MCS-51單片機組成CAN通信系統(tǒng)需要擴展CAN控制器,本系統(tǒng)采用的CAN控制器是SJA1000。SJA1000是PHILIPS公司生產(chǎn)的既支持CAN 2.0B,又支持CAN 2.0A的CAN
2019-01-09 08:23:00 5734
5734 
CAN總線由CAN控制器、CAN收發(fā)器、數(shù)據(jù)傳輸線、數(shù)據(jù)傳輸終端等組成。CB311的ECU(發(fā)動機控制單元)、TCU(變速器控制單元)、FEPS(無鑰匙進入和無鑰匙啟動系統(tǒng))、組合儀表四個電控單元
2022-10-08 10:57:306109 CAN控制器與其它微處理器的接口成為設(shè)計CAN總線系統(tǒng)的首要工作。當(dāng)前已有一些微處理器將CAN控制器嵌入到系統(tǒng)之中,成為在片的微處理器,例如P8XC592(其內(nèi)核即為80C51的CPU),MCS96
2018-12-03 15:22:37
使用的CAN2517FD有所區(qū)別,僅供參考),主要體現(xiàn)在數(shù)據(jù)鏈路層這一部分。應(yīng)用程序,具體表現(xiàn)在控制器以不同的通信方式、MCP2517FD提供的相應(yīng)指令集和指令集格式對CAN2517FD的寄存器進行讀寫操作,進而實現(xiàn)相應(yīng)的功能。具體可參考:CAN總線數(shù)據(jù)鏈路層分析(四) 二、CAN
2021-08-19 06:47:56
10km,無損位仲裁機制,多主結(jié)構(gòu)。近些年來,CAN控制器價格越來越低。 ? 低成本:ECUs通過單個CAN接口進行通信,布線成本低。 ? 高集成:CAN總線系統(tǒng)允許在所有ECUs上進行集中錯誤診斷和配置。 ? ...
2022-01-12 06:08:19
CAN總線通訊是被眾多工程師深刻認(rèn)識并應(yīng)用廣泛的一種標(biāo)準(zhǔn)化的串行通信協(xié)議,全稱為Controller Area Network,翻譯為控制器局域網(wǎng)絡(luò)。最初的時間里,CAN是應(yīng)用在汽車產(chǎn)業(yè)中,出于
2011-09-24 11:57:56
實現(xiàn)的 CAN 通信控制器參照 SJA1000 CAN 通信控制器的結(jié)構(gòu),程序基本框架如圖 9-9 所示。 CAN 通信控制器的具體實現(xiàn)各模塊的組織結(jié)構(gòu)如圖 9-10 所示。
2018-12-19 17:26:24
的實現(xiàn)特定功能。 隔離模塊主要用在各種串行總線或現(xiàn)場總線的收發(fā)端,通過隔離模塊本身的隔離性能,斷開地環(huán)路,提高共模抑制性能和抗干擾能力,應(yīng)用如圖1所示。 圖 1接口隔離模塊的應(yīng)用 除使用隔離模塊自己本身
2018-12-03 11:25:46
總線。由于CAN總線的數(shù)據(jù)通信具有良好的可靠性、實時性和靈活性,CAN已經(jīng)在汽車工業(yè)、航空工業(yè)、工業(yè)控制等領(lǐng)域中得到了廣泛應(yīng)用。文中以S5PV210微處理器為硬件平臺,通過擴展其SPI接口,實現(xiàn)了CAN控制器MCP 2515在Android操作系統(tǒng)下的驅(qū)動程序開發(fā)。
2020-08-27 07:10:55
SJA1000 是 Philips 公司于 1997 年推出的一種獨立 CAN 總線控制器。它實現(xiàn)了 CAN 總線物理層和數(shù)據(jù)鏈路層的所有功能。SJA 1000 通信控制器的功能框圖如圖 9-8
2018-12-18 14:55:11
目錄:一、CAN通信原理1.CAN通信簡介2.CAN通信優(yōu)點3.CAN總線物理層4.CAN報文種類5.數(shù)據(jù)幀格式6.仲裁過程7.位同步二、STM32的CAN控制器1.功能特點2.STM32CAN架構(gòu)
2021-08-19 06:34:16
為了更好的將USB的通用性和CAN的專業(yè)性結(jié)合起來,通過計算機的USB接口接入CAN專業(yè)網(wǎng)絡(luò),實現(xiàn)系統(tǒng)控制的便利性和應(yīng)用的高效性,本文講述了一種基于ARM7處理器實現(xiàn)USB接口與CAN總線的實例,通過其可以在PC實現(xiàn)對CAN總線上設(shè)備的監(jiān)控。
2020-03-25 07:18:31
完全無需了解復(fù)雜的USB協(xié)議的情況下,即可方便的開發(fā)出CAN系統(tǒng)應(yīng)用軟件產(chǎn)品,大大簡化了USB開發(fā)的難度。USB轉(zhuǎn)CAN串口通信模塊廣泛應(yīng)用于通過PC或筆記本的USB接口實現(xiàn)對CAN總線網(wǎng)絡(luò)的發(fā)送和接收
2011-05-27 09:13:53
。項目描述:控制器實現(xiàn)CAN、RS484、RS422等多種總線接口控制,初步方案通過PCA82C250實現(xiàn)CAN總線接口,并通過光耦進行電源隔離。
2016-01-29 11:52:12
BSJA1000 電路是一款獨立CAN 總線控制器,主要應(yīng)用于汽車和一般工業(yè)環(huán)境領(lǐng)域。該產(chǎn)品與CAN 2.0B 通信協(xié)議完全兼容,具有很多先進特性,特別適用于系統(tǒng)級優(yōu)化、診斷和維護等重要應(yīng)用領(lǐng)域
