完善資料讓更多小伙伴認識你,還能領(lǐng)取20積分哦,立即完善>
標簽 > lidar
LiDAR是一種集激光,全球定位系統(tǒng)和慣性導(dǎo)航系統(tǒng)三種技術(shù)與一身的系統(tǒng),用于獲得數(shù)據(jù)并生成精確的DEM。這三種技術(shù)的結(jié)合,可以高度準確地定位激光束打在物體上的光斑。
文章:331個 瀏覽:30331次 帖子:3個
目前視覺SLAM系統(tǒng)可以在微型個人計算機(PC)和嵌入式設(shè)備中運行,甚至可以在智能手機等移動設(shè)備中運行(Klein和Murray,2009)。與室內(nèi)或室...

汽車激光雷達技術(shù)面臨的機遇和挑戰(zhàn)是什么
汽車激光雷達落地主要是在PC與LCV和Robotaxi(無人駕駛出租車)兩大領(lǐng)域,其各自有不同的發(fā)展態(tài)勢。自2019年以來,Robotaxi在這一市場中...

在動態(tài)環(huán)境中,機器人需要對具有微秒級延遲的運動事件進行瞬時檢測。這個任務(wù),稱為移動事件檢測,通常是使用事件相機來實現(xiàn)的。盡管激光雷達( Light De...
2024-01-21 標簽:機器人激光雷達數(shù)據(jù)集 1428 0

在不斷發(fā)展的汽車技術(shù)領(lǐng)域,LiDAR(光探測和測距)傳感器——也就是“激光雷達”——已成為關(guān)鍵組件,隨著汽車行業(yè)向自主化邁進,激光雷達傳感器在提供安全導(dǎo)...
作者:Jeff Shepard 隨著人與自主移動機器人 (AMR),也稱為工業(yè)移動機器人 (IMR) 在同一區(qū)域工作的情況越來越多,多種固有安全風險亟待...

目前市場上的4D 毫米波雷達每幀約輸出 1000 多點,而一個 128 線激光雷達每幀輸出可達十幾萬點,二者輸出的數(shù)據(jù)量相差了 2 個數(shù)量級之多。
ADS感知的數(shù)據(jù)驅(qū)動DDM模型,其安全可信某種程度上其實是來自與訓練數(shù)據(jù)中隱含的行為定義,這對實現(xiàn)ADS安全至上的感知帶來了大挑戰(zhàn)。實際行駛應(yīng)用中(可以...
數(shù)字孿生將如何大幅減少自動駕駛汽車的現(xiàn)場測試
自動駕駛汽車的緩慢崛起有多種根本原因。除了基礎(chǔ)設(shè)施、法律和驗收方面的挑戰(zhàn)外,轉(zhuǎn)向眼球和腦后駕駛將需要汽車制造商克服許多挑戰(zhàn)。其中包括選擇正確的傳感器,將...

實現(xiàn)圖像與其重建對象之間的精確2D-3D對應(yīng)關(guān)系對于準確的圖像定位至關(guān)重要,一種有前景的方法涉及在圖像和激光雷達平面之間建立對應(yīng)關(guān)系,激光雷達平面可以被...
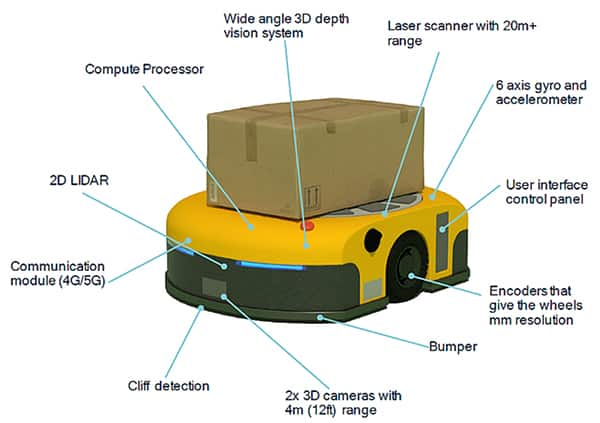
應(yīng)用于機器人3D感知的高精度LiDAR與電機驅(qū)動解決方案
機器人想要進行自主移動,便需要擁有3D感知(3D perception)功能,必須利用各種的傳感器來實時掌握機器人在空間中的位置,其中以LiDAR(激光...
什么是LiDAR?LiDAR技術(shù)的新時代 前景廣闊未來可期
什么是LiDAR? ? LiDAR 是Light Detection And Ranging(激光探測與測距)的縮寫,是使用近紅外光、可見光或紫外光照射...
2024-05-16 標簽:GaNRohm激光探測技術(shù) 1249 0
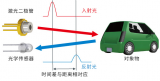
自動駕駛的出現(xiàn)決定性地擴大了汽車電子平臺中激光成像檢測和測距 (LiDAR) 傳感器的存在。LiDAR 根據(jù)雷達原理工作,但使用紅外激光二極管發(fā)出的光脈沖。

