完善資料讓更多小伙伴認識你,還能領(lǐng)取20積分哦,立即完善>
標簽 > 通信
通信,指人與人或人與自然之間通過某種行為或媒介進行的信息交流與傳遞,從廣義上指需要信息的雙方或多方在不違背各自意愿的情況下采用任意方法,任意媒質(zhì),將信息從某方準確安全地傳送到另方
文章:4572個 瀏覽:137772次 帖子:596個

485modbus轉(zhuǎn)Profinet網(wǎng)關(guān)通信配置步驟與注意事項
485modbus轉(zhuǎn)Profinet網(wǎng)關(guān)(XD-MDPN100/200)是一種用于實現(xiàn)不同通信協(xié)議之間的數(shù)據(jù)傳輸?shù)脑O(shè)備。485modbus轉(zhuǎn)Profin...
2023-12-19 標簽:通信MODBUS網(wǎng)關(guān) 1157 0
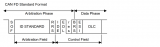
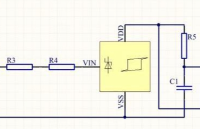
使用MM32F0160 FlexCAN-FD接口實現(xiàn)CAN FD通信
MM32F0160 系列 MCU 具有一個 FlexCAN 模塊,該模塊遵循 ISO 11898-1 標準、 CAN FD 和 CAN 2.0B 協(xié)議規(guī)...

微波濾波器是現(xiàn)代微波中繼通信、微波衛(wèi)星通信、電子對抗等系統(tǒng)必不可少的組成部分,同時也是最為重要、技術(shù)含量最高的微波無源器件之一,其性能的優(yōu)劣性往往直接影...

私有VLAN(cisco)和MUX VLAN(HUAWEI)
私有vlan是一種機制,將特定VLAN劃分成任意數(shù)量的不會相互重疊的二級VLAN(Secondary VLAN)。劃分過程對于外部網(wǎng)絡(luò)是不可見的,外部網(wǎng)...
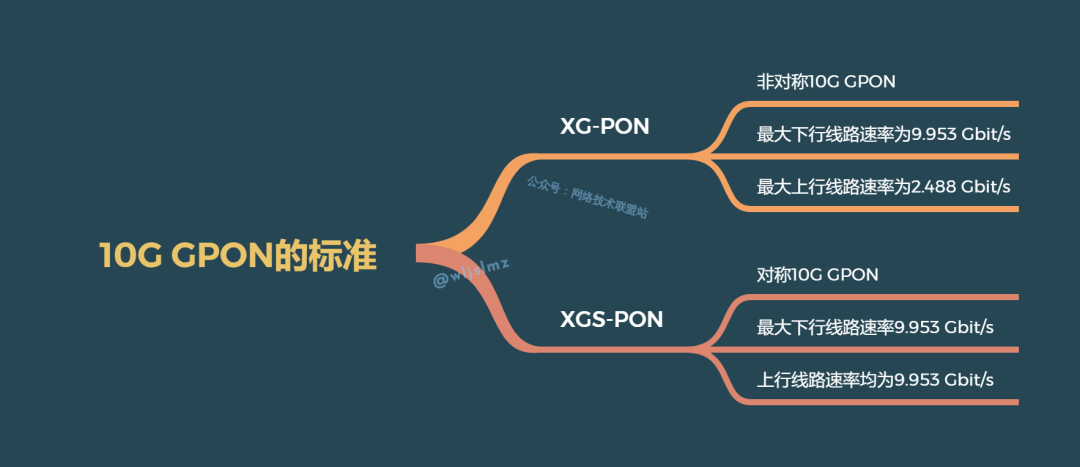
Passive Optical Network(PON)技術(shù)已經(jīng)成為Fiber-to-the-X(FTTx)網(wǎng)絡(luò)建設(shè)的主流技術(shù)之一。隨著用戶對高帶寬需求...
射頻信號發(fā)射距離的問題是一個非常復(fù)雜的話題,它受到許多因素的影響,包括天線性能、信號頻率、功率、環(huán)境噪聲以及障礙物的存在等等。本文將詳細討論這些因素,并...
2023-12-01 標簽:PCB通信無線局域網(wǎng) 1322 0

由于渦旋光束攜帶軌道角動量(OAM),因此被廣泛應(yīng)用于靈巧顯微操縱、超大容量光通信、超分辨率顯微鏡、光學(xué)渦旋日冕觀測儀和光學(xué)測量等領(lǐng)域。然而,普通渦旋光...

帶寬在不同的領(lǐng)域有不同的定義,通信領(lǐng)域,我們通常指的是信號帶寬、信道帶寬(單位為HZ),而在計算機中帶寬,其實是數(shù)據(jù)的傳輸速率,單位是bit/s,這個區(qū)...

