 電子發燒友App
電子發燒友App


在當今的現代化社會,科技發展迅速,物品向小型化、微型化發展已經成為一種必然。本設計通過在指定的物品上掛載標簽,采用UHF射頻卡讀寫器作為控制核心對目標標簽加以識別與讀取,配合鏈接MSP430處理器及自制的圓極化天線,實現了物品的定位功能,并通過配合使用GSM模塊,以短消息的方式告知主人物品的位置及安全信息。標簽的信息可通過PC機鍵盤輸入進行更改。UHF射頻卡讀寫器中的防碰撞算法保證了標簽讀取的抗干擾性和穩定性,自制天線的高增益和優良性能為有效搜索范圍提供了保障。
1 、原理分析與硬件電路圖
1.1 整體原理結構圖
按圖1所示,整個系統由UHF射頻讀寫器與天線、GSM模塊、MSP430處理器、屏顯設備及輸入設備相連接而成。有效地實現了物品——系統——用戶的緊密聯接,從而達成了設計功能要求。

1.2 天線部分
1.2.1 天線的設計原理
根據腔模理論,微帶貼片天線用帶線或同軸探針激勵時,電磁場在貼片和接地板間建立。矩形貼片可當成一個等效的開路邊界的諧振腔,它四周為理想磁壁,周壁磁場等于零; 上下壁為理想電壁[4]。
貼片形狀結構的不同會導致天線性能的迥異,在方形貼片對角線上像波導拐彎那樣切掉一個45°的角。該分離單元就可以使饋電場形成兩個空間正交簡并模的諧振頻率發生分離。為實現圓極化, 這兩個模必須達到幅值相等、相位相差90°。相等幅值可以通過適當選擇饋電位置實現,需選取饋電點選取位于切角貼片中心線上。90°相移的產生有兩個因素,一個是饋電點位置,另一個是分離單元的尺寸。由腔模理論知微帶貼片天線激勵模可等效為一并聯的RLC 諧振電路[5]。為了使電子標簽在各個位置都能被識別,設計采用圓極化天線。微帶天線的圓極化帶寬近似與其Q值成反比,因此為了得到寬頻帶的圓極化微帶天線,我們選擇空氣作為介質,既節約了成本也降低了天線的損耗,并且也能保證天線擁有良好的圓極化特性。用4個輔助支撐柱配合金屬探針固定貼片,保證了貼片平整穩固的同時,讓金屬探針起到更好的饋電作用。通過仿真、測試,可以最終選定天線的特性及優化其性能。
1.2.2 天線的結構及尺寸
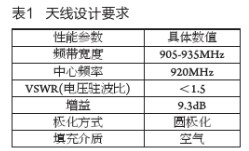
本設計天線為圓極化貼片天線,具體設計要求和參數性能如表1所示。
1.3 UHF射頻讀寫器模塊
1.3.1 UHF射頻讀寫器基本原理
UHF系統結構如圖3所示,讀寫器作為整個系統的重要組成部分,其基帶處理性能的優劣將直接影響讀寫器性能的優劣。
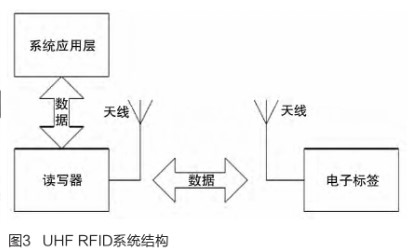