2012-12-21 15:57:48
聯(lián)絡(luò)與應(yīng)答,保證系統(tǒng)存儲空間訪問的安全性。2.1 MCU主控制電路 MCUl(AT89C52片1)連接的外圍設(shè)備有雙口RAM和CAN總線控制器。為了防止地址沖突,采用74LS138譯碼器進行地址譯碼
2012-01-12 10:11:26
基于CAN 總線通訊的變槳距風(fēng)力發(fā)電控制系統(tǒng)[hide][/hide]
2009-09-11 01:08:00
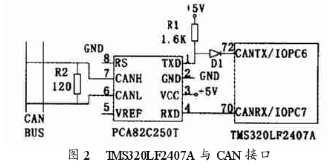
廣泛應(yīng)用于數(shù)字化控制與通信領(lǐng)域。CAN總線控制器與TMS320LF2407微控制器連接,可以實現(xiàn)CAN總線的通信。TMS320LF2407微控制器內(nèi)嵌的異步串行口(SCI)支持CPU與其它使用標(biāo)準(zhǔn)格式
2018-12-10 10:19:26
轉(zhuǎn)速高于設(shè)定值后離合器再自動結(jié)合。(4)CAN 通信:ACS 控制器通過CAN 總線接口與發(fā)動機控制器實現(xiàn)數(shù)據(jù)通信, 為離合器與發(fā)動機的協(xié)調(diào)控制提供數(shù)據(jù)支持。 詳情請點擊:http://design.電子發(fā)燒友.com/design_2012120417071943.htm
2012-12-05 09:50:00
電路是整個系統(tǒng)實現(xiàn)通信的關(guān)鍵部分,系統(tǒng)中各個節(jié)點和節(jié)點控制器是通過CAN通信電路接入CAN總線網(wǎng)絡(luò)上的,實現(xiàn)信號數(shù)據(jù)的傳輸。CAN通信電路采用STC89C52處理器、PHILIPS公司的總線控制器
2018-11-13 10:38:08
基于DSP的高低速CAN總線汽車控制系統(tǒng)設(shè)計摘 要 采用TI公司內(nèi)嵌CAN 2.0B模塊的數(shù)字信號處理器TMS320LF2407A作為汽車計算機控制系統(tǒng)中的主控制器并兼作網(wǎng)關(guān),構(gòu)建高低速CAN總線
2009-10-06 14:57:04
基于FPGA的CAN總線通信系統(tǒng)為了克服單片機固有的缺陷, 滿足航天控制的需求, 文章提出了如何利用FPGA采用查詢的方式控制CAN控制器SJA1000,從而實現(xiàn)CAN總線數(shù)據(jù)通信的方法; 介紹了
2012-08-11 11:55:19
不同型號的CAN總線通信控制器,實現(xiàn)底層協(xié)議部分的電路結(jié)構(gòu)和功能基本相同,而與微處理器接口部分的結(jié)構(gòu)和方式存有不同。在本配電控制模塊的CAN總線通信接口中采用CTM1050T總線接口模塊。CTM1050T
2019-05-30 05:00:05
沒有調(diào)試。項目概述:利用STM32作為主控制芯片,設(shè)計出利用CAN總線傳輸數(shù)據(jù)的通信節(jié)點,在查閱STM32和CAN總線等相關(guān)文獻和資料基礎(chǔ)上,確定節(jié)點的總體設(shè)計方案,主要包括電源模塊、微控制器模塊、氣體傳感器模塊、LCD模塊、報警模塊等組成【資源下載】下載地址如下(851):https://docs
2021-07-19 07:18:56
在項目的特殊環(huán)境要求下, CAN總線通信要求使用FPGA作為系統(tǒng)中的主控制器, 較之傳統(tǒng)設(shè)計使用的單片機, FPGA能夠在速度和體積上有更好的適應(yīng)性。
2019-09-26 06:57:07
采用具有24位∑-△型A/D轉(zhuǎn)換器的系統(tǒng)級單片機MSC1210結(jié)合低成本的供電解決方案與CAN控制器SJA1000以及CAN總線收發(fā)器82C250,設(shè)計一種具有CAN總線接口的24位稱重數(shù)據(jù)采集系統(tǒng),可應(yīng)用于組合稱重設(shè)備、選別設(shè)備。
2021-04-14 06:15:25
控制局域網(wǎng)(CAN)屬于現(xiàn)場總線的范疇,它是一種有效支持分布式控制或?qū)崟r控制的串行通信網(wǎng)絡(luò)。與一般的通信總線相比,CAN總線的數(shù)據(jù)通信可靠性、實時性和靈活性好,應(yīng)用領(lǐng)域非常廣泛,通常基于ARM或51單片機,實現(xiàn)與CAN控制器的通信聯(lián)絡(luò)。
2019-10-18 07:30:54
較PC/104總線上的地址信息和設(shè)定的I/O地址是否相同,如相同則對SJA1000產(chǎn)生片選信號。控制總線的信號切換也是由可編程邏輯芯片GAL16V8來實現(xiàn)的。5)通信模塊CAN總線通信模塊由CAN控制器
2019-06-11 05:00:04
和物理總線之間的接口,該器件對總線提供差動發(fā)送能力并對CAN控制器提供差動接收能力,有很強的抗電磁干擾(EMI)的能力,至少可掛110個節(jié)點。 2.4 嵌入式系統(tǒng)的CAN接口電路 圖2是嵌入式微處理器
2020-07-08 15:34:41
CAN總線及控制器工作原理是什么?流接口驅(qū)動程序工作機制是怎樣的?怎樣去設(shè)計CAN總線控制器sJAl000驅(qū)動程序?
