 電子發(fā)燒友App
電子發(fā)燒友App


本文將介紹一種支持GPRS的GPS系統(tǒng),并且對其中所涉及到的硬件、軟件設計方案給出了詳細的描述。通過該模型,可以比較好的實現(xiàn)GPS定位信息數(shù)據(jù)遠程傳輸。
1 系統(tǒng)模型
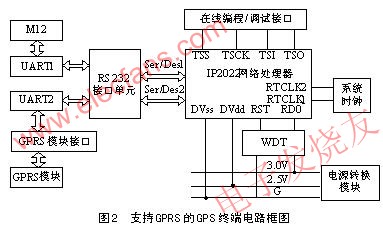
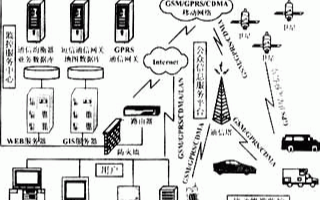
圖1是本方案的系統(tǒng)模型。從GPS終端采集來的定位數(shù)據(jù),經(jīng)過GPRS網(wǎng)絡透明地傳輸?shù)竭h程GPS服務器,遠程GPS服務器通過對GPS數(shù)據(jù)的解碼便可以獲得定位信息。其詳細的流程可以概括如下:

① 首先,GPS終端發(fā)出包括有APN號碼的GPRS登錄請求,登陸到 GPRS網(wǎng)絡;
② 位于移動的SGSN根據(jù)登陸請求中的APN,找到登記的Radius服務器,并將用戶認證信息送至Radius服務器;
③ Radius認證服務器根據(jù)所傳遞過來的認證信息,確認是否是合法用戶發(fā)來的請求,如果是合法用戶,則根據(jù)配置為其分配一個IP地址;
④ Radius服務器向GGSN發(fā)送攜帶用戶地址的確認信息;
⑤ GPS終端得到了IP地址,就可以根據(jù)配置(作為服務器端或者客戶端)與GPS服務器建立起TCP連接;
⑥ 連接建立后,GPS終端采集到的定位信息數(shù)據(jù)就會通過建立的TCP數(shù)據(jù)連接透明地傳輸?shù)紾PS服務器;
⑦ 當GPS服務器有控制命令或其它數(shù)據(jù)要向下發(fā)送時,可以通過TCP連接傳送到GPS終端;
⑧ GPS終端根據(jù)配置可以作為服務器端或者客戶端建立與用戶管理服務器的數(shù)據(jù)連接,用戶管理服務器通過該連接對GPS終端進行監(jiān)控、管理以及遠程更新系統(tǒng)內核程序。
2 GPS終端的設計
2.1 硬件設計
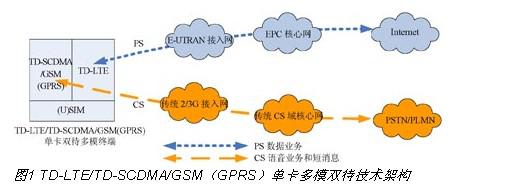
GPS終端的電路框圖如圖2所示,GPS終端的核心是一塊負責TCP/IP數(shù)據(jù)傳輸?shù)木W(wǎng)絡處理器:IP2022芯片。IP2022是UbiCom公司的高性能網(wǎng)絡處理器,具有100MIPS的處理能力,并專門針對網(wǎng)絡應用進行了優(yōu)化。在IP2022芯片中集成了兩個全雙工的串化器/解串器(Ser/Des)硬件單元,能直接與各種常用接口相連。這種功能使其能夠實現(xiàn)片內10Base-T以太網(wǎng)、USB以及其它各種快速串行協(xié)議。由于擁有Ser/Des硬件單元,IP2022也便于從一種協(xié)議轉換到另一種協(xié)議,因此比較適合于實現(xiàn)GPS終端。
IP2022的軟件模塊包括USB、UART、I2C、SPI以及一個完整的TCP/IP堆棧,它能夠在執(zhí)行應用程序的同時,提供高速計算、靈活的I/O控制和高效的數(shù)據(jù)處理功能。
在本系統(tǒng)中,主要應用了IP2022的兩個Ser/Des硬件單元以及其TCP/IP協(xié)議棧。兩個全雙工的Ser/Des硬件單元經(jīng)過串口轉換電路(核心為MAX232)轉換成為兩個標準的RS232接口,通過這兩個RS232接口便于與GPS模塊以及GPRS模塊的通信。