讀寫器通過射頻信號與標簽進行通信,完成信息交換。在 UHF RFID 系統中,一般讀寫器先發送一條命令給電子標簽,標簽收到命令后進行應答響應。標簽根據命令返回有用數據信息給讀寫器。讀寫器對標簽返回信號處理后再傳回上位機。
本設計中的UHF主要實現了以下幾個功能:
(1)讀寫器與電子標簽進行通信。讀寫器向電子標簽發送命令,電子標簽根據命令進行響應,返回有用數據。
(2)讀寫器與上位機進行通信。讀寫器通過特定接口與上位機相連接,如RS-232、USB、RJ45 等。上位機向讀寫器發送控制命令,控制讀寫器對標簽的操作。讀寫器將標簽返回的信息傳回給上位機。
(3)讀寫器可以完成對多個標簽的讀寫功能,實現了防碰撞處理。
(4)讀寫器具有數據校驗的功能。能夠對數據的正確性進行判斷。
1.3.2 UHF射頻讀寫器的硬件部分
射頻模塊是讀寫器射頻信號處理模塊,設計要解決的主要問題是抑制干擾,正確進行信號收發,射頻模塊的主要任務如下:
(1)根據協議要求發射一定功率的射頻信號,激活工作區域內的無源標簽并為其正常工作提供能量;
(2)將待發射的編碼信號調制到射頻,把數據和命令傳送給標簽;
(3)接收標簽返回的射頻信號并進行下變頻處理;
(4)控制頻率綜合器進行跳頻處理。本次設計中的UHF采用AS3992 射頻芯片,AS3992支持 PM 調制和AM 調制,這樣射頻芯片在 I/Q 兩路信號自動選擇時不會出現通信的盲點,而且射頻芯片還自帶 A/D 轉換電路,可以用于測量讀寫器的發射功率。
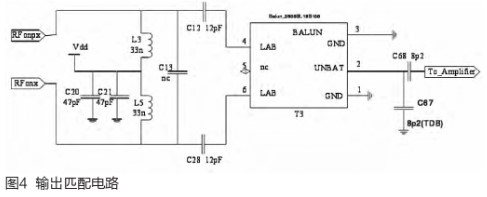
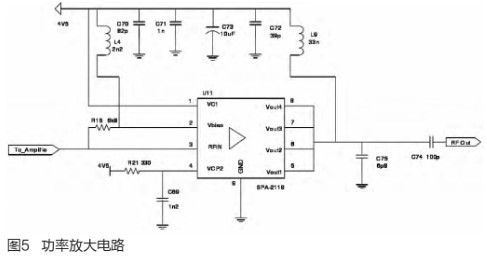
對于讀寫器的射頻發射電路部分,AS3992 可以采用低功率線性輸出模式或低功率差分輸出模式,我們采用低功率線性輸出模式。通過外部的功率放大器,將輸出功率放大到 23dBm-30dBm 之間。AS3992 射頻發射電路主要由耦合匹配電路、功率放大電路、差分轉單端電路、濾波電路和定向耦合電路構成。輸出匹配電路將解耦、差分轉單端電路、匹配電路作為整體由匹配電路輸出,輸出匹配電路如圖4所示,功率放大電路如圖5所示。
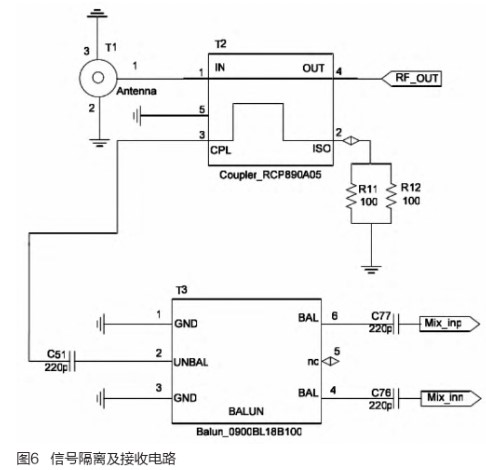
UHF RFID 讀寫器可以使用兩個天線,將接收和發送分開或者使用一個天線但需要射頻隔離電路,考慮到使用射頻隔離電路可以降低設計成本,所以采用了定向耦合器作為收發隔離電路,具體電路如圖6所示。