2021-04-27 06:41:09
控制器局域網(wǎng)(CAN)是現(xiàn)代汽車網(wǎng)絡(luò)通信與控制系統(tǒng)中的重要組成部分,《汽車CAN總線系統(tǒng)原理、設(shè)計與應(yīng)用》全面、系統(tǒng)地介紹了汽車CAN總線的基本原理、應(yīng)用層協(xié)議制定、系統(tǒng)軟件和硬件設(shè)計,并且通過實例
2018-04-09 22:27:02
的可能性。Can-Bus技術(shù)在汽車的應(yīng)用,可以減少了汽車車體內(nèi)線束和控制器的接口數(shù)量,避免了過多線束存在的互相干涉、磨損等隱患,降低了汽車電氣系統(tǒng)的故障發(fā)生率。各種傳感器的信息可以實現(xiàn)共享。另外,在
2015-06-24 13:56:39
設(shè)備的互連和交通運載工具電氣系統(tǒng)中。控制器局域網(wǎng)(CAN)是一種有效支持分布式控制或?qū)崟r控制的現(xiàn)場總線,具有高性能和高可靠性的特點;隨著現(xiàn)代汽車技術(shù)的發(fā)展,CAN技術(shù)在汽車電子領(lǐng)域應(yīng)用日益廣泛
2015-08-18 14:10:28
控制與通信領(lǐng)域。CAN總線控制器與TMS320LF2407微控制器連接,可以實現(xiàn)CAN總線的通信。TMS320LF2407微控制器內(nèi)嵌的異步串行口(SCI)支持CPU與其它使用標(biāo)準(zhǔn)格式的異步外設(shè)之間
2019-06-14 05:00:10
CAN總線的可靠性高,使應(yīng)用層通信協(xié)議得以大大簡化.目前市場上有多種不同型號的CAN控制器,它們實現(xiàn)CAN協(xié)議部分電路的結(jié)構(gòu)和功能大多相同,只是與單片機接口部分的結(jié)構(gòu)和方式有一些差異.為了提高硬件電路
2019-05-06 09:18:17
通訊。2 硬件設(shè)計can通信的核心芯片是can控制器,can的通信協(xié)議主要是由它完成的,它可以實現(xiàn)物理層和數(shù)據(jù)鏈路層的所有功能。can控制器有許多芯片結(jié)構(gòu),獨立芯片的例如philips的sja1000
2019-06-11 05:00:07
宏觀意義上來說,工程機械控制器主要由電源模塊、通信模塊、輸出驅(qū)動模塊、輸入模塊和MCU模塊構(gòu)成。CAN通信是一種多主總線,每個節(jié)點機均可成為主機,且節(jié)點機之間也可進行通信。控制器采用
2022-08-30 16:20:15
基于CAN 總線通訊的變槳距風(fēng)力發(fā)電控制系統(tǒng):變槳距控制器用于實現(xiàn)功率調(diào)節(jié)和槳角控制,介紹了液壓驅(qū)動和電控驅(qū)動兩種槳距控制系統(tǒng)的不同,然后討論了CAN 總線在風(fēng)力發(fā)電機組
2009-05-31 12:52:48 32
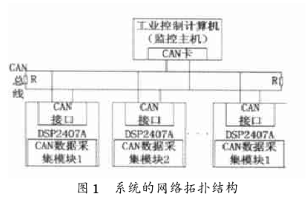
32 本文介紹了一種基于CAN總線的網(wǎng)絡(luò)監(jiān)控系統(tǒng)方案。該方案使用CAN卡和DSP中的CAN模塊作為上下位機通信接口,研究了CAN通信協(xié)議模型,VC++與CAN卡的通信接口,DSP中CAN模塊通信的數(shù)據(jù)處
2009-06-01 15:32:2227 本文針對賓館、酒店的客房控制和管理系統(tǒng),介紹了基于CAN 總線的客房通信控制器的硬件電路結(jié)構(gòu)、原理及軟件結(jié)構(gòu)和主程序流程。關(guān)鍵詞:CAN 總線;現(xiàn)場總線;通信技術(shù);樓
2009-06-13 12:06:0313 介紹了CAN總線的介質(zhì)訪問方法與技術(shù)特點,分析了CAN總線在數(shù)字繼電保護系統(tǒng)中的應(yīng)用可行性和所傳送數(shù)據(jù)流的性質(zhì),給出了DSP的McBSP(多通道緩沖串行接口)與CAN控制器接口的硬件配