系統(tǒng)時鐘模塊為硬件系統(tǒng)提供工作所需要的時鐘脈沖,這部分比較簡單,但是需要注意兩個方面。一是晶振的選擇,雖然IP2022也支持無源晶振,但是在實際應用中發(fā)現(xiàn)還是有源晶振與IP2022的兼容性好一些,所以在可能的情況下還是選擇有源晶振比較好。二是晶振頻率的選擇,由于串口通信的波特率是對晶振頻率分頻而成,如果晶振頻率選擇不當,在串口通信時會出現(xiàn)亂碼。經(jīng)試驗和計算所得,4.9152MHz的晶振可以很好的支持多種常用波特率。
程序的寫入和調試是通過在線編程接口實現(xiàn)的,IP2022支持在線編程和調試,該部分主要把IP2022的編程接口引出,加以適當?shù)母綦x保護,并通過SPI和并口的轉換電路與調試機的并口相連接。
在本系統(tǒng)中,內部電壓有兩種,一種是接口設備所需要的3V,另一種是IP2022所需要的2.5V。這兩種電壓是經(jīng)過電源轉換模塊轉換而成。由于GPRS模塊在數(shù)據(jù)發(fā)送的時候瞬間電流很大,電源轉換模塊也提供了足夠的功率和必要的保護。
GPRS數(shù)據(jù)模塊實現(xiàn)GPRS傳輸?shù)墓δ埽喈斢谄胀ǖ腗odem,市面上比較流行的有Motorola的G18在與GPRS數(shù)據(jù)傳輸模塊通信時,沒有采用直接操縱GPRS數(shù)據(jù)傳輸模塊接口,而是通過RS232連接,極大的降低了對GPRS數(shù)據(jù)傳輸模塊的依賴性,用戶可以根據(jù)需要,來選定GPRS數(shù)據(jù)模塊。
GPS接收器采用了Motorola公司的M12,M12通過串口與RS232接口單元相連接。
2.2 軟件設計
在GPS終端軟件設計方面,為了便于以后擴展,采用了嚴格的分層結構,具體的軟件結構如圖3所示。

2.2.1 串口驅動模塊
利用串口驅動模塊來完成對串口的操作,向上層提供對串口參數(shù)配置的功能,并在有數(shù)據(jù)收到或者發(fā)送完畢的時候通過IndicateReceive、IndicateSend回調函數(shù)向上層報告,上層軟件可以調用Send、Receive來進行收發(fā)。
2.2.2 網(wǎng)絡驅動模塊
在硬件中的GPRS模塊只是提供了一種硬件信道,與服務器之間的數(shù)據(jù)連接必須通過軟件完成。在通信時,軟件首先通過GPRS模塊特有的命令(一般為AT+CGMD)與GPRS網(wǎng)絡連接,再通過PPP協(xié)議建立數(shù)據(jù)鏈路,最后就可以通過TCP/IP協(xié)議與遠程的服務器通信了。這一部分與網(wǎng)絡操作的功能都放在網(wǎng)絡驅動模塊中加以實現(xiàn)。與串口驅動模塊類似,網(wǎng)絡驅動模塊也提供了數(shù)據(jù)傳輸?shù)囊恍┓铡?/P>
2.2.3 橋接模塊
由于串口是一個慢速連接,主機與串口的通信有時甚至是單字節(jié)操作,如果對于每一個這樣小的通信都單獨通過一個TCP包發(fā)送的話,譬如說一個字節(jié)的數(shù)據(jù),這將產(chǎn)生一些41字節(jié)的分組:20字節(jié)的IP頭,20字節(jié)的TCP頭以及1字節(jié)的數(shù)據(jù)。如果在高速網(wǎng)絡上(例如局域網(wǎng)),這一些小分組通常不會引起麻煩,但是如果在GPRS這樣的網(wǎng)絡上(平均往返時間高達數(shù)百ms),則會增加擁塞出現(xiàn)的可能性,并將會使網(wǎng)絡的效率極其低。在通常的TCP/IP實現(xiàn)中,一般采用Nagle算法來解決這個問題。但是在Ubicom的協(xié)議棧中沒有這個功能,因此,必須自己實現(xiàn)這個算法。