用于高分辨率激光雷達的氮化鎵HEMT電路拓撲結(jié)構(gòu)
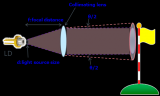
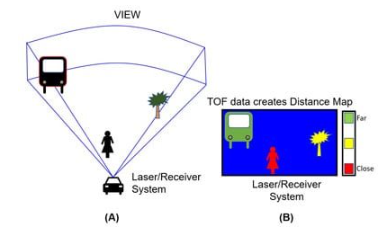
激光雷達(LiDAR)基于通過將光束照射到物體上并準確測量反射的飛行時間來估算距離的原理。通過將發(fā)射光掃過真實世界的場景,可以收集三維信息以供計算機系統(tǒng)...
2023-05-06 標簽:拓撲結(jié)構(gòu)氮化鎵激光雷達 1213 0

與傳統(tǒng)的基于SiPM或者APD的激光雷達架構(gòu)相比,SPAD一顆芯片替代了以往光電前端→放大鏈路→模數(shù)轉(zhuǎn)換→數(shù)字信號處理的絕大多數(shù)分立元器件,大大簡化了架...

LOG-LIO: 一種高效局部幾何信息估計的激光雷達慣性里程計方法
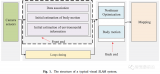
LOG-LIO的流程接收來自3D激光雷達和慣性測量單元(IMU)的輸入,如圖2所示。對于新的輸入掃描,我們首先使用Ring FALS來估計原始點的法線,...
2023-08-18 標簽:激光雷達數(shù)據(jù)集LIDAR 1183 0
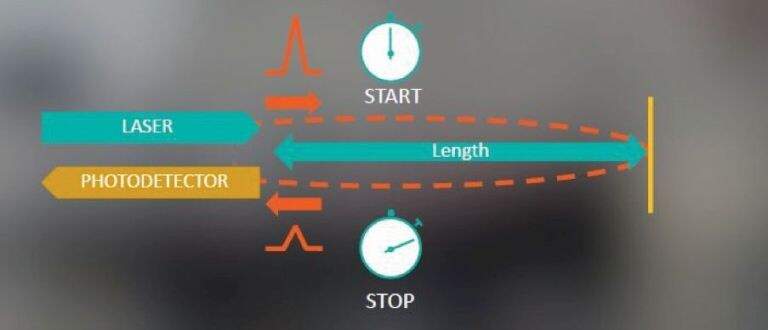
飛行時間(ToF)為此變得越來越重要。使用ToF技術(shù),光從調(diào)制源(例如激光)發(fā)射,然后由傳感器或相機捕獲從一個或多個物體反射的光束。因此,可以通過發(fā)射光...
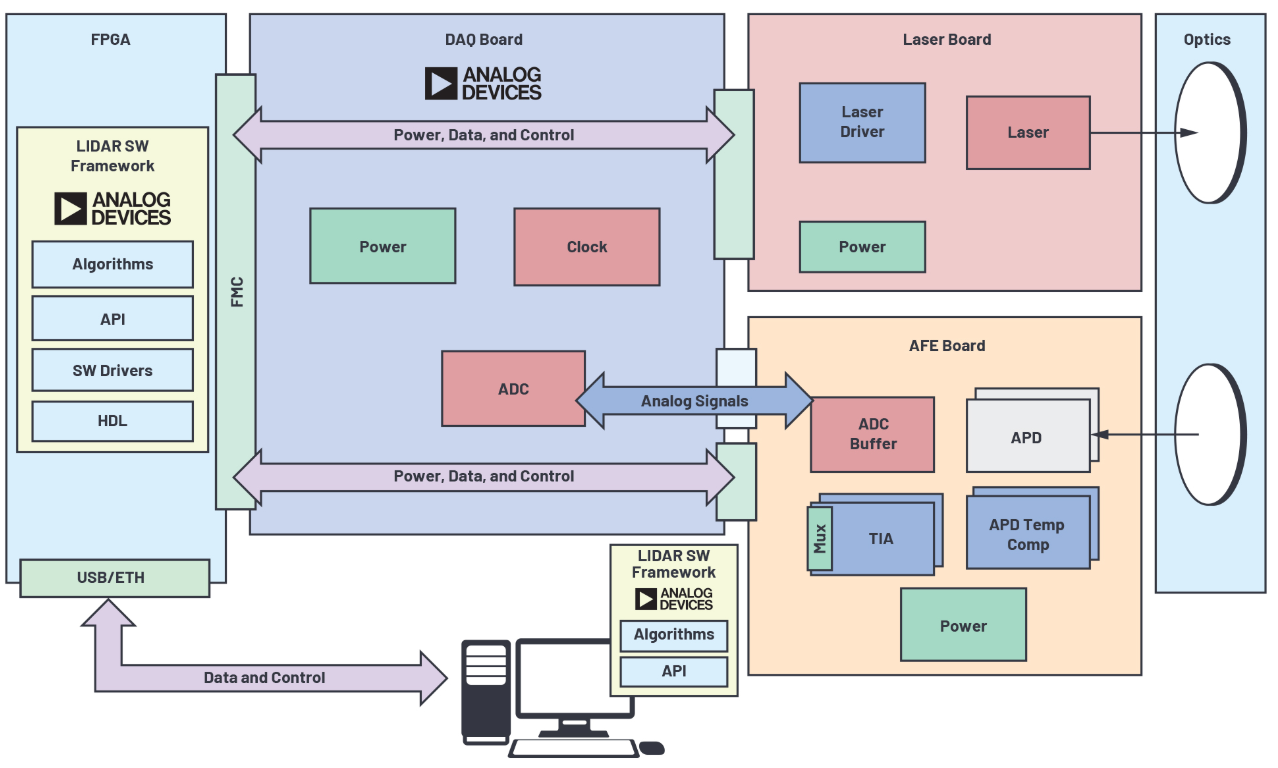
內(nèi)核中使用的軟件驅(qū)動器會啟動硬件組件,向用戶顯示所有可用功能。這些驅(qū)動器大部分都是工業(yè)I/O (IIO) Linux子系統(tǒng)的組成部分。