2009-06-25 14:45:0313 鑒于目前基于RS-485通信的監(jiān)控系統(tǒng)的一些問題,本文闡述了用微控制器P87C591和現(xiàn)場總線技術(shù)實現(xiàn)基于CAN總線的監(jiān)控系統(tǒng),還詳細(xì)說明了RS-232與CAN總線轉(zhuǎn)換器和基于CAN總線的云臺控制
2009-07-09 10:06:4736 介紹了一種基于CAN總線的客車電控自動換檔系統(tǒng),說明了該控制器的工作原理并詳細(xì)闡述了其硬件組成及其所實現(xiàn)的功能。此系統(tǒng)采用了當(dāng)前先進的電子技術(shù)和智能控制算法,經(jīng)實
2009-07-10 17:07:2623 介紹了CAN總線的介質(zhì)訪問方法與技術(shù)特點,分析了CAN總線在數(shù)字繼電保護系統(tǒng)中的應(yīng)用可行性和所傳送數(shù)據(jù)流的性質(zhì),給出了DSP的McBSP(多通道緩沖串行接口)與CAN控制器接口的硬件配
2009-07-30 15:24:5313 本設(shè)計為光電穩(wěn)定跟蹤平臺開發(fā)CAN 驅(qū)動,以實現(xiàn)CAN 總線上設(shè)備間的通信。分析了linux 下標(biāo)準(zhǔn)設(shè)備驅(qū)動機制和CAN 總線通信模型,給出了光電穩(wěn)定跟蹤平臺中CAN 總線通信的硬件設(shè)計
2009-08-04 08:33:4830 本文闡述了基于CAN 總線的發(fā)動機測控系統(tǒng)接口通信卡的開發(fā),研制了CAN 轉(zhuǎn)RS-232 接口卡,給出了詳細(xì)的數(shù)據(jù)通訊接口轉(zhuǎn)化卡電路圖。實現(xiàn)PC 機與電渦流測功器測控設(shè)備的數(shù)據(jù)通訊,
2009-08-11 09:03:0518 CAN控制器模塊世界向著網(wǎng)絡(luò)化方向發(fā)展,測控系統(tǒng)也不例外。CAN總線的出現(xiàn),使控制系統(tǒng)的網(wǎng)絡(luò)化成為可能,是國際公認(rèn)的一種現(xiàn)場總線協(xié)議。CAN (Controller Area Network)總
2009-09-21 08:39:1512 GY8608 CAN 總線接口的雙路步進電機控制器:1、CAN 總線接口,可通過同時控制2 路步進電機。2、如果只控制一路步進電機,最大工作頻率25khz。3、如果同時控制兩路步進電機,則
2010-01-14 18:40:1434 摘要:以MC68376集成CAN控制器為例,闡述了純電動車(Eleotdc Vehicle,簡稱EV)電控系統(tǒng)采用SAEJl939通信協(xié)議實現(xiàn)CAN總線通信的設(shè)計要點,給出了基于CAN通信的動力蓄電池監(jiān)
2006-03-24 12:46:151202 
基于DSP的CAN總線接口設(shè)計
1. CAN總線簡介
控制器局部網(wǎng)絡(luò)(CAN ControllerAreaNetwork)是德國Bosch公司從20世紀(jì)80年代初為解決現(xiàn)代汽車中眾多
2009-10-04 09:41:574265 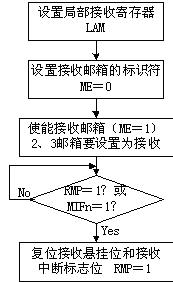
Linux環(huán)境下實現(xiàn)基于ARM9的CAN總線通信
1. 引言CAN(Controller Area Network)總線最早是由德國BOSCH公司提出,實現(xiàn)汽車環(huán)境中的微控制器通訊,在車載各電子控制裝置ECU之間
2009-11-03 09:56:15578 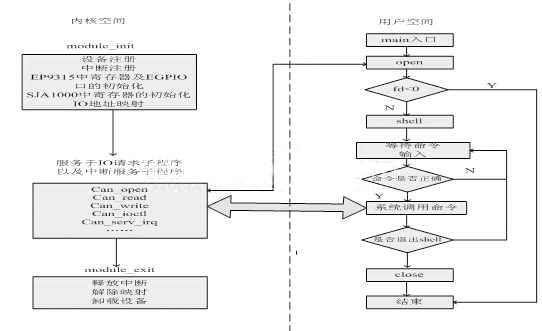
基于CAN總線的家庭控制器的設(shè)計與實現(xiàn)
引言
CAN(Controller Area Network)總線是德國Bosch公司為解決現(xiàn)代汽車中眾多的控制與測試儀器之間的數(shù)據(jù)交換而開發(fā)
2009-11-07 09:30:32662 
基于CAN總線的懸浮控制器監(jiān)控終端的設(shè)計
CAN總線是德國Bosch公司為解決現(xiàn)代汽車中多傳感器和控制器之間的數(shù)據(jù)交換而開發(fā)的一種串行總線。由于它通信速率高、通信