考慮到對下層硬件結構的無依賴性,筆者將其放在橋接模塊中實現(xiàn),而不是放在網(wǎng)絡驅動模塊中實現(xiàn)。在算法實現(xiàn)中,當有串口數(shù)據(jù)到來時,對于小分組,并不立即就將其發(fā)出,而是等待一段時間(200s左右),如果在這段時間中再沒有小數(shù)據(jù)到來,那么將其發(fā)出,否則將數(shù)據(jù)進行累計后發(fā)出。當然有些系統(tǒng)要求立即發(fā)出,那么也可以通過配置取消這種功能。經(jīng)這樣實現(xiàn)后,效率有了很大的提高,具體的效果可以參考后面的實驗數(shù)據(jù)。
2.2.4 輔助模塊
在上面一些模塊的介紹中可以看到,其中有一些關鍵性的數(shù)據(jù)必須支持用戶自己配置,例如串口通信速度、停止位、網(wǎng)絡驅動模塊中GPRS所要連接的APN、賬戶、密碼、工作模式(是作為服務器運行還是客戶端運行)、靜態(tài)IP還是動態(tài)IP等。這一部分數(shù)據(jù)由配置模塊存儲在外部存儲器里,每次系統(tǒng)啟動的時候再由配置模塊載入。在輔助模塊中還包括一個重要的子模塊:遠程管理模塊,它實現(xiàn)對GPS終端的遠程管理,包括遠程跟蹤和遠程更新程序。系統(tǒng)的運行情況通過統(tǒng)計模塊進行統(tǒng)計,然后可以通過遠程管理模塊進行上報。
2.2.5 系統(tǒng)監(jiān)控模塊
對于放在遠程的一個無人看管的系統(tǒng)來說,最重要的一點就是容錯能力,必須能夠在任何錯誤的情況下自動恢復到正常運行狀態(tài),這一部分就是通過系統(tǒng)監(jiān)控模塊實現(xiàn)的。在GPS終端中,經(jīng)常出現(xiàn)的異常包括有TCP連接中斷和網(wǎng)絡連接中斷,這兩種錯誤是有區(qū)別的,解決的方法也不一樣。TCP連接中斷指的是TCP連接進入異常狀態(tài),不能在該連接上進行數(shù)據(jù)的收發(fā)工作。這種錯誤產(chǎn)生的原因是GPRS網(wǎng)絡有時會進入偽死狀態(tài),而導致雖然還在網(wǎng)絡上,但是數(shù)據(jù)的收發(fā)工作無法進行。通過在每個連接上設置一個收發(fā)超時計時器可以發(fā)現(xiàn)這種錯誤。當有數(shù)據(jù)傳輸時即復位計數(shù)器,如果計數(shù)器超時,則表明TCP連接中斷,此時應該根據(jù)工作模式而采取不同的處理。如果是工作在客戶端模式,需要再次與服務器連接,如果工作在服務器模式,則只需要簡單的斷開連接即可。
對于網(wǎng)絡連接中斷的情況探測起來比較困難,一般是通過監(jiān)測長時間沒有數(shù)據(jù)通信來判斷。如果一旦發(fā)生此類錯誤,則需要重新進行網(wǎng)絡的連接工作。
由于軟件難免會有一些未曾發(fā)覺的錯誤,在發(fā)生此類錯誤的時候則由硬件看門電路復位系統(tǒng),并且在下次軟件啟動時將此類錯誤發(fā)生過的信息遠程傳送到服務器。
3 服務器端軟件的設計
GPS服務器程序可以采用兩種方式與遠程的GPS終端建立連接,一種是采用TCP方式,另外一種是采用串口通信方式。在采用串口通信方式時,需要編制一個虛擬串口驅動程序,將一個TCP連接模擬成為一個串口,這樣服務器就可以像操縱M12一樣對遠程的GPS終端進行操作了。
