完善資料讓更多小伙伴認(rèn)識你,還能領(lǐng)取20積分哦,立即完善>
標(biāo)簽 > 機(jī)器人
機(jī)器人(Robot)是自動執(zhí)行工作的機(jī)器裝置。它既可以接受人類指揮,又可以運(yùn)行預(yù)先編排的程序,也可以根據(jù)以人工智能技術(shù)制定的原則綱領(lǐng)行動。它的任務(wù)是協(xié)助或取代人類工作的工作,例如生產(chǎn)業(yè)、建筑業(yè),或是危險的工作。
文章:25657個 瀏覽:212557次 帖子:1482個
第五代無線技術(shù)將為新一代機(jī)器人的發(fā)展鋪平道路,讓未來機(jī)器人可以通過無線而非有線通信鏈路自由漫游,并利用云計算和數(shù)據(jù)存儲的海量資源。借助于這些功能,幾乎可...
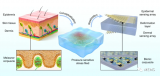
作為一種精巧而強(qiáng)大的觸覺器官,皮膚使人類能夠快速響應(yīng)并與周圍環(huán)境進(jìn)行精確交互。此外,由于皮膚具有柔軟且可拉伸的特性,它可以將復(fù)雜的外部接觸力轉(zhuǎn)化為自身的...
隨著聊天機(jī)器人在理解和響應(yīng)用戶問題方面越來越好,它可能會不斷進(jìn)化并成為主流。未來的聊天機(jī)器人可能會帶來豐富的會話用戶界面,使用戶可以自然地與計算機(jī)、智能...
工業(yè)機(jī)器人的分類可以根據(jù)不同的標(biāo)準(zhǔn)進(jìn)行,這里列舉了幾種常見的機(jī)器人分類方法。正確認(rèn)識工業(yè)機(jī)器人的基本類型和特點(diǎn),對于正確選型、規(guī)劃生產(chǎn)線以及實現(xiàn)自動化生...
2023-05-06 標(biāo)簽:機(jī)器人人工智能工業(yè)機(jī)器人 1773 0
貼片機(jī)相當(dāng)于一個自動化機(jī)器人,它的所有動作都是靠傳感器來傳輸后由主大腦來判斷下一步要做哪些操作

機(jī)器人節(jié)約能源選項之C4----SMARPAT的鎖屏
機(jī)器人節(jié)約能源選項之C4----SMARPAT的鎖屏。 隨便選一個可以帶鍵盤的 點(diǎn)擊文字 ,出現(xiàn)鍵盤。點(diǎn)擊WIN 選擇setting--》cont...

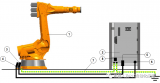
KUKA-C2機(jī)器人內(nèi)部結(jié)構(gòu)分析
TheKPS 600 的作用: ?主要的電源供應(yīng) ?開始回路的電源供應(yīng) ?剎車控制(主要6個軸的以及額外2個軸的) ?通過Interbus來控制...
2023-05-06 標(biāo)簽:機(jī)器人伺服控制器機(jī)器人控制器 2581 0

什么叫運(yùn)動控制?什么是伺服系統(tǒng)?伺服系統(tǒng)的三種控制方式
運(yùn)動控制在實際的工業(yè)現(xiàn)場中隨處可見,也常聽到大家提到運(yùn)動控制;那什么叫運(yùn)動控制?以及基本概念有哪些?下面我們?yōu)榇蠹易龊唵蔚慕榻B 運(yùn)動控制(MC)...
NVIDIA Isaac ROS Developer Preview 3,用于構(gòu)建高性能機(jī)器人應(yīng)用
團(tuán)隊去年與 Open Robotics 一起,在提供硬件加速器的計算平臺上加入了適應(yīng)和類型協(xié)商以提高 ROS 的性能。他們還實現(xiàn)了用于 Isaac RO...
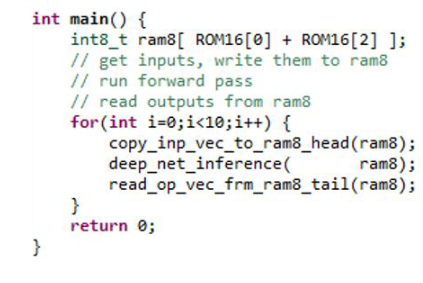
第二個解決了機(jī)器學(xué)習(xí) (ML) 固有的問題:ML 解決方案在一段時間后會過時,需要定期恢復(fù)活力。我們提出了一種 DNN-ON-FPGA 設(shè)計,可確保 D...
2023-05-06 標(biāo)簽:fpga機(jī)器人機(jī)器學(xué)習(xí) 1218 0

通常我們在控制小車運(yùn)動的時候不知道如何精確的對小車軌跡進(jìn)行控制。在不懂得小車控制算法精髓的時候,我們是無法對小車進(jìn)行精確的控制的。目前絕大多數(shù)小車都是用...
2023-05-06 標(biāo)簽:控制系統(tǒng)機(jī)器人直流電機(jī) 2029 0
剛?cè)犭娐?Rigid-Flex Printed Circuit Board可以簡稱為Rigid-Flex,是單一電路板上既包含剛性基板也包含柔性電路的一...