2010-01-25 16:25:04608 
CAN總線與RS-485總線的通信接口設(shè)計
1 CAN總線及RS-485總線簡介 CAN總線(Controller Area Network)是由德國Bosch公司于20世紀(jì)80年代專門為汽車電子控制系統(tǒng)
2010-01-27 10:46:074197 
本文提出了一套電控自動離合器的控制器方案, 并進行了系統(tǒng)的軟硬件開發(fā), 初步實現(xiàn)了自動離合器的基本功能, 設(shè)計了CAN 總線接口。
2011-03-31 11:23:192288 
本文討論這些微處理器與CAN控制器的接口問題,重點介紹CAN控制器與TMS320系列DSP的接口方法和接口電路。
2011-06-22 17:16:131059 本文首先介紹PCI總線控制器PCI9052與CAN總線通信控制器SJA1000的工作原理,并且介紹了PCI總線和CAN總線通信控制器接口的硬件和軟件實現(xiàn)方法。
2011-09-23 17:34:221938 
本文分析了目前廣泛應(yīng)用的TI公司TMS320C2000X 系列芯片中內(nèi)嵌CAN控制器的特點,介紹了CAN總線在組合機床電控系統(tǒng)間通信的系統(tǒng)設(shè)計與實現(xiàn),并在其基礎(chǔ)上重點介紹了控制器以及PC機與C
2011-09-26 17:00:3130 系統(tǒng)以PIC18F4580單片機作為中間控制器,利用自身集成的CAN控制器與各采集單元節(jié)點進行通信,通過外部擴展CAN控制器MCP2510與上位機進行通信,以雙CAN總線接口實現(xiàn)雙層、多區(qū)域數(shù)據(jù)通信。
2012-02-07 12:01:3643 基于對CAN 總線控制器的功能分析, 并應(yīng)用Verilog語言進行軟件設(shè)計, 從而實現(xiàn)CAN節(jié)點之間的通信功能。
2012-04-28 09:56:5413818 
在此利用Verilog HDL設(shè)計了一款CAN總線控制器,首先根據(jù)協(xié)議把整個CAN總線控制器劃分為接口邏輯管理、寄存器邏輯和CAN核心模塊3個模塊,然后用Verilog HDL硬件描述語言設(shè)計了各個功能模塊
2012-07-31 14:25:247806 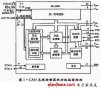
運用低功耗C0rtex-M3微控制器STM32F103VBT6和FPGA芯片設(shè)計一種基于CAN總線的運動控制器。介紹系統(tǒng)的體系結(jié)構(gòu)、主要硬件設(shè)計和軟件結(jié)構(gòu)。利用FPGA高速處理能力實現(xiàn)控制算法,與外界通信采
2013-01-31 14:33:3945 Xilinx FPGA工程例子源碼:FPGA實現(xiàn)CAN總線控制器源碼
2016-06-07 14:13:4387 接口控制新型的CAN 控制器MCP2515,使慣導(dǎo)系統(tǒng)不僅具備了接入CAN 總線的能力,而且在系統(tǒng)實現(xiàn)之后,節(jié)點可以根據(jù)現(xiàn)場應(yīng)用提出的新要求進行升級,增加了使用的靈活性。目前實驗樣機已經(jīng)設(shè)計完成,可以正確地通過CAN 總線進行通訊,達到了設(shè)計的要求。
2016-07-13 17:43:300 設(shè)計了一種基于CAN 總線的自動離合器控制器, 采用高性能微處理器XC878 完成離合器控制器軟硬件開發(fā)。設(shè)計了離合器執(zhí)行電機的驅(qū)動電路及自動離合器控制程序。針對離合器與發(fā)動機協(xié)調(diào)控制的需要,設(shè)計了CAN 總線節(jié)點接口電路及一套簡單、實用、高效的CAN 總線通信協(xié)議。
2017-09-06 09:44:4212 當(dāng)前,有一些微處理器將CAN控制器嵌入到系統(tǒng)之中,但是仍有大量人們比較熟悉的微處理器并不帶有CAN控制器。采用微處理器和CAN控制器組合的設(shè)計成為必要,而且,CAN控制器具有完成CAN總線通信
