完善資料讓更多小伙伴認(rèn)識(shí)你,還能領(lǐng)取20積分哦,立即完善>
電子發(fā)燒友網(wǎng)技術(shù)文庫(kù)為您提供最新技術(shù)文章,最實(shí)用的電子技術(shù)文章,是您了解電子技術(shù)動(dòng)態(tài)的最佳平臺(tái)。
庫(kù)卡機(jī)器人的安全信號(hào)與IO模塊是相互獨(dú)立的,即安全信號(hào)不是通過(guò)IO信號(hào)接入到機(jī)器人里。安全信號(hào)主要是指:急停、安全門等屬于機(jī)器人安全控制類的信號(hào)。...

準(zhǔn)備樹(shù)莓派和 CRICKIT Hat 1、如果你已經(jīng)安裝了 CRICKIT Hat 的 40 針連接器的轉(zhuǎn)接端子,請(qǐng)將其取下。 如果我們希望按鈕引線適合而不被后面板壓扁,我們需要帽子以非常低的外形安裝在樹(shù)莓派的頂部。 注意:如果你打算在樹(shù)莓派上安裝散熱器,請(qǐng)使用非常低調(diào)的散熱器以避免 ...

在示教器中編程調(diào)用程序的話,是可以通過(guò)proccall,而在robstudio中編程,則可以直接通過(guò)復(fù)制程序的名稱,然后粘貼到main主程序中。 當(dāng)然了,proccall調(diào)用子程序的數(shù)量也并非是無(wú)限的: “程序可相互調(diào)用,并反過(guò)來(lái)調(diào)用另一個(gè)程序。...

諧波減速機(jī)由波發(fā)生器、柔性齒輪、剛性齒輪三個(gè)基本構(gòu)件組成,是一種靠波發(fā)生器裝配上柔性軸承使柔性齒輪產(chǎn)生可控彈性變形,并與剛性齒輪相嚙合來(lái)傳遞運(yùn)動(dòng)和動(dòng)力的齒輪傳動(dòng)。...

瓦特連桿是用來(lái)作進(jìn)直線運(yùn)動(dòng)的,一般見(jiàn)于車底。 瓦特連桿是由瓦特發(fā)明的,沒(méi)錯(cuò)就是那個(gè)特別流弊改良了蒸汽機(jī)的瓦特。在瓦特連桿中,移動(dòng)的中點(diǎn)自由度被限制,只得做近似直線運(yùn)動(dòng)。最早是用在瓦特蒸汽輪機(jī)上的,后來(lái)也用做汽車的懸架結(jié)構(gòu)中了。...
自動(dòng)化任務(wù)對(duì)提高效率而言至關(guān)重要,因此,即使您的機(jī)器人目前由人工控制,某些這類由人工控制的任務(wù)未來(lái)很可能也會(huì)實(shí)現(xiàn)自動(dòng)化。看看目前的機(jī)器學(xué)習(xí)/人工智能硬件您就會(huì)發(fā)現(xiàn),電源需求可能令人生畏,但 Vicor 解決方案已經(jīng)滿足了這些需求。...

RS60E憑借卓越的性能、簡(jiǎn)易的操作、優(yōu)良的品質(zhì)等特點(diǎn),在機(jī)器人領(lǐng)域能盡其所能、一展所長(zhǎng),提供完善的解決方案,為客戶持續(xù)創(chuàng)造價(jià)值,是小型六關(guān)節(jié)機(jī)器人、DELTA機(jī)器人及SCARA機(jī)器 人等的理想驅(qū)動(dòng)產(chǎn)品選擇。...

對(duì)于一個(gè)經(jīng)典的SLAM問(wèn)題,假設(shè)xt是t時(shí)刻的狀態(tài)量,z1:t為時(shí)刻的觀測(cè)量,u1:t是1:t時(shí)刻的控制量,m是地圖,則SLAM需要求解的是在已知控制量、觀測(cè)量概率分布的情況下,機(jī)器人的位姿狀態(tài)以及地圖最優(yōu)估計(jì)的問(wèn)題。...

金升陽(yáng)非隔離降壓/升降壓電源KJB/KUB系列具有超寬輸入電壓、低空載功耗、高效率、集成多種保護(hù)功能等優(yōu)勢(shì),為客戶帶來(lái)更優(yōu)選擇。...

