 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
- 構(gòu)建一個(gè)基礎(chǔ)/MVP 機(jī)器人(本教程)
- 為基礎(chǔ)機(jī)器人添加爪/抓手(在此處找到爪教程)
- 添加距離傳感器(在此處找到距離傳感器教程)
- 為機(jī)器人添加攝像頭(在此處找到攝像頭教程)
由您決定要向機(jī)器人添加多少額外的小工具。無論您使用何種文檔,只要確保將正確的BluPants 映像文件閃存到您的 SD 卡即可。
零件(基本機(jī)器人)
基本機(jī)器人是可與 BluPants 一起使用的最小可行產(chǎn)品 (MVP)。它只會(huì)在所有方向上導(dǎo)航(前進(jìn)、后退、左轉(zhuǎn)和右轉(zhuǎn))。它是您將來用于構(gòu)建更復(fù)雜的機(jī)器人的基礎(chǔ)。
建議先組裝 MVP,然后隨著經(jīng)驗(yàn)的增加添加額外的功能(距離傳感器、抓爪、攝像頭、額外的伺服系統(tǒng)等)。
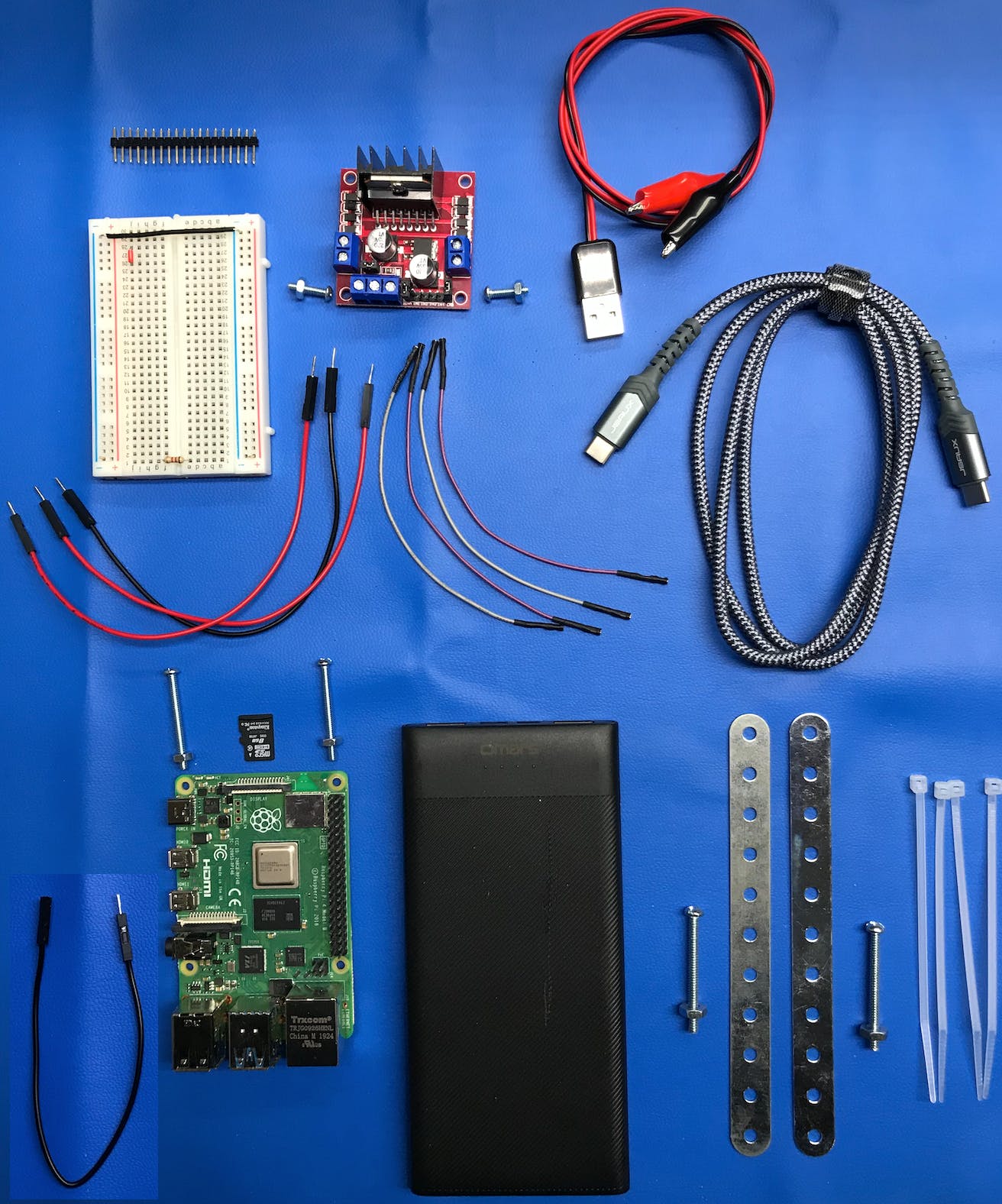
對于基本的 MVP 機(jī)器人,我們將需要以下部件:
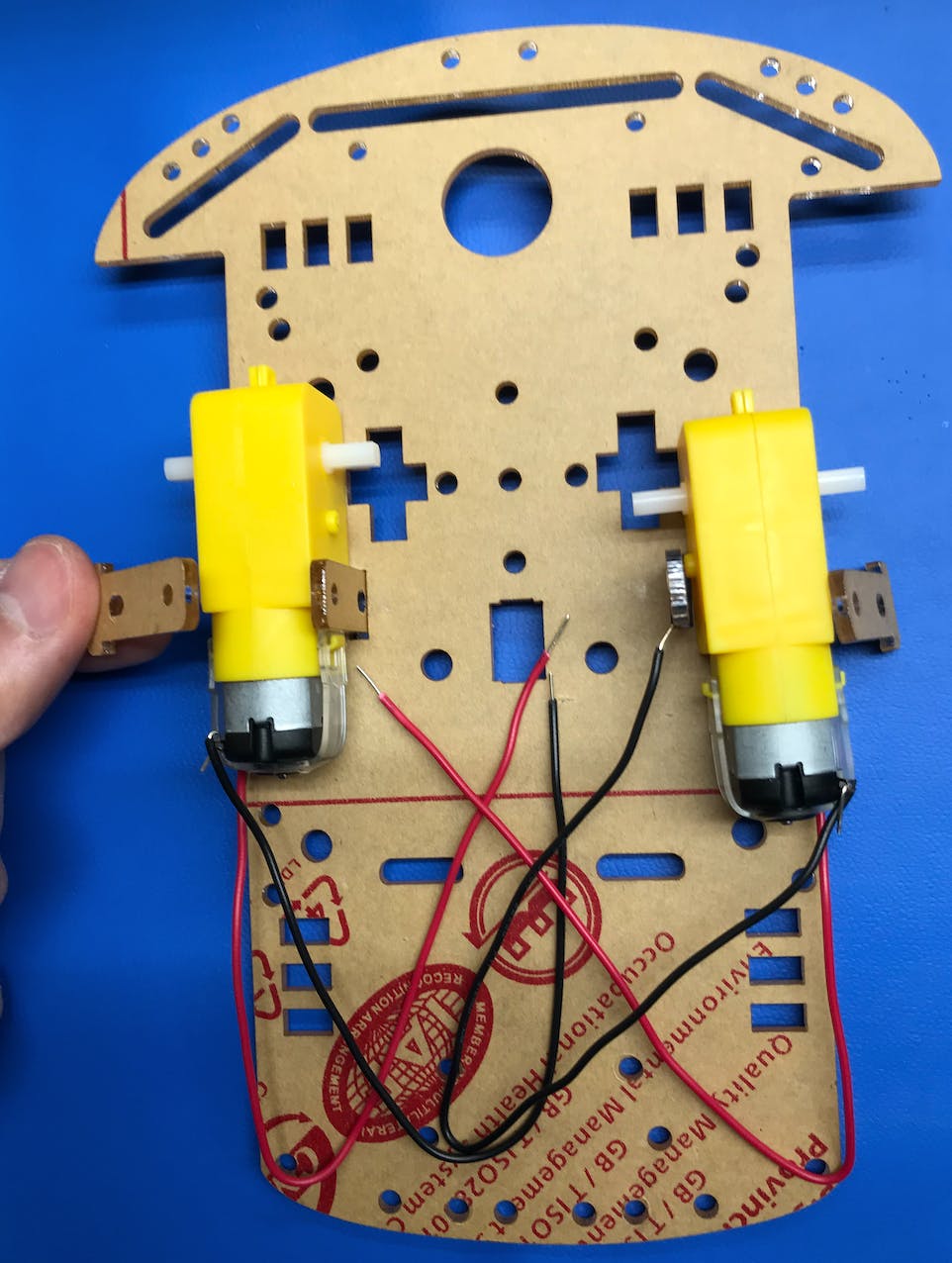
首先要做的是在焊接之前將電線連接到電機(jī)。確保電線和電機(jī)之間有良好的物理連接。
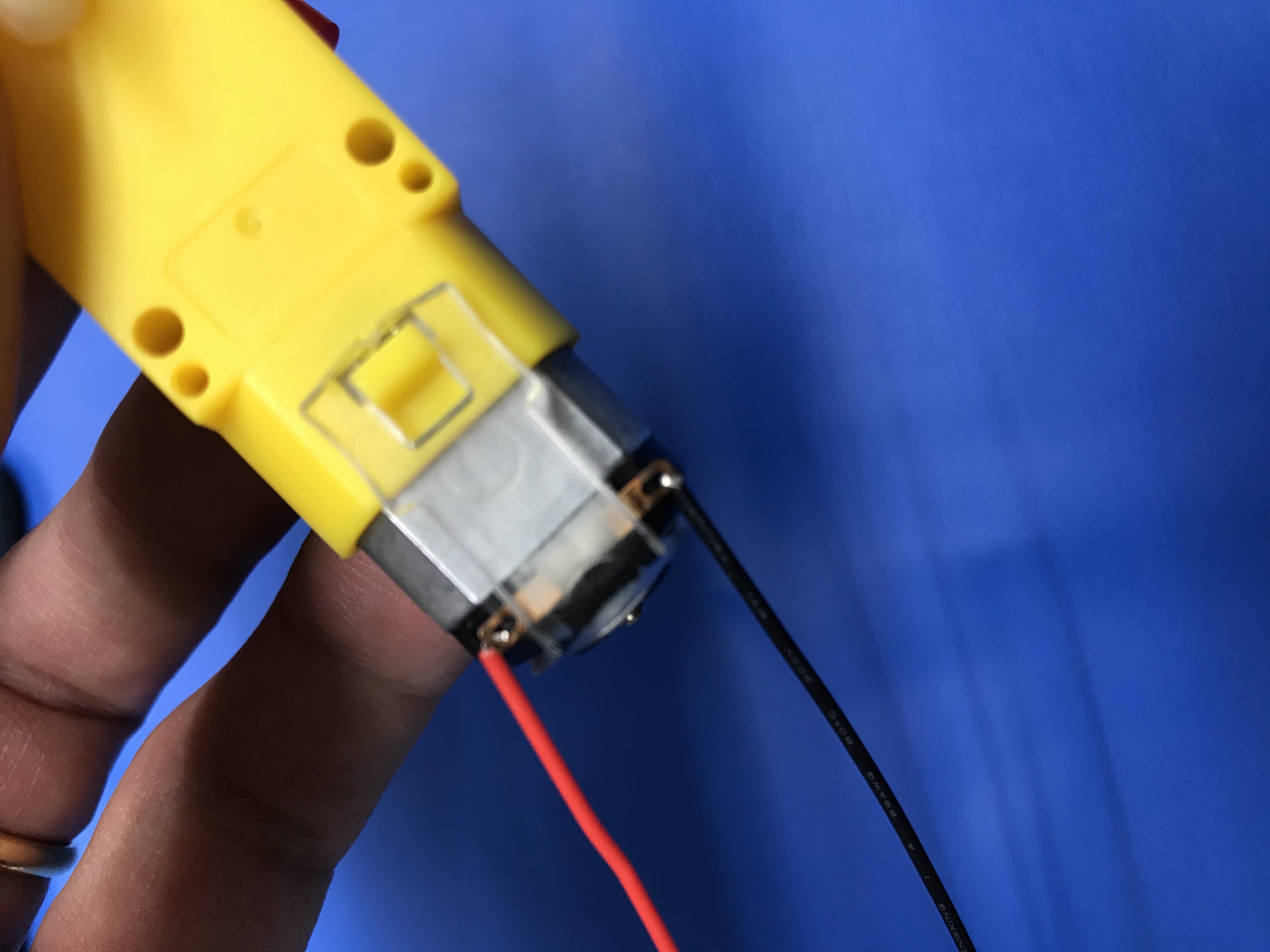
您可能需要使用電壓表或?qū)?AA 電池連接到電線末端,以測試您是否有良好的物理連接。之后,您可能需要焊接它。
拿到底盤,把它放在電機(jī)的頂部,按照我們目前桌子上的設(shè)置:
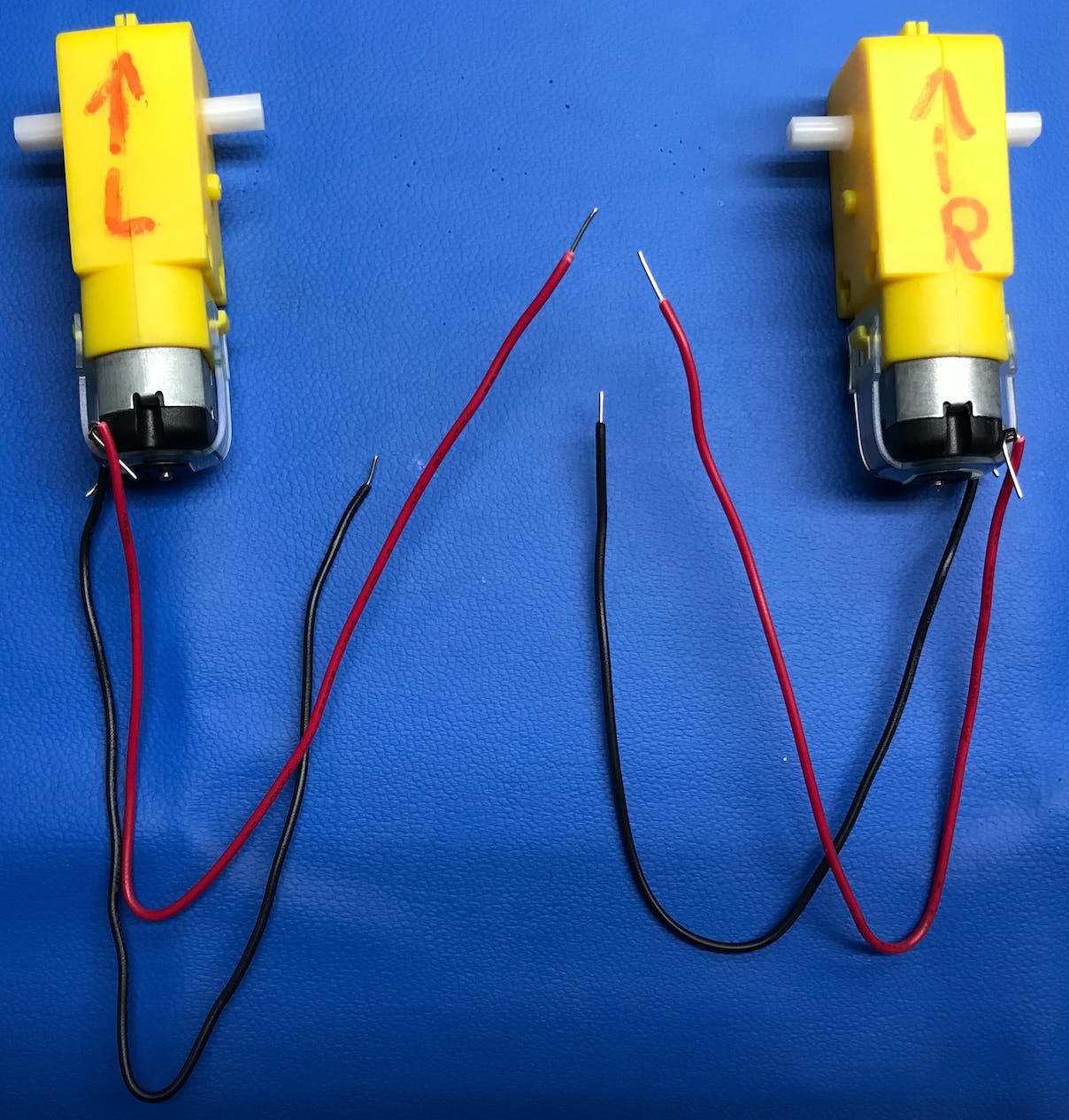