2017-10-23 15:48:0712 設(shè)計方案。通過FPGA完成CAN總線控制器、FlexRay總線控制器、RapidIO總線接口等模塊功能,實現(xiàn)高速接口的控制和擴展,并使模塊接口具備可配置能力。測試結(jié)果表明,CAN接口及FlexRay接口在指定的波特率下均工作正常,滿足項目要求的各項性能指標(biāo)。
2017-11-18 07:25:449023 
利用CAN總線開發(fā)的純電動車(EV)電控系統(tǒng)的通信網(wǎng)絡(luò)具有通信速率高、準(zhǔn)確、可靠性高的特點,易于整車控制網(wǎng)絡(luò)的連接和管理,為傳感器信號、各個控制單元的計算信息和運行狀態(tài)的共享以及隨車或離車故障診斷等提供了基礎(chǔ)平臺,同時開發(fā)基于該通信網(wǎng)絡(luò)的控制器在線標(biāo)定和實時監(jiān)測系統(tǒng)也成為可能。
2018-07-20 08:43:009948 
控制器,而無法利用CAN總線來進行通信。為了使得LPC2131能夠利用CAN總線進行通信,可以通過外部擴展來實現(xiàn)其功能。目前,比較普通的方法是在LPC2131的外部采用CAN控制器設(shè)計CAN總線接口。LPC2131與CAN控制器的接口電路如圖1所示。
2019-04-18 08:08:002785 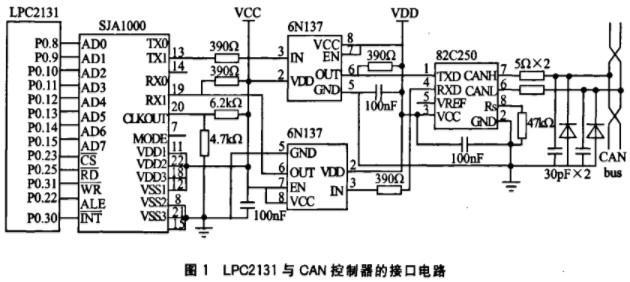
由于CAN總線相比其它現(xiàn)場總線技術(shù)具有眾多優(yōu)點,因此在工業(yè)中的應(yīng)用越來越廣泛。本文基于該總線技術(shù)針對熱網(wǎng)監(jiān)控系統(tǒng)開發(fā)的現(xiàn)場控制和通信的子系統(tǒng),能安全可靠地實現(xiàn)現(xiàn)場數(shù)據(jù)采集、閉環(huán)控制及數(shù)據(jù)傳輸。鑒于篇幅,本文重點介紹CAN網(wǎng)絡(luò)通信部分的設(shè)計與實現(xiàn)。
2020-06-05 07:51:001849 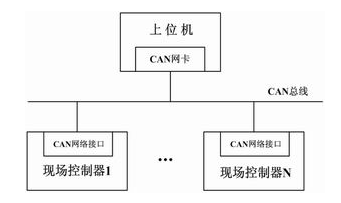
MCP25l0是Microchip公司生產(chǎn)的一種獨立的可編程CAN控制器芯片。本文將介紹新型的獨立CAN通信控制器MCP2510,并給出其在CAN總線系統(tǒng)智能節(jié)點中的應(yīng)用實例。
2019-09-26 08:01:002804 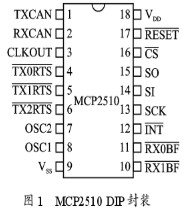
硬件部分主要包括主控制器、CAN總線控制器、CAN總線收發(fā)器以及與計算機的RS 232通信接口芯片等。系統(tǒng)的總體結(jié)構(gòu)如圖1所示。主控制器通過CAN總線接口接收和緩存數(shù)據(jù)。根據(jù)PC機的命令進行選擇性的數(shù)據(jù)傳輸。
2019-03-26 13:56:521367 本文參照CAN2.0 總線協(xié)議設(shè)計了一個CAN 控制器軟核。具體設(shè)計采用TOP-DOWN 方式,上層采用模塊化設(shè)計,最底層模塊以Verilog 語言編寫而成。測試了軟核在Xilinx 公司
2019-07-19 17:48:4124 能力。其內(nèi)嵌的增強型CAN 總線控制器(ECAN)模塊,完全兼容CAN 2.0B 協(xié)議,郵箱數(shù)量增加至32 個,并增加了時間戳、消息過濾和超時發(fā)送功能,提高了應(yīng)用CAN通信的靈活性。
2019-07-26 15:40:477632 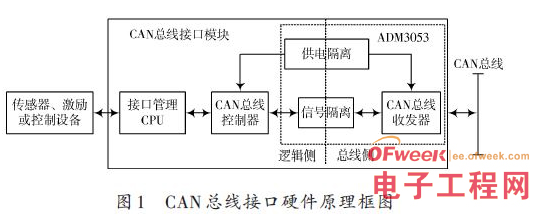
在這個項目中,我們將了解MCP2515 CAN控制器模塊,如何將MCP2515 CAN總線控制器與Arduino接口,以及如何在兩個MCP2515 CAN的幫助下實現(xiàn)兩個Arduino板之間的通信控制器和CAN協(xié)議。
2019-07-30 10:51:5819045 能力。其內(nèi)嵌的增強型CAN 總線控制器(ECAN)模塊,完全兼容CAN 2.0B 協(xié)議,郵箱數(shù)量增加至32 個,并增加了時間戳、消息過濾和超時發(fā)送功能,提高了應(yīng)用CAN通信的靈活性。
