完善資料讓更多小伙伴認(rèn)識你,還能領(lǐng)取20積分哦,立即完善>
標(biāo)簽 > 控制器
控制器(英文名稱:controller)是指按照預(yù)定順序改變主電路或控制電路的接線和改變電路中電阻值來控制電動機的啟動、調(diào)速、制動和反向的主令裝置。由程序計數(shù)器、指令寄存器、指令譯碼器、時序產(chǎn)生器和操作控制器組成,它是發(fā)布命令的“決策機構(gòu)”,即完成協(xié)調(diào)和指揮整個計算機系統(tǒng)的操作。
文章:11196個 瀏覽:184741次 帖子:4308個
一個好的可編程邏輯控制器PLC程序員都應(yīng)知道的7個編程技巧
優(yōu)秀的可編程邏輯控制器(PLC)程序員,在編寫代碼時應(yīng)始終為用戶著想,努力為其編寫最適合實際情況的代碼。

儲能變流器PCS由 DC/AC 雙向變流器、控制單元等構(gòu)成。根據(jù)功率指令的符號及大小控制變流器對電池進(jìn)行充電或放電,實現(xiàn)對電網(wǎng)有功功率及無功功率的調(diào)節(jié)。...
如果機器人違反了監(jiān)控功能并被安全控制器停止,則只能在 CRR 模式下將其移出違反區(qū)域。CRR 模式下的運動速度對應(yīng)于安全配置中定義的 T1 模式下安全降...
可編程邏輯控制器(PLC)是許多生產(chǎn)制造運營的基礎(chǔ),可以執(zhí)行很多任務(wù)。雖然PLC非常重要,但控制器內(nèi)部的編程也同樣重要,而且很容易被忽視。

PLC的本質(zhì)就是單片機,在單片機的基礎(chǔ)上添加一些外圍電路并形成產(chǎn)品化,即構(gòu)成了PLC控制器。
已知伺服驅(qū)動器Pm=10000Pulse/r,PLC控制器發(fā)出的頻率f (puls/s),如何計算負(fù)載軸的轉(zhuǎn)速n(r/s),

