問題,比如下蹲、擁抱、扭打等動作。于是應用慣性傳感器做補充跟蹤,即當出現遮擋情況時, 室內定位技術+IK算法相結合的動作捕捉技術無法完全準確地實現,這個時候利用慣性式動作捕捉技術可做補充。反過來可以利用室內定位技術對慣性式動作捕捉技術做實時校準,不需要另行校準,從而解決遮擋問題的同時,也避免了慣性式動作捕捉無法長時間精確工作的弊端。
以上詳細解析了慣性式動作捕捉系統的原理,優劣勢等方面的內容,動作捕捉系統作為VR界的隱形鑰匙,越來越多地被人們所關注。相信隨著VR行業的迅猛發展,會有更多的更好的解決方案問世,筆者跟大家一樣,期待有一天精準的VR動作捕捉技術可以走入我們的日常生活。











 工商網監
工商網監
評論