完善資料讓更多小伙伴認識你,還能領取20積分哦,立即完善>
標簽 > 伺服控制
伺服控制是為滿足某種目的,產(chǎn)生運動和對物體運動進行控制是我們人類最重要的活動之一。伺服控制是對物體運動的位置、速度及加速度等變化量的有效控制。所謂伺服控制指對物體運動的位置、速度及加速度等變化量的有效控制。這種控制已在各領域得到普及。
文章:94個 瀏覽:20932次 帖子:35個
位置控制模式一般是通過外部輸入的脈沖的頻率來確定轉動速度的大小,通過脈沖的個數(shù)來確定轉動的角度,也有些伺服可以通過通訊方式直接對速度和位移進行賦值。
無論是同步輪結構還是齒輪齒條結構,都存在加工精度誤差。運動控制卡(PLC)并沒有設置準確的脈沖當量。例如上一批同步輪電機旋轉一圈設備前進10mm,這批同...
說明:FB塊包含16個點位的定位 手自動,以及16個點位的定位完成信號,每個點位有單獨的位置和速度 JOG也有單獨的速度 觸摸屏的使能 JOG 原...
在伺服控制系統(tǒng)設計或是伺服電機的選型過程中,常常需要考慮慣量問題,慣量是影響伺服系統(tǒng)響應速度和穩(wěn)定性的重要因素。總的來說,是希望系統(tǒng)的總體慣量越小越好,...
2022-09-13 標簽:伺服電機伺服系統(tǒng)伺服控制 8251 0
在選用時要注意,交流伺服電動機的速度是可調節(jié)的,且在相當大的轉速范圍內電動機輸出的轉矩是恒定的,故選用電動機時只要電動機的額定轉速大于各軸所需的最高轉速就行。
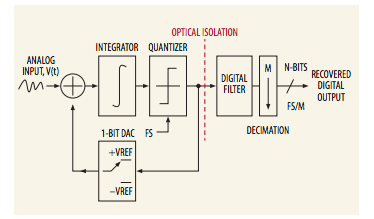
在工業(yè)電機或伺服控制應用中,準確的電流測量是控制回路的關鍵部分。電流測量不僅需要盡可能準確,而且還需要安全可靠。工業(yè)電機或伺服控制系統(tǒng)通常包含高壓,并且...
工業(yè)機器人的使用越來越廣泛,即使是普通群眾,對工業(yè)機器人也愈來愈了解。就普通人而言,對工業(yè)機器人的認識大多停留在感性認識層面,對工業(yè)機器人的相關技術卻未...
力矩控制模式,電機電流大小受控,速度不受控,負載力矩小時,速度就快,反之,負載力矩大時,速度就慢,速度的大小處于被動變化,而電流、力矩是主動變化;
如果對位置和速度有一定的精度要求,而對實時轉矩不是很關心,用速度或位置模式比較好。如果上位控制器有比較好的閉環(huán)控制功能,用速度控制效果會好一點。如果本身...
所謂定位,就是要讓伺服電機走到一個確定的位置。這個位置可以是增量式的,也可以是絕對式的。打個比方,我們現(xiàn)在在路上,我們要往前走10米,相當于我們的位置要...