進程是操作系統(tǒng)的概念,每當我們執(zhí)行一個程序時,對于操作系統(tǒng)來講就創(chuàng)建了一個進程,在這個過程中,伴隨著資源的分配和釋放。可以認為進程是一個程序的一次執(zhí)行過程。
2023-11-29 標簽:通信Linux操作系統(tǒng) 951 0
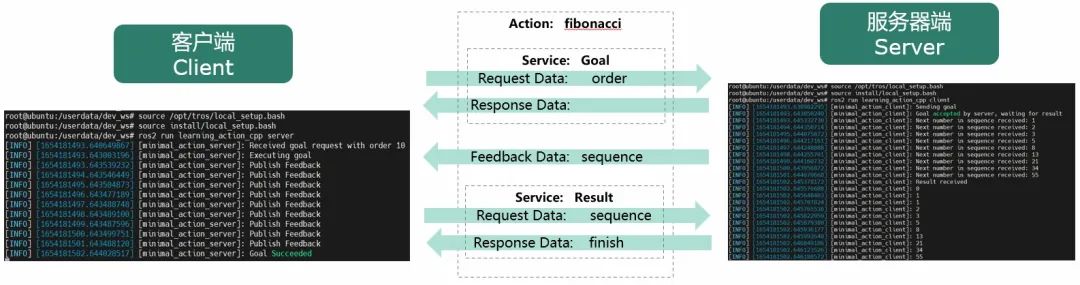
編程方法 相比之前話題和服務(wù)的程序,動作通信的例程相對較長,我們一起來運行并分析一下。 運行示例程序 $ source /opt/tros/local_...
編程開發(fā) 為了方便大家使用,TogetherROS針對零拷貝功能進行了封裝,風格類似ROS2中話題通信的接口,還是話題通信一樣的流程,我們只需要修改幾個...

智能機器人的功能繁多,全都放在一個計算機里,經(jīng)常會遇到計算能力不夠、處理出現(xiàn)卡頓等情況,如果可以將這些任務(wù)拆解,分配到多個計算機中運行豈不是可以減輕壓力...
2023-11-27 標簽:機器人通信分布式網(wǎng)絡(luò) 1161 0
網(wǎng)絡(luò)靜態(tài)ip和動態(tài)區(qū)別
網(wǎng)絡(luò)靜態(tài)IP和動態(tài)IP是指在網(wǎng)絡(luò)中分配給設(shè)備的唯一標識符,下面將詳細探討網(wǎng)絡(luò)靜態(tài)IP和動態(tài)IP的區(qū)別。 一、定義 靜態(tài)IP地址: 網(wǎng)絡(luò)靜態(tài)IP(Stat...

前面都是零零碎碎講的數(shù)據(jù)鏈的部分信息,接下來將以Link16為模版,介紹一個完整的數(shù)據(jù)鏈是怎樣的。
2023-11-27 標簽:通信Link數(shù)據(jù)鏈 2.3萬 0

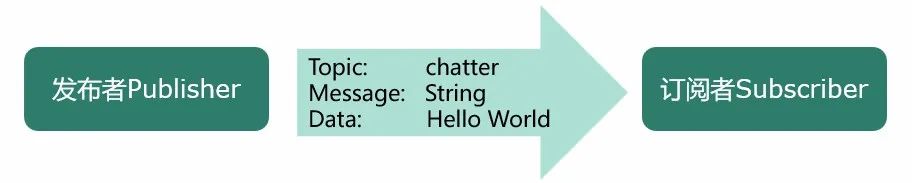
DDS編程示例 我們嘗試在代碼中配置DDS,以之前Hello World話題通信為例。 運行效果 啟動兩個終端,分別運行發(fā)布者和訂閱者節(jié)點: $ ros...
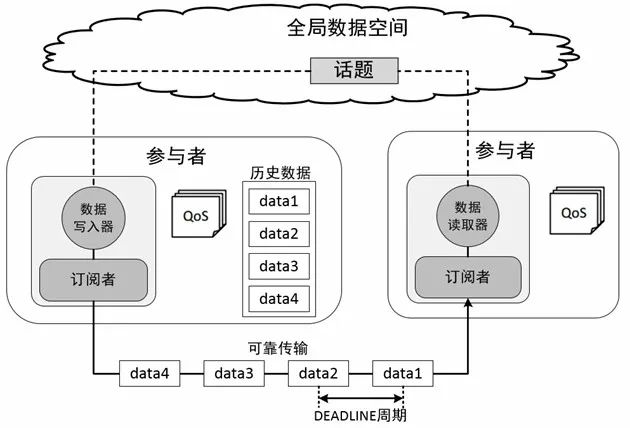
質(zhì)量服務(wù)策略QoS DDS為ROS的通信系統(tǒng)提供了哪些特性呢?我們通過這個通信模型圖來看下。 DDS中的基本結(jié)構(gòu)是Domain,Domain將各個應(yīng)用程...

DDS在ROS2中的應(yīng)用 DDS在ROS2系統(tǒng)中的位置至關(guān)重要,所有上層建設(shè)都建立在DDS之上。在這個ROS2的架構(gòu)圖中,藍色和紅色部分就是DDS。 剛...
Hello,大家好,歡迎來到《ROS2入門21講》,我是主講人古月。 終于講到ROS2中最為重大的變化——DDS,我們在前邊課程中學(xué)習的話題、服務(wù)、動作...
 換一批
換一批
編輯推薦廠商產(chǎn)品技術(shù)軟件/工具OS/語言教程專題
| 電機控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機 | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機 | PID | MOSFET | 傳感器 | 人工智能 | 物聯(lián)網(wǎng) | NXP | 賽靈思 |
| 步進電機 | SPWM | 充電樁 | IPM | 機器視覺 | 無人機 | 三菱電機 | ST |
| 伺服電機 | SVPWM | 光伏發(fā)電 | UPS | AR | 智能電網(wǎng) | 國民技術(shù) | Microchip |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關(guān)注我們的微信

下載發(fā)燒友APP

電子發(fā)燒友觀察

版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長沙市望城經(jīng)濟技術(shù)開發(fā)區(qū)航空路6號手機智能終端產(chǎn)業(yè)園2號廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號-1