2019-08-02 15:49:222290 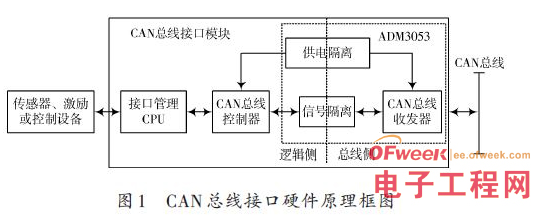
相比,CAN總線的數(shù)據(jù)通信具有突出的可靠性、實時性和靈活性,它在汽車領(lǐng)域上的應(yīng)用最為廣泛,世界上一些著名的汽車制造廠商,如BENZ(奔馳)、BWM(寶馬)、Volkswagen(大眾)等都采用了CAN總線來實現(xiàn)汽車內(nèi)部控制系統(tǒng)與各檢測和執(zhí)行機構(gòu)間的數(shù)據(jù)通信。目前,CAN總線的應(yīng)用范圍已不僅
2020-01-15 08:00:007 硬件電路的設(shè)計主要是CAN通信控制器與微處理器之間和CAN總線收發(fā)器與物理總線之間的接口電路的設(shè)計。CAN通信控制器是CAN總線接口電路的核心,主要完成CAN的通信協(xié)議,而CAN總線收發(fā)器的主要功能是增大通信距離,提高系統(tǒng)的瞬間抗干擾能力,保護總線,降低射頻干擾(RFI),實現(xiàn)熱防護等。
2020-03-13 10:45:506646 
本文在分析can總線航天應(yīng)用的基礎(chǔ)上,從硬件原理設(shè)計、cpu與can總線接口實現(xiàn)以及can總線通信軟件設(shè)計等方面進行了論述。
2020-04-02 09:53:062837 
CAN總線是一種有效支持分布式控制系統(tǒng)或?qū)崟r控制的串行通信網(wǎng)絡(luò),是一個多主總線,總線上的各個節(jié)點都有權(quán)隨時向其他節(jié)點發(fā)送信息,總線沖突時通過總線仲裁機制來決定占用總線的節(jié)點。CAN能夠使用多種物理
2020-04-12 10:49:00944 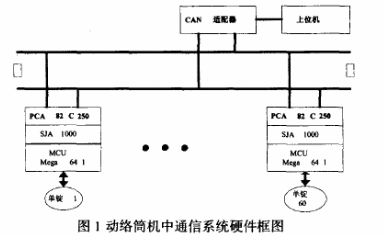
的實現(xiàn)方案。基于中斷任務(wù)調(diào)度模式實現(xiàn)了運動控制器,由模糊自整定PD調(diào)節(jié)器來改良AGV的動態(tài)跟蹤行為;監(jiān)控管理系統(tǒng)包括六種交互模塊,其發(fā)送與接收通信過程通過適時線程掛起與逐步接收匹配操作來協(xié)作完成。經(jīng)現(xiàn)場實測,AGV工作穩(wěn)定可靠,跟蹤
2020-10-26 17:08:1739 接口控制新型的CAN 控制器MCP2515,使慣導(dǎo)系統(tǒng)不僅具備了接入CAN 總線的能力,而且在系統(tǒng)實現(xiàn)之后,節(jié)點可以根據(jù)現(xiàn)場應(yīng)用提出的新要求進行升級,增加了使用的靈活性。目前實驗樣機已經(jīng)設(shè)計完成,可以正確地通過CAN 總線進行通訊,達到了設(shè)計的要求。
2021-01-27 15:52:0014 文章介紹了CAN總線通信協(xié)議和Motorola新一代嵌入式控制器DSP56F805內(nèi)置的用于實現(xiàn)CAN通信的MSCAN模塊,并通過編程實例說明了MSCAN模塊的應(yīng)用方法,最后介紹了研華公司生產(chǎn)的CAN總線通信卡PCL841的使用方法。
2021-03-15 16:24:2714 選用帶有ARM7TDMI-S內(nèi)核的LPC2292微控制器,可實現(xiàn)對車速、轉(zhuǎn)速信號、開關(guān)量信號以及水溫、剎車氣壓、輪胎壓力等模擬量信號的采集、處理以及數(shù)據(jù)的實時存儲和顯示,通過串口、USB接口可以實現(xiàn)與PC機之間的數(shù)據(jù)通信,通過 CAN和LIN總線接口可實現(xiàn)與汽車上的CAN或LIN節(jié)點間的數(shù)據(jù)通信。
2021-04-02 09:13:142197 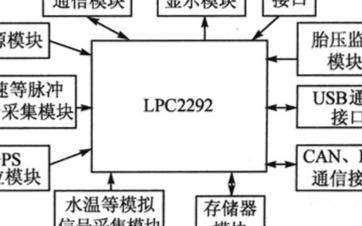
麥可科技研發(fā)的CAN總線接口模塊、擁有2/4路獨立CAN通道。 板載的120歐姆終端電阻,用戶可以根據(jù)使用情況,用跳線選擇,當(dāng)節(jié)點為端節(jié)點時應(yīng)連接該電阻。