機(jī)器視覺(jué)作為與人眼類似的機(jī)器仿生系統(tǒng),從廣義角度凡是通過(guò)光學(xué)裝置獲取真實(shí)物體的信息以及對(duì)相關(guān)信息的處理與執(zhí)行都是機(jī)器視覺(jué),這就包括了可見(jiàn)視覺(jué)以及非可見(jiàn)視覺(jué),甚至包括人類視覺(jué)不能直接觀察到的、物體內(nèi)部信息的獲取與處理等。...
基于搜索的路徑規(guī)劃算法已經(jīng)較為成熟且得到了廣泛應(yīng)用,常常被用于游戲中人物和移動(dòng)機(jī)器人的路徑規(guī)劃。...

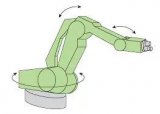
工業(yè)機(jī)器人的基本結(jié)構(gòu)包括機(jī)身、臂部、手腕和指部。這些部件共同構(gòu)成了機(jī)器人的運(yùn)動(dòng)系統(tǒng),使其能夠在三維空間中進(jìn)行精確的定位和運(yùn)動(dòng)。...

AI 先從一塊大約肥皂大小的塊狀物質(zhì)開(kāi)始,起初這團(tuán)物質(zhì)只會(huì)搖晃,完全無(wú)法行走。AI 知道自己的目標(biāo)尚未達(dá)成,于是迅速迭代設(shè)計(jì)。...
更柔性化的自動(dòng)化產(chǎn)線才能滿足如今車企的生產(chǎn)需求,相對(duì)于柔性化程度不足的工業(yè)機(jī)器人而言,協(xié)作機(jī)器人同時(shí)擁有交互安全、即插即用、快速部署等優(yōu)勢(shì),能夠應(yīng)對(duì)各種復(fù)雜工藝,極大降低改造成本,提升產(chǎn)線靈活性,充分滿足當(dāng)前汽車行業(yè)柔性智造需求。...

精確的校準(zhǔn)能力使 Optimus 更高效地學(xué)習(xí)各種任務(wù),并且僅使用視覺(jué),其神經(jīng)網(wǎng)絡(luò)完全實(shí)現(xiàn)了 on-board 運(yùn)行。 這樣一來(lái),Optimus 可以完全自主地將物體按顏色進(jìn)行分類。...
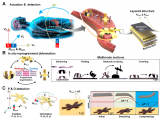
北京航空航天大學(xué)陳華偉教授課題組報(bào)道了一種全新磁控機(jī)器人設(shè)計(jì)制造技術(shù),針對(duì)磁控機(jī)器人的原位運(yùn)動(dòng)編程和位姿感知需求,通過(guò)4D噴涂打印制備一種新的碳-磁薄膜多層材料,實(shí)現(xiàn)電熱磁化和電阻應(yīng)變傳感的功能耦合,達(dá)到多模態(tài)驅(qū)動(dòng)和位姿感知一體化。...
用于扭轉(zhuǎn)的機(jī)器人電纜只能用作固定電纜。它也可以與用于移動(dòng)部件的電纜一起使用。...
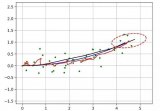
該算法利用擴(kuò)展卡爾曼濾波器(Extended Kalman Filter, EKF)實(shí)現(xiàn)傳感器混合本地化。 藍(lán)線為真實(shí)路徑,黑線為導(dǎo)航推測(cè)路徑(dead reckoning trajectory),綠點(diǎn)為位置觀測(cè)(如GPS),紅線為EKF估算的路徑。...
機(jī)器人使用了大量的現(xiàn)代電子信息和控制技術(shù),比如機(jī)器人的控制系統(tǒng),轉(zhuǎn)動(dòng)利用的電機(jī)驅(qū)動(dòng)技術(shù),采集和定位使用了傳感和視覺(jué)檢測(cè)以及計(jì)算機(jī)分析計(jì)算技術(shù),執(zhí)行機(jī)構(gòu)同樣用到了精確控制技術(shù)。...
關(guān)注我們的微信

下載發(fā)燒友APP

電子發(fā)燒友觀察

版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長(zhǎng)沙市望城經(jīng)濟(jì)技術(shù)開(kāi)發(fā)區(qū)航空路6號(hào)手機(jī)智能終端產(chǎn)業(yè)園2號(hào)廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號(hào)-1