RFID 讀寫器從功能模塊上劃分為射頻模塊和基帶模塊,缺少任何一個模塊都不能構成完整的讀寫系統。基帶模塊主要功能如下:
(1)控制標簽與讀寫器間的數據交換;
(2)執行單標簽識別和防沖撞算法;
(3)與上位機軟件進行通信,并執行從上位機軟件發來的命令;
(4)控制讀寫器和標簽間的身份驗證;
(5)控制頻率步進和發射信號功率。
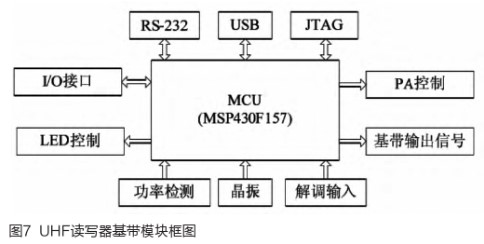
基帶模塊由微處理器、通信接口電路、電源電路及輔助電路等部分組成。基帶模塊總體框圖,如圖7所示。
1.4 GSM模塊
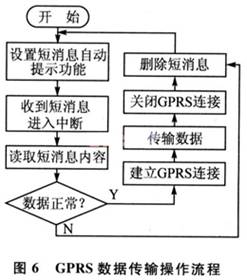
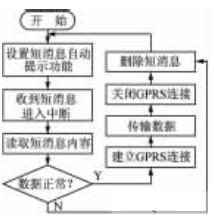
在本次設計中,MSP430F149單片機通過RS232串口與GSM模塊通信,使用標準的AT命令控制GSM模塊實現各種無線通信功能。通過GSM模塊與MSP430F149單片機的配合使用,我們可以將重要的信息在第一時間以短信的方式發送給用戶,如果標簽所標記的物件超出我們設定的安全范圍,用戶的手機將收到GSM模塊發送的報警提醒信息,達到了防止失竊的目的;物品丟失后,用戶也能收到包含丟失物品名稱、丟失具體時間等信息的短信,方便用戶找回失物。
1.5 PC輸入導致顯示模塊
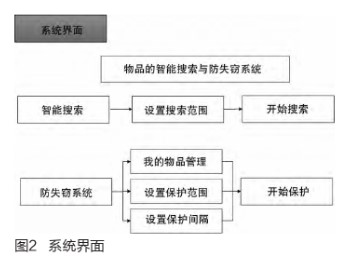
通過PC鍵盤輸入,可以編寫或修改電子標簽所標記的物品信息,設置保護物品的安全范圍,在實現尋物目的時,可以設定尋物范圍,方便用戶進行失物的搜索。并將這些設定的內容與信息在屏幕上顯示,顯示屏幕采用液晶觸摸屏,顯示清晰簡潔操作方便,實現了人機界面友好的目的。
2、軟件設計與流程
2.1 系統的軟件整體
下面將介紹本次設計系統的軟件部分,整體軟件的設計思路如下圖所示,軟件主要包括三個部分:(1)UHF部分的防碰撞算法;(2)MSP430F149單片機整體控制程序;(3)GSM模塊短信發送程序編寫。
2.2 UHF讀寫器整體軟件模塊
讀寫器軟件模塊劃分以及模塊間結構關系如圖8所示。
2.3 UHF防碰撞算法
讀寫器在沒有采用多址訪問控制機制的情況下,如果個能被同一讀寫器識別的多個電子標簽同時處在讀寫器能夠識別的范圍內,電子標簽將同時響應讀寫器的指令。信道會被電子標簽爭用,導致信號互相干擾,讀寫器不能正確接收數據,也不能準確識別電子標簽信息。當多個電子標簽使讀寫器發生判斷錯誤,讀寫器會認為電子標簽不在自己的作用范圍內或無法讀取信息,即發生了碰撞問題。