2021-04-20 10:32:5520 在現(xiàn)場總線概念的出現(xiàn)到現(xiàn)在的近20年時間里,已經(jīng)出現(xiàn)了好幾種現(xiàn)場總線技術(shù)并走向成熟。其中CAN總線已被公認(rèn)為幾種最有前途的現(xiàn)場總線之一。CAN是一種由帶有CAN控制器組成的高性能串行數(shù)據(jù)局域通信網(wǎng)絡(luò),是國際上應(yīng)用最廣泛的現(xiàn)場總線之一。
2021-04-20 15:55:3023 為在Ⅴ X Works系統(tǒng)下實現(xiàn)龍芯3A3000主板的控制器局域網(wǎng)(CAN)總線通信,采用SJA1000T設(shè)計基于pCⅠ總線的8通道CAN通信板,并提出相應(yīng)的驅(qū)動設(shè)計和優(yōu)化方案。對龍芯3A3000
2021-06-02 14:32:1817 MCP2510是Microchip公司生產(chǎn)的一種獨立的可編程CAN控制器芯片。本文將介紹新型的獨立CAN通信控制器MCP2510,并給出其在CAN總線系統(tǒng)智能節(jié)點中的應(yīng)用實例。
2021-06-23 15:16:333451 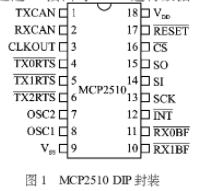
沒有調(diào)試。項目概述:利用STM32作為主控制芯片,設(shè)計出利用CAN總線傳輸數(shù)據(jù)的通信節(jié)點,在查閱STM32和CAN總線等相關(guān)文獻和資料基礎(chǔ)上,確定節(jié)點的總體設(shè)計方案,主要包括電源模塊、微控制器模塊、氣體傳感器模塊、LCD模塊、報警模塊等組成【資源下載】下載地址如下(851):https://docs
2021-12-24 19:30:1046 CAN 總線插卡可以任意插在 PC AT XT 兼容機上,方便地構(gòu)成分布式監(jiān)控系統(tǒng)。因此,用 FPGA 實現(xiàn) CAN 總線通信控制器具有非常重要的應(yīng)用價值。本篇將通過一個實例講解利用 FPGA 實現(xiàn) CAN 總線通信控制器的實現(xiàn)方法。
2022-07-29 09:43:222177 CAN總線由CAN控制器、CAN收發(fā)器、數(shù)據(jù)傳輸線、數(shù)據(jù)傳輸終端等組成。CB311的ECU(發(fā)動機控制單元)、TCU(變速器控制單元)、FEPS(無鑰匙進入和無鑰匙啟動系統(tǒng))、組合儀表四個電控單元通過CAN總線連接,CAN控制器、CAN收發(fā)器均集成在電控單元中。
2022-12-02 11:47:092259 今天給大俠帶來基于FPGA的CAN總線控制器的設(shè)計,由于篇幅較長,分三篇。今天帶來第一篇,上篇,CAN 總線協(xié)議解析以及 CAN 通信控制器程序基本框架。話不多說,上貨。
2023-05-18 09:21:30868 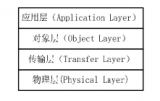
節(jié)點的硬件接口電路。基于對CAN 總線控制器的功能分析, 并應(yīng)用Verilog語言進行軟件設(shè)計, 從而實現(xiàn)CAN節(jié)點之間的通信功能。 0 引言 CAN 總線允許高達1M bit /s通訊速率, 支持多主通訊模式, 有高抗電磁干擾性而且能夠檢測出通信過程中產(chǎn)生的任何錯誤, 已被廣泛應(yīng)用到各自動
2023-06-18 11:15:011796 can總線 i/o模塊能否充當(dāng)控制器?答案當(dāng)然是不行!因為它并沒有主站控制功能。 雖然都有總線接口,都集成了很多的IO,但can總線 i/o模塊并沒有被寫入控制程序,它的任務(wù)職責(zé)只是充當(dāng)
2023-06-28 08:35:02387 圓草捆打捆機電控系統(tǒng)以長沙碩博電子4.3寸顯示屏、SPC-SFMC-X2214A控制器為核心,具有8~32VDC寬壓輸入、耐震動、寬溫域、高防護等特性。駕駛室4.3寸屏顯示屏與捆草機控制器通過CAN
2022-07-06 14:09:19890 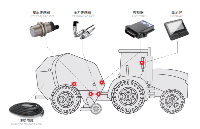
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論