三菱FX3U定位控制和伺服應用技術的詳細介紹和原點回歸指令說明
通過PLC給伺服驅動器發(fā)驅動脈沖,通過改變脈沖頻率來控制移動速度,通過改變脈沖數(shù)量來改變移動量,控制步進電機移動方向。 伺服驅動器是執(zhí)行機構,在接收到...
再確定伺服的行走速度:(1).伺服電機額定轉速3000r/min(50Hz),即50r/s;(2).伺服電機額定發(fā)出的脈沖數(shù),50*2500=12500...
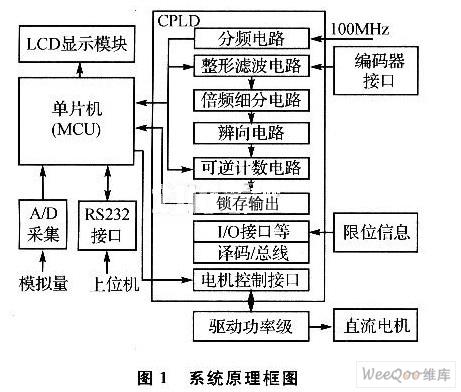
設計基于高速單片機C8051F120和CPLD的高精度大型望遠鏡的伺服控制器,由單片機實現(xiàn)閉環(huán)控制算法、上位機通信和LCD顯示控制,CPLD實現(xiàn)增量式編...
電液伺服控制技術作為連接現(xiàn)代微電子技術、計算機技術和液壓技術的橋梁,已經(jīng)成為現(xiàn)代控制技術的重要構成。由于它具有線性好、死區(qū)小、靈敏度高,動態(tài)性能好、響應...
2018-09-07 標簽:伺服控制TRT系統(tǒng) 1.8萬 0
一、數(shù)控銑床,打開電源和系統(tǒng),伺服電機嗡嗡響,響幾分鐘之后伺服電機會發(fā)熱,調小剛性后不響了,但銑出來的圓不像圓,該怎樣調? 應該是幾臺驅動器設置的增益...
TMC4671基于硬件FOC伺服電機控制芯片適應BLDC/PMSM等
全球領先的嵌入式運動控制公司德國TRINAMIC MOTION CONTROL 將于近期推出其最新的伺服控制芯片TMC4671。
伺服電機內部的轉子是永磁鐵,驅動器控制的U/V/W三相電形成電磁場,轉子在此磁場的作用下轉動,同時電機自帶的編碼器反饋信號給驅動器,驅動器根據(jù)反饋值與目...

以DSP和FPGA技術為基礎的伺服控制系統(tǒng)設計詳解
在大型光電跟蹤設備中由于跟蹤算法復雜,分系統(tǒng)眾多,要求伺服控制模塊不僅精度高、速度快、可靠性強,而且要有豐富的外圍總線接口。考慮可靠性,選用PCI04...
真的能在短時間內摸清一個行業(yè)嗎?這里為大家整理的行業(yè)產(chǎn)業(yè)鏈全景圖。一起來看一看吧!
運動控制起源于早期的伺服控制,本文與讀者分享的是運動控制的定義、運動控制系統(tǒng)的基本架構組成以及在運動控制方面幾項運動所需控制軌跡等
 換一批
換一批
編輯推薦廠商產(chǎn)品技術軟件/工具OS/語言教程專題
| 電機控制 | DSP | 氮化鎵 | 功率放大器 | ChatGPT | 自動駕駛 | TI | 瑞薩電子 |
| BLDC | PLC | 碳化硅 | 二極管 | OpenAI | 元宇宙 | 安森美 | ADI |
| 無刷電機 | FOC | IGBT | 逆變器 | 文心一言 | 5G | 英飛凌 | 羅姆 |
| 直流電機 | PID | MOSFET | 傳感器 | 人工智能 | 物聯(lián)網(wǎng) | NXP | 賽靈思 |
| 步進電機 | SPWM | 充電樁 | IPM | 機器視覺 | 無人機 | 三菱電機 | ST |
| 伺服電機 | SVPWM | 光伏發(fā)電 | UPS | AR | 智能電網(wǎng) | 國民技術 | Microchip |
| Arduino | BeagleBone | 樹莓派 | STM32 | MSP430 | EFM32 | ARM mbed | EDA |
| 示波器 | LPC | imx8 | PSoC | Altium Designer | Allegro | Mentor | Pads |
| OrCAD | Cadence | AutoCAD | 華秋DFM | Keil | MATLAB | MPLAB | Quartus |
| C++ | Java | Python | JavaScript | node.js | RISC-V | verilog | Tensorflow |
| Android | iOS | linux | RTOS | FreeRTOS | LiteOS | RT-THread | uCOS |
| DuerOS | Brillo | Windows11 | HarmonyOS |
關注我們的微信

下載發(fā)燒友APP

電子發(fā)燒友觀察

版權所有 ? 湖南華秋數(shù)字科技有限公司
長沙市望城經(jīng)濟技術開發(fā)區(qū)航空路6號手機智能終端產(chǎn)業(yè)園2號廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號-1