將電機(jī)固定在底盤上并將其翻轉(zhuǎn)。請注意,字母“L”和“R”將不再可見,因?yàn)榈妆P連接到電機(jī)的表面與我們寫字母的表面相同。
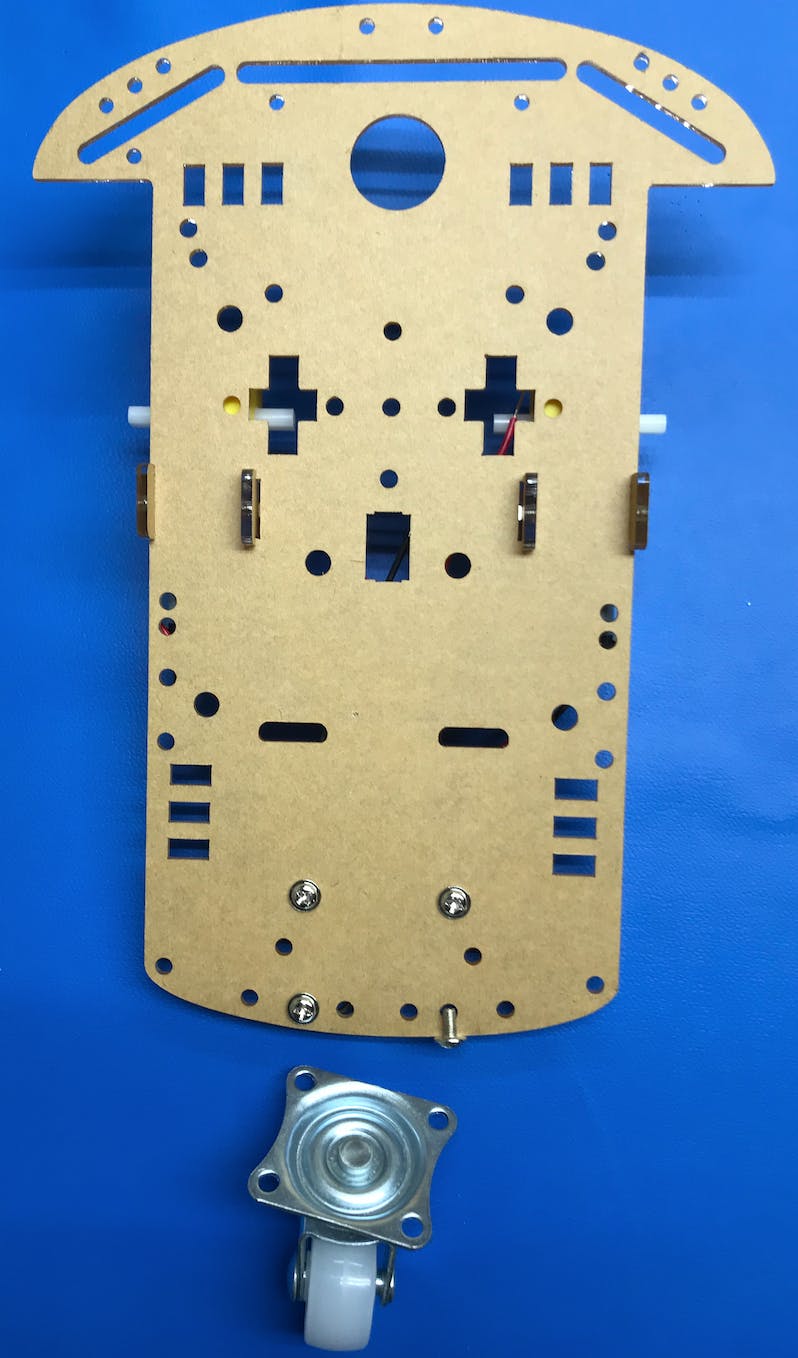
翻轉(zhuǎn)底盤后,將另外兩個(gè)外部緊固件靠近電機(jī)并使用螺栓固定。螺栓應(yīng)該從外到內(nèi)。螺母應(yīng)從機(jī)箱內(nèi)部安裝。
將旋轉(zhuǎn)輪安裝到底盤背面。
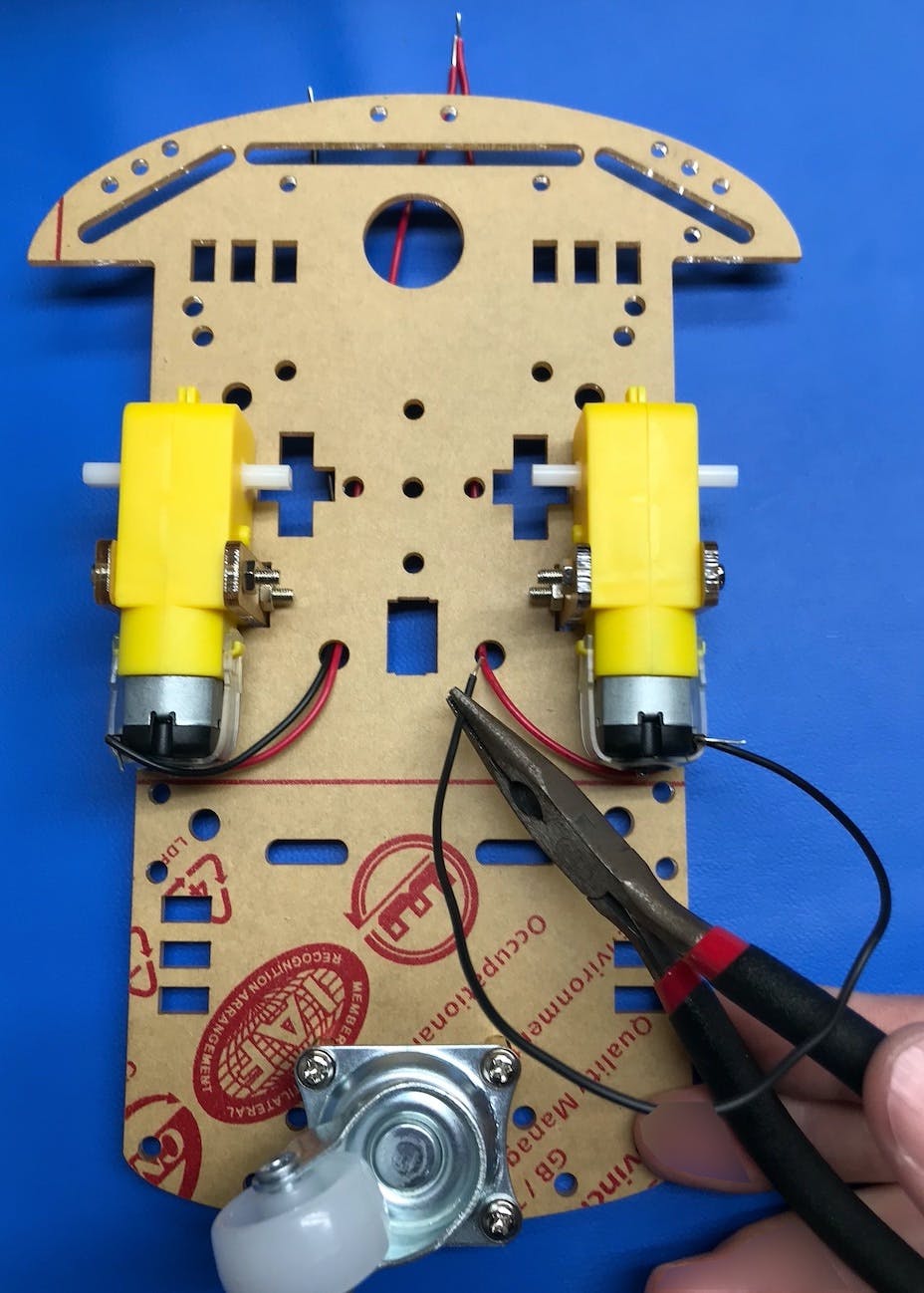
將電機(jī)線帶到底盤頂部并連接兩個(gè)電機(jī)輪。
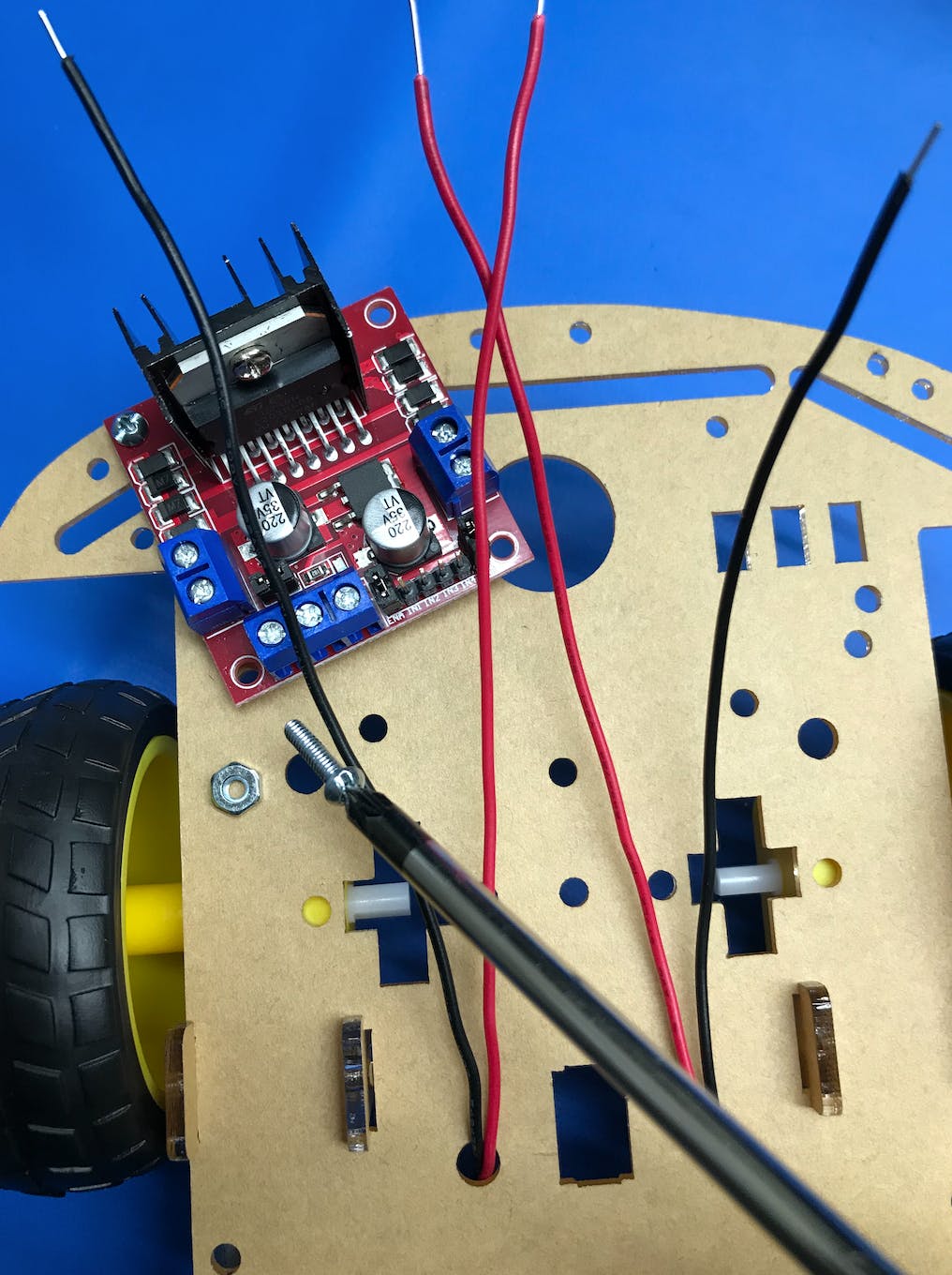
將 L298N 電機(jī)驅(qū)動(dòng)控制器固定在機(jī)箱頂部。圖片顯示 L298N 板固定在機(jī)箱左前方。