GPS服務器和遠程GPS終端之間的通信協(xié)議采用了原始的M12通信命令,核心模塊在GPS服務器和M12之間進行了數(shù)據(jù)透明轉發(fā)的作用。M12支持有兩種通信數(shù)據(jù)格式: 一是Motorola二進制數(shù)據(jù)指令格式,在采用Motorola二進制格式時,通信速率可以保證在9600bps;另一種是NMEA-0183格式,其通信速率只有4800bps,同時在初始化GPS時還需要加入由Motorola二進制轉化為NMEA-0183的指令。因此建議使用Motorola二進制數(shù)據(jù)格式。
在此設計當中,關鍵的環(huán)節(jié)在于兩個方面,一是連接的建立,二是M12的初始化。GPS終端返回的定位信息數(shù)據(jù)格式如下:
@@Eamdyyhmsffffaaaaoooohhhhmmmmvvhhddtntimsd imsdimsdimsdimsdimsdimsdimsdsC。
時間信息:m月,d日,yy年, h小時,m分,s秒。
位置信息:aaaa緯度,oooo經(jīng)度,hhhh橢球高度。
在所有信息終止的前的一個字節(jié)為校驗和,是所有信息字節(jié)的“異或”。
收到數(shù)據(jù)后,只要對數(shù)據(jù)進行解碼,就可以獲得定位信息以及時間。
4 服務器端的考慮
在GPRS聯(lián)網(wǎng)中,必須注意的一個概念是APN。在登陸GPRS時,采用的APN不同,GPS終端和服務器之間所能采用的方式也有所不同。
如果采用公網(wǎng)APN(cmnet),那么服務器端只要有一固定公網(wǎng)IP即可,此時Radius服務器由移動公司提供,GPS終端上網(wǎng)后的IP也是由移動公司的Radius服務器隨機分配的。GPS終端與服務器必須經(jīng)過NAT(Network Address Translation,網(wǎng)絡地址變換)后才能通信,而從我們數(shù)據(jù)服務器看過去的GPS終端的IP地址也不是它的真正地址。因此,GPS終端與數(shù)據(jù)服務器之間的連接只能由GPS終端發(fā)起,換言之,即GPS終端只能工作在客戶狀態(tài)。在采用公網(wǎng)時雖然可以節(jié)省開支,但需要考慮安全性問題,因為這時候是與Internet直接連通的,并且客戶之間也不可以直接訪問。
與公網(wǎng)APN相對應的一種方式是采用私有APN,即用戶向移動申請一個APN號。在采用這種方式時,所有登陸這個APN的用戶可以通過IP地址互相訪問,因此在數(shù)據(jù)量比較小的時候甚至可以采用一個也使用GPRS終端的用戶做服務器。Radius服務器的設置比較靈活,可以采用移動公司的Radius服務器,也可以自建一套Radius服務器。自建Radius服務器的最大好處就是GGSN會將驗證信息發(fā)送給我們,我們可以根據(jù)號碼或者其它信息為其分配一個靜態(tài)IP地址,非常適合GPS終端作為服務器運行。
Radius服務器可以采用一些商用的服務器,但從實踐中看,自己編寫一套Radius服務器可能更加適合GPRS。
5 結 論
對系統(tǒng)進行了全面的測試,在傳輸效率上面,本系統(tǒng)表現(xiàn)的非常良好,連接上網(wǎng)絡的時間僅需要3s左右。在使用Class 12的GPRS模塊時,傳輸速率可以達到38kbps的上傳速度以及44kbps的下傳速度。對于一般的數(shù)據(jù)采集設備能夠保證數(shù)據(jù)的及時傳輸,在發(fā)生GPRS網(wǎng)絡短暫失效時,可以在網(wǎng)絡恢復后的10s內重新在線,基本上保證了無間斷傳輸,因此可以滿足GPS用戶的需要。











 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論