上位機實戰(zhàn)應(yīng)用之Modbus通信是什么
我一直認(rèn)為Modbus協(xié)議的存在有它的歷史意義,也就是說即使沒有Modbus,也可能會出一個ABUS、DBUS之類的協(xié)議,因為控制器與控制器之間通信,一...
2023-02-22 標(biāo)簽:控制器ModBus協(xié)議ABUS 1588 0
第二種相位滯后的情況如圖 ,節(jié)點從總線的邊沿跳變中,檢測到它的時序比總線的時序相對滯后 2Tq,這時控制器在前一個位時序中的 PBS2 段減少 2Tq ...
2023-02-22 標(biāo)簽:控制器差分信號局域網(wǎng)絡(luò) 979 0
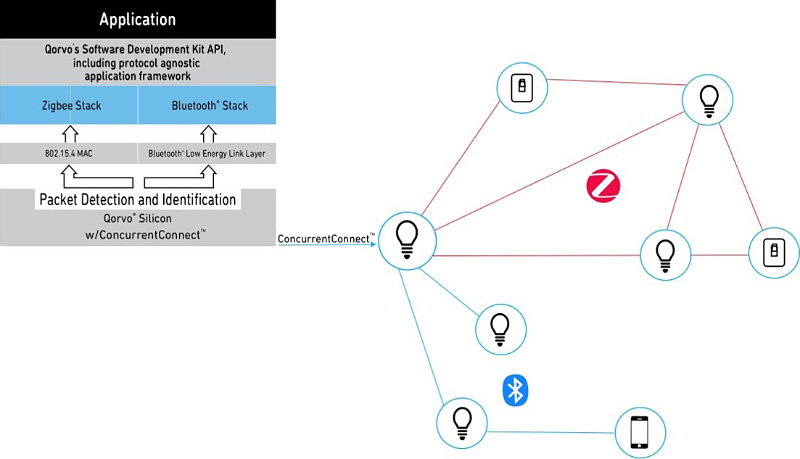
利用Bluetooth Mesh和Qorvo QPG6100開發(fā)照明控制方案
Bluetooth Mesh 協(xié)議使用 2.4 - 2.485 GHz 的低功率微波,由 Bluetooth Special Interest Grou...
導(dǎo)讀:本期對基于SVPWM的永磁同步電機直接轉(zhuǎn)矩控制進(jìn)行全面的分析和仿真搭建。之后與傳統(tǒng)的DTC進(jìn)行比較,凸顯基于SVPWM改進(jìn)的DTC方法的有效性。
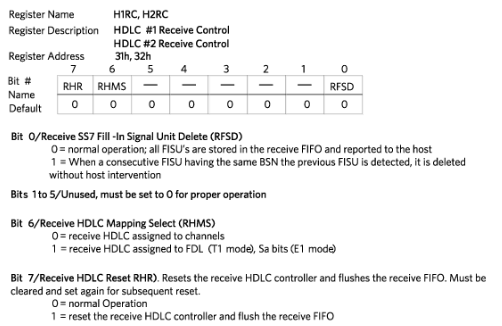
本應(yīng)用筆記詳細(xì)介紹了如何處理DS2155中的性能報告消息(PRM)以及如何處理 通過 T1 設(shè)施數(shù)據(jù)鏈路 (FDL) 以 HDLC 消息的形式發(fā)送或接收...
如何使用CAN引導(dǎo)加載程序在MAXQ7665A中加載用戶應(yīng)用代碼
CAN引導(dǎo)加載程序可通過CAN接口對MAXQ7665A微控制器進(jìn)行編程。引導(dǎo)加載程序還可幫助設(shè)計人員更新/修改已在現(xiàn)場部署的產(chǎn)品的用戶應(yīng)用程序代碼。
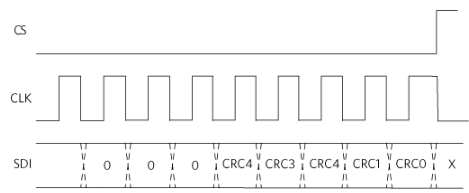
MAX14915八通道、工業(yè)、高邊開關(guān)CRC編程指南
MAX14915為高性能、8通道、工業(yè)高邊開關(guān),具有豐富、先進(jìn)的功能集。SPI接口允許微控制器監(jiān)視和控制MAX14915的大部分方面。
介紹DDR3和DDR4最關(guān)鍵的一些技術(shù)
Write leveling功能和Fly_by拓?fù)涿懿豢煞帧ly_by拓?fù)渲饕獞?yīng)用于時鐘、地址、命令和控制信號,該拓?fù)淇梢杂行У臏p少stub的數(shù)量和他們的長度
MAXQ2000通過專用的LCD控制器外設(shè)輕松直接地與LCD顯示器接口。使用MAXQ2000提供的靈活端口引腳配置,可以直接讀取多路復(fù)用鍵盤。中斷驅(qū)動的...
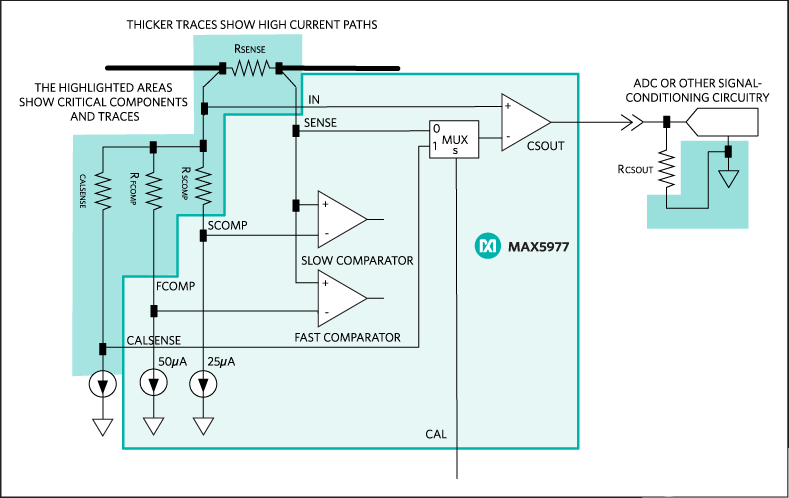
MAX5977A為多功能、高性能熱插拔控制器,具有電子保險絲和高邊電流檢測輸出。正確的元件放置和布線對于實現(xiàn)MAX5977的全部性能至關(guān)重要。在這里,我...
TDK推出新款HVC 5x系列可編程片上系統(tǒng)(SOC)電機控制器
繼HVC 4x系列之后,TDK公司推出兩款HVC 5x系列產(chǎn)品,進(jìn)一步豐富了其智能執(zhí)行器的電機控制解決方案,并聚焦于電動和混合動力汽車的熱管理系統(tǒng)。HV...
EtherCAT控制器在多通道視覺飛拍與多點精準(zhǔn)輸出上的應(yīng)用
ZMC408CE是正運動推出的一款多軸高性能EtherCAT總線運動控制器,具有EtherCAT、EtherNET、RS232、CAN和U盤等通訊接口,...
分立SIC器件在電驅(qū)系統(tǒng)中的應(yīng)用
更高的效率,省電池,省電費 碳化硅控制器具有更高的能量轉(zhuǎn)換效率,在不同的應(yīng)用工況下可使能耗降低3%~6% -同樣的電池容量,增加續(xù)航里程 -同樣的...
用FX3U、FX2N、FX2NC、FX1N,F(xiàn)X0N可編程控制器進(jìn)行的數(shù)據(jù)傳輸可建立在N:N的基礎(chǔ)上。使用此網(wǎng)絡(luò)通訊,他們能鏈接一個小規(guī)模系統(tǒng)中的數(shù)據(jù)。
 換一批
換一批
編輯推薦廠商產(chǎn)品技術(shù)軟件/工具OS/語言教程專題
| 電機控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機 | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機 | PID | MOSFET | 傳感器 | 人工智能 | 物聯(lián)網(wǎng) | NXP | 賽靈思 |
| 步進(jìn)電機 | SPWM | 充電樁 | IPM | 機器視覺 | 無人機 | 三菱電機 | ST |
| 伺服電機 | SVPWM | 光伏發(fā)電 | UPS | AR | 智能電網(wǎng) | 國民技術(shù) | Microchip |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關(guān)注我們的微信

下載發(fā)燒友APP

電子發(fā)燒友觀察

版權(quán)所有 ? 湖南華秋數(shù)字科技有限公司
長沙市望城經(jīng)濟技術(shù)開發(fā)區(qū)航空路6號手機智能終端產(chǎn)業(yè)園2號廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號-1