后來,我意識(shí)到把它放在我的項(xiàng)目的右上角會(huì)更有意義(這樣我將來會(huì)有更多的空間來添加額外的設(shè)備,比如相機(jī)、距離傳感器等)。隨意將其放置在對您的項(xiàng)目更方便的任何地方。
電機(jī)極性
黑線和紅線與 L298N 控制器的連接將定義通電時(shí)電機(jī)是向前驅(qū)動(dòng)還是向后驅(qū)動(dòng)(極性)。如果您的任何車輪向錯(cuò)誤的方向旋轉(zhuǎn),請交換 L298N 控制器上的黑色和紅色線位置,并重復(fù)本節(jié)中描述的所有步驟。
將左側(cè)電機(jī)線連接到 L298N 控制器左側(cè)的連接器,將右側(cè)電機(jī)線連接到右側(cè),如圖所示。左側(cè)電機(jī)線應(yīng)連接到 MOTOR A(OUT1 和 OUT2),右側(cè)電機(jī)線應(yīng)連接到 MOTOR B(OUT3 和 OUT4)
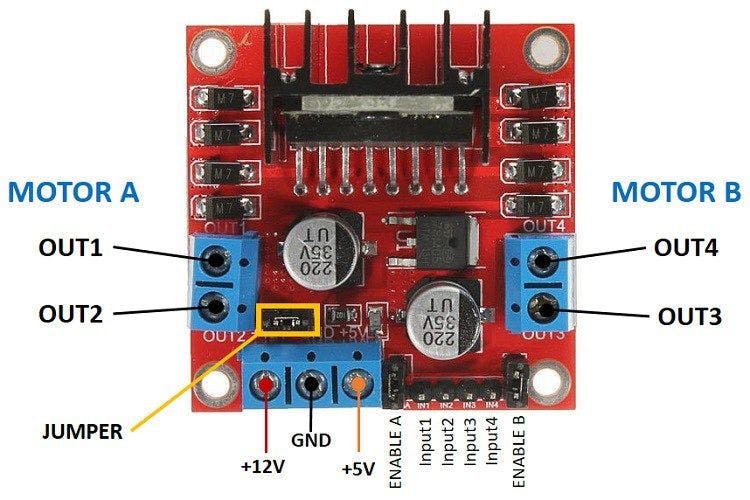
在我們的例子中,我們將左側(cè)電機(jī)的黑線連接到 OUT 1,將左側(cè)電機(jī)的紅線連接到 OUT2。右側(cè)電機(jī)的紅線連接到 OUT3,右側(cè)電機(jī)的黑線連接到 OUT4。
你的可能不一樣。完成整個(gè)組裝后,嘗試對機(jī)器人進(jìn)行編碼以繼續(xù)前進(jìn)。假設(shè)您注意到您的左側(cè)電機(jī)正在以正確的方向運(yùn)行,但右側(cè)電機(jī)正在向后驅(qū)動(dòng)。在此示例中,機(jī)器人將順時(shí)針旋轉(zhuǎn)而不是向前移動(dòng)。在這種情況下,您應(yīng)該保持 OUT1 和 OUT2(左)不變,但交換 OUT3 和 OUT4(右)。嘗試更改設(shè)置,直到您的電機(jī)極性正確。