基于統(tǒng)一BEV表征的多任務(wù)多傳感器融合技術(shù)
Lidar-To-Camera: 將激光雷達點云投影到圖像上,使用2D CNN算法來完成數(shù)據(jù)處理。它會造成嚴重的幾何扭曲(如下圖a),影響3D Obje...
如果您正在設(shè)計自動駕駛汽車應(yīng)用,您就會知道 LiDAR(光檢測和測距)的重要性。LiDAR 是執(zhí)行自動駕駛汽車距離傳感的關(guān)鍵光學技術(shù),是高級駕駛輔助系統(tǒng)...
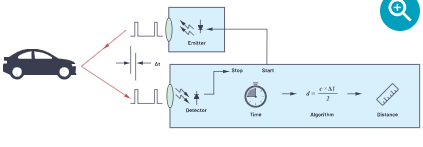
LiDAR會采用直接飛行時間 (dToF) 測量技術(shù),它計算發(fā)射信號與其返回回波之間的時間延遲,另一種方法是間接飛行時間 (iToF),這兩種方法都可以...
 換一批
換一批
編輯推薦廠商產(chǎn)品技術(shù)軟件/工具OS/語言教程專題
| 電機控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機 | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機 | PID | MOSFET | 傳感器 | 人工智能 | 物聯(lián)網(wǎng) | NXP | 賽靈思 |
| 步進電機 | SPWM | 充電樁 | IPM | 機器視覺 | 無人機 | 三菱電機 | ST |
| 伺服電機 | SVPWM | 光伏發(fā)電 | UPS | AR | 智能電網(wǎng) | 國民技術(shù) | Microchip |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關(guān)注我們的微信

下載發(fā)燒友APP

電子發(fā)燒友觀察

版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長沙市望城經(jīng)濟技術(shù)開發(fā)區(qū)航空路6號手機智能終端產(chǎn)業(yè)園2號廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號-1