機(jī)器視覺工業(yè)生產(chǎn)中的5大典型應(yīng)用
在機(jī)器視覺應(yīng)用環(huán)節(jié)中,物體分揀應(yīng)用是建立在識別、檢測之后的一個環(huán)節(jié),通過機(jī)器視覺系統(tǒng)將圖像進(jìn)行處理,結(jié)合機(jī)械臂的使用實現(xiàn)產(chǎn)品分揀。舉個例子,在過去的產(chǎn)線...

從FOLGEN程序中如何實現(xiàn)自動回到CELL程序/開始執(zhí)行FOLGEN程序
IF($OUT[PF0]AND VW_CALL_CELL AND ( NOT $PRO_MOVE) AND ($MODE_OP==#EX))THEN機(jī)器...

KUKAC4機(jī)器人焊鉗拉拽程序分析sg_fehler ()w
GLOBALINTERRUPTDECL 8 WHEN $softplcbool[5] DO SZIntR(7)中斷程序激活滯后故障,$softplcbo...
安全邏輯電路 ESC (Electronic Safety Circuit ,電子安全回路)是一種雙信道、支持中央處理器的安全系統(tǒng)。它可對所有連接上的、...
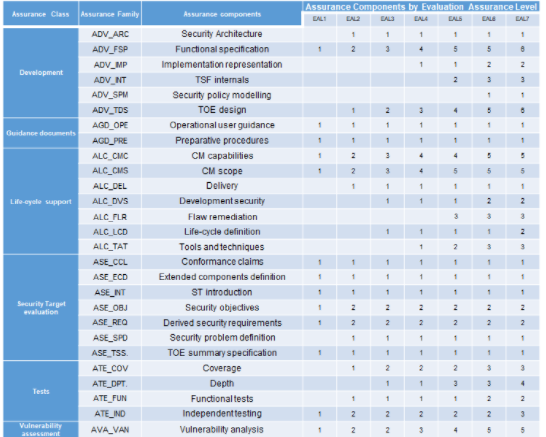
為什么通用標(biāo)準(zhǔn)安全認(rèn)證有用,EAL級別是什么意思
信息安全是我們這個時代最重要的話題之一。有一件事是肯定的:總會有攻擊者試圖利用軟件中的漏洞來濫用它。我們目前正在經(jīng)歷網(wǎng)絡(luò)攻擊數(shù)量的快速增長。惡意行為者 ...
2023-05-04 標(biāo)簽:機(jī)器人操作系統(tǒng)應(yīng)用程序 6465 0

KUKA機(jī)器人RESUME取消中斷事務(wù) V4.25
在子程序的最后一行前使用RESUME語句停止提前運(yùn)行是重要的。只有這樣才可能確保當(dāng)RESUME語句被激活時,提前運(yùn)行指針不在中斷被聲明的級別。在MOVE...

結(jié)束測量信號,這個測量信號是機(jī)器人給杜爾系統(tǒng)的,對涂膠量進(jìn)行測量。模擬出一個完整的信號來完成機(jī)器人和涂膠系統(tǒng)控制器之間的轉(zhuǎn)換,選擇后可以使涂膠系統(tǒng)結(jié)束對...

VASS機(jī)器人使用CMT焊接的標(biāo)準(zhǔn)控制應(yīng)用分析V4.24
焊接開始,焊槍伺服電機(jī)驅(qū)動,焊絲與板材電弧引燃,焊絲融化融滴滴進(jìn)熔池,當(dāng)數(shù)字化的控制監(jiān)測到一個短路信號,就會反饋給送絲機(jī),送絲機(jī)作出回應(yīng),迅速回抽焊絲,...
 換一批
換一批
編輯推薦廠商產(chǎn)品技術(shù)軟件/工具OS/語言教程專題
| 電機(jī)控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機(jī) | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機(jī) | PID | MOSFET | 傳感器 | 人工智能 | 物聯(lián)網(wǎng) | NXP | 賽靈思 |
| 步進(jìn)電機(jī) | SPWM | 充電樁 | IPM | 機(jī)器視覺 | 無人機(jī) | 三菱電機(jī) | ST |
| 伺服電機(jī) | SVPWM | 光伏發(fā)電 | UPS | AR | 智能電網(wǎng) | 國民技術(shù) | Microchip |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關(guān)注我們的微信

下載發(fā)燒友APP

電子發(fā)燒友觀察

版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長沙市望城經(jīng)濟(jì)技術(shù)開發(fā)區(qū)航空路6號手機(jī)智能終端產(chǎn)業(yè)園2號廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號-1