通過查閱相關資料,了解到目前廣泛應用的防碰撞算法基本上都是 TDMA(Time Division Multiple Access,時分多址)法。主要分為兩類TDMA法:分別是基于ALOHA的防碰撞算法和基于二叉樹的防碰撞算法,這兩種算法在RFID系統中都有廣泛的應用。在 RFID中ALOHA算法被分為:純ALOHA算法、時隙ALOHA算法、幀時隙ALOHA算法、動態幀時隙 ALOHA算法。本次設計的UHF讀寫器采用動態幀時隙 ALOHA算法。
讀寫器可以統計出一幀時隙中成功識別的時隙數Nr,發生碰撞的時隙數Nc,如果當前讀寫器周圍的電子標簽數為N,則剩余的電子標簽數為N-Nr。 根據對動態幀時隙算法的分析可知,下一幀的時隙數為L1=N-Nr。通過查閱相關算法資料得知,電子標簽的估計公式為:N=Nr+2.39Nc。
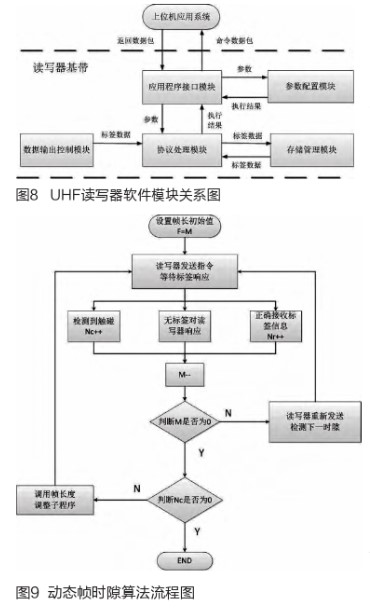
動態幀時隙 ALOHA 算法先初始化幀長F=M,M的值可根據實際情況設定;幀周期內初始化:Nc=Nr=0,Nc為碰撞時隙數,Nr 為正確接收時隙數。讀寫器發送帶有幀時隙長度的指令,等待讀寫器識別范圍內的電子標簽響應指令。圖5-3表示整個電子標簽防碰撞算法的識別過程。
讀寫器對一幀中各個時隙進行檢測,檢測結果可分為三種情況:
(1)正確接收電子標簽信息Nr+1;
(2)電子標簽發生碰撞Nr+1;
(3)無電子標簽應答信號。
在上述的三種情況中,每檢測完一個時隙都要使時隙數M-1,如果時隙數M為0則判斷Nc是否也為0,如果Nc也為0就表示沒有電子標簽發生碰撞且都被識別;如果Nc不為0則表示電子標簽發生碰撞,根據Nc的大小重新調整M的值,對剩余電子標簽進行讀寫,直到所有電子標簽都被識別。
3 、系統測試與誤差分析
3.1 天線仿真與測試結果(數據)
利用HFSS軟件,我們仿真了天線,其仿真數據如下:
通過矢量網絡測試儀測試,實際天線在0.92GHz處S11達到-17.5dB,其增益為8.7dB。通過旋轉標簽,測試天線的圓極化特性,發現無論標簽如何放置,都可準確讀取,確認圓極化特性良好。
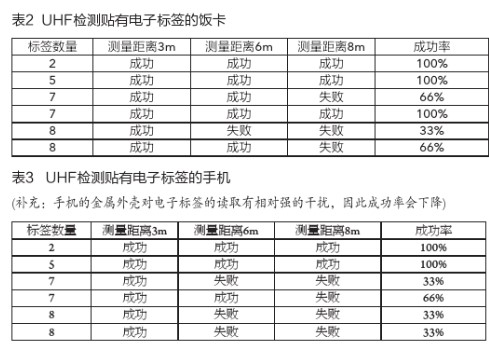
3.2 UHF讀寫器測試結果
利用貼有電子標簽的物品對UHF讀寫器的有效識別范圍、標簽識別個數以及靈敏度等性能進行測量,測量結果如下表所示。
3.3 GSM短信功能測試結果
GSM模塊的掛載使系統人機交流更加豐富,智能化得到體現。
責任編輯:gt











 工商網監
工商網監
評論