將 L298N 電機(jī)驅(qū)動(dòng)器控制器連接到您的 Raspberry Pi
本項(xiàng)目中使用的 L298N 板需要連接到樹莓派。其他板的連接方式可能不同,有些板可以簡單地作為 HAT 放置在 Raspberry Pi GPIO 引腳上。請務(wù)必查看您的電路板的文檔,看看是否是這種情況。
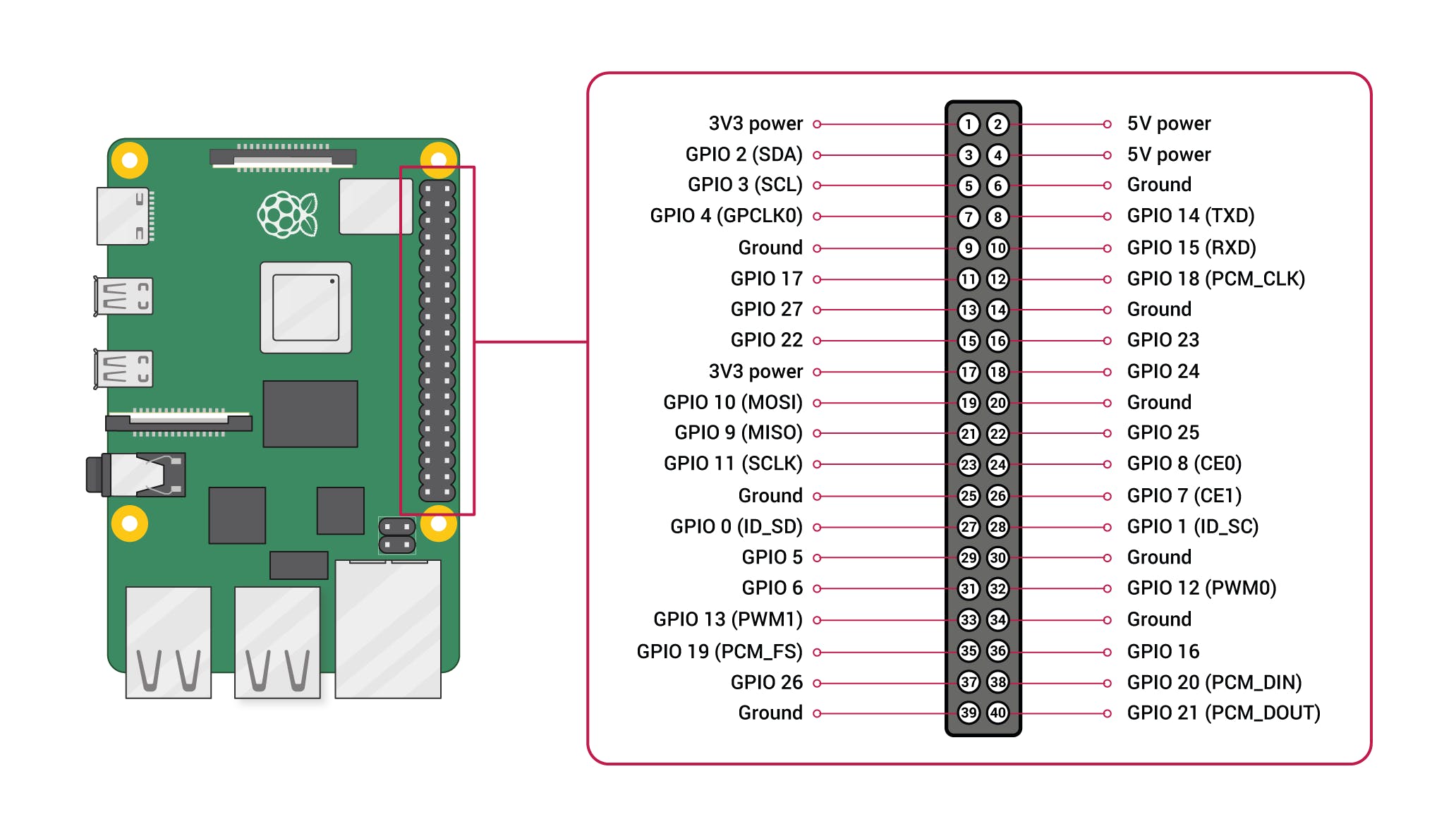
在這里使用的板上有標(biāo)記為In1 、In2 、In3和In4的引腳。您使用 Pi 上的哪些 GPIO 引腳取決于您;在這個(gè)項(xiàng)目中,已經(jīng)使用了GPIO 7 、8 、9和10 。如果您使用不同的 GPIO 引腳,您還需要更新blupants.json文件以反映您的選擇并重新啟動(dòng) blupants 服務(wù)。查看“調(diào)整”部分了解更多詳情。
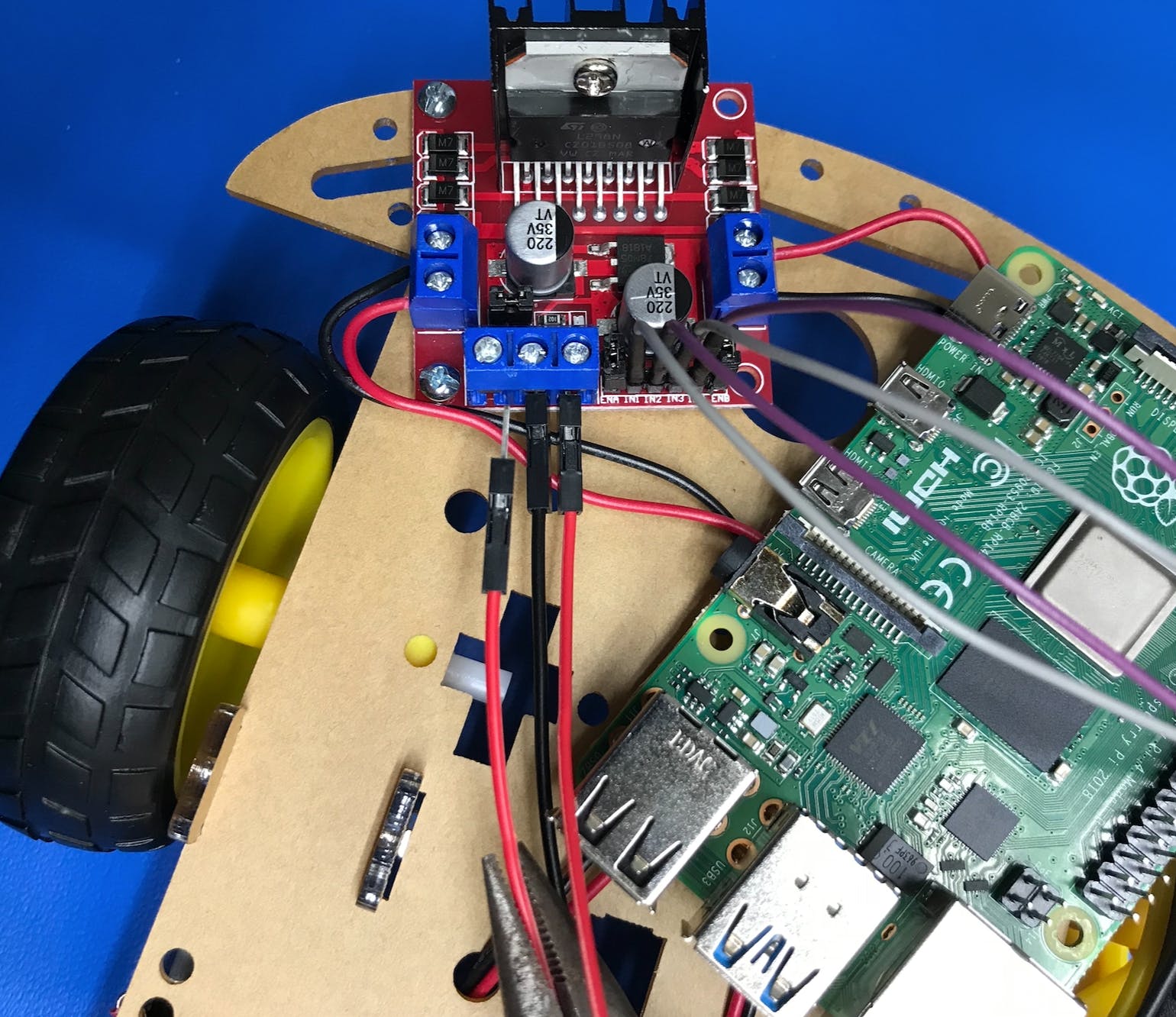
使用四個(gè)母對母跳線將 Raspberry Pi GPIO 引腳連接到電機(jī)控制器板上的引腳。
- GPIO pin7連接到In1
- GPIO pin8連接到In2
- GPIO pin9連接到In3
- GPIO pin10連接到In4
將 L298N 和 Raspberry Pi 連接到移動(dòng)電源
在該項(xiàng)目中,我們使用一個(gè)經(jīng)濟(jì)實(shí)惠的移動(dòng)電源為 Raspberry Pi 和 L298N 板以及電機(jī)供電。您可能想探索其他選項(xiàng),例如官方Raspberry Pi 項(xiàng)目頁面的“制作您自己的移動(dòng)電源”中顯示的選項(xiàng)。
在這個(gè)項(xiàng)目中,我們使用 2 條公對公紅色跳線和 1 條公對公黑色跳線。然后連接到 L298N 板上的 +12V、GND 和 +5V 端口,如下圖所示。
將紅色跳線連接到“+”電源軌,將黑色跳線連接到面包板上的“-”電源軌。
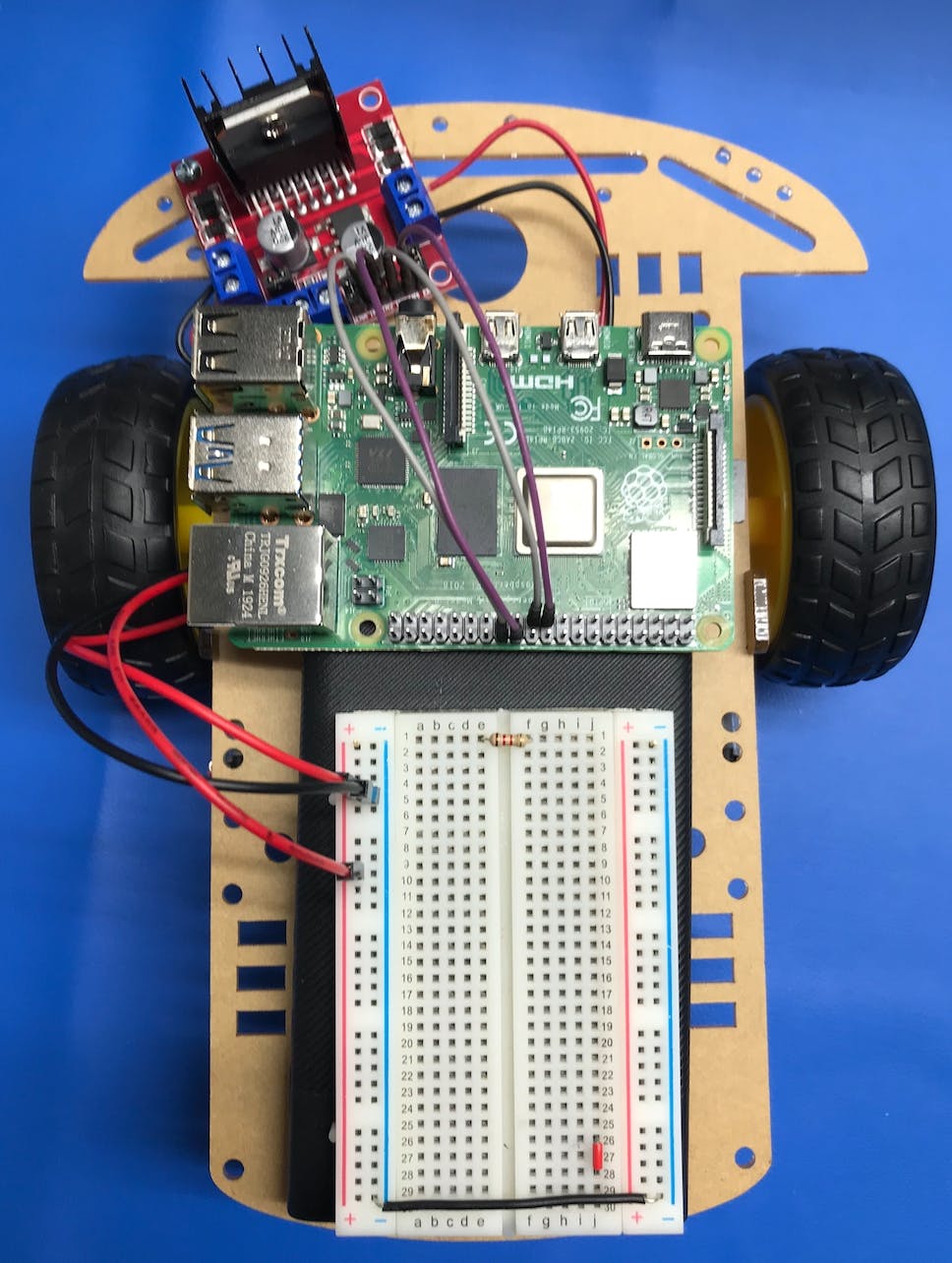
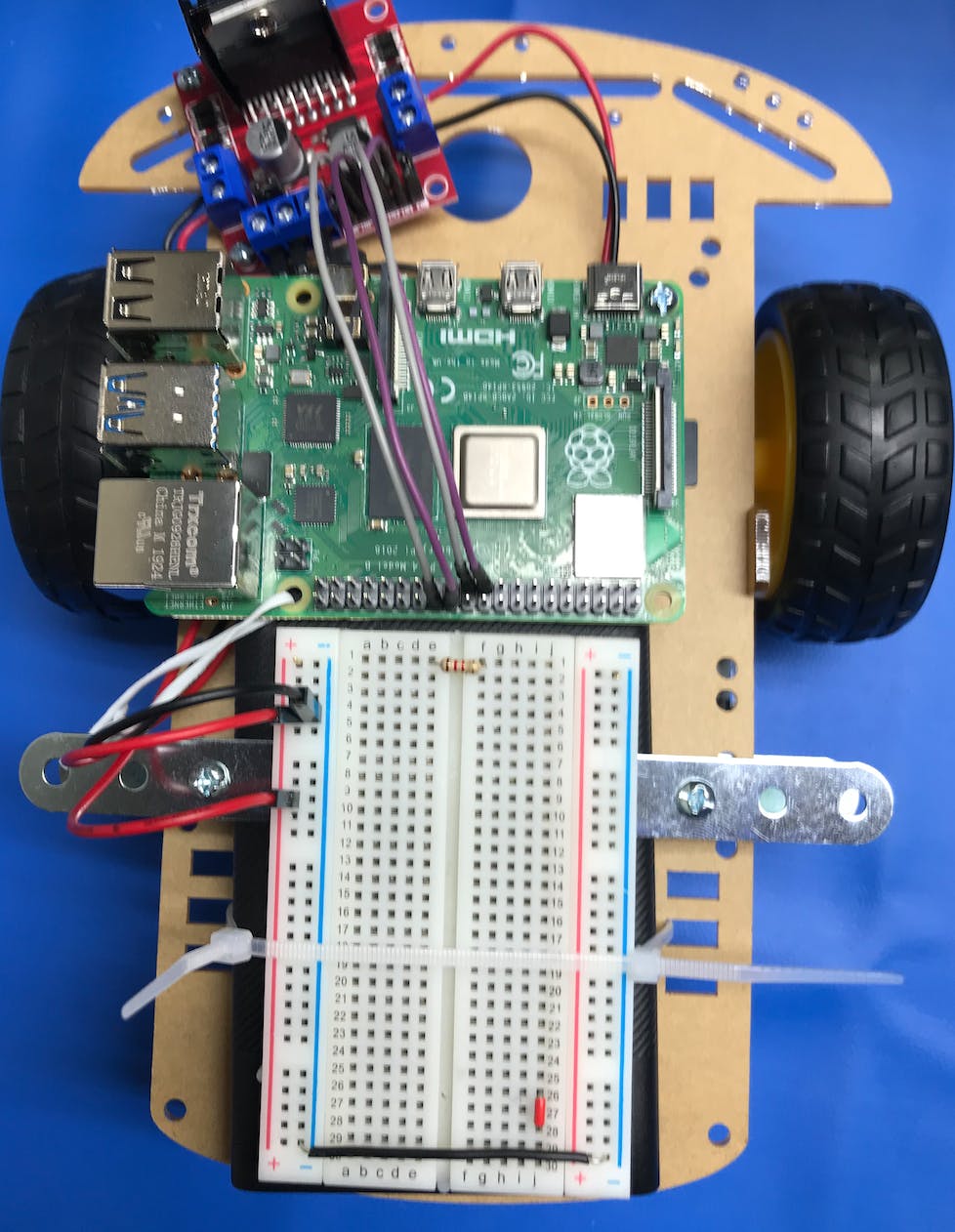
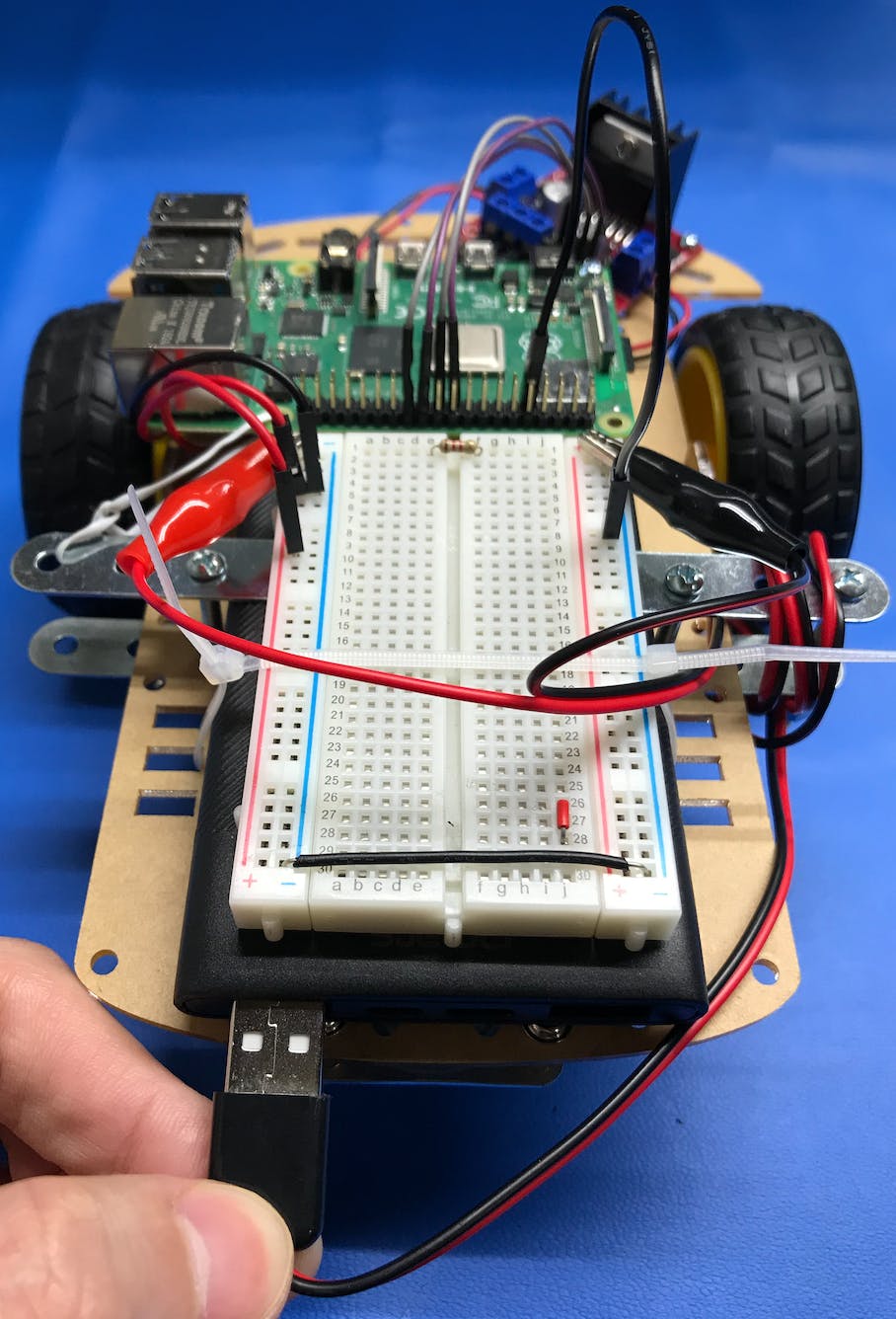
現(xiàn)在電源接線已完成,讓我們將移動(dòng)電源(電池)放在機(jī)箱頂部,但在 Raspberry Pi 和面包板下方。
在這個(gè)項(xiàng)目中,修補(bǔ)板用于將移動(dòng)電源固定到機(jī)箱上。您可能需要使用不同的方法(膠帶、螺栓和螺母、電纜扎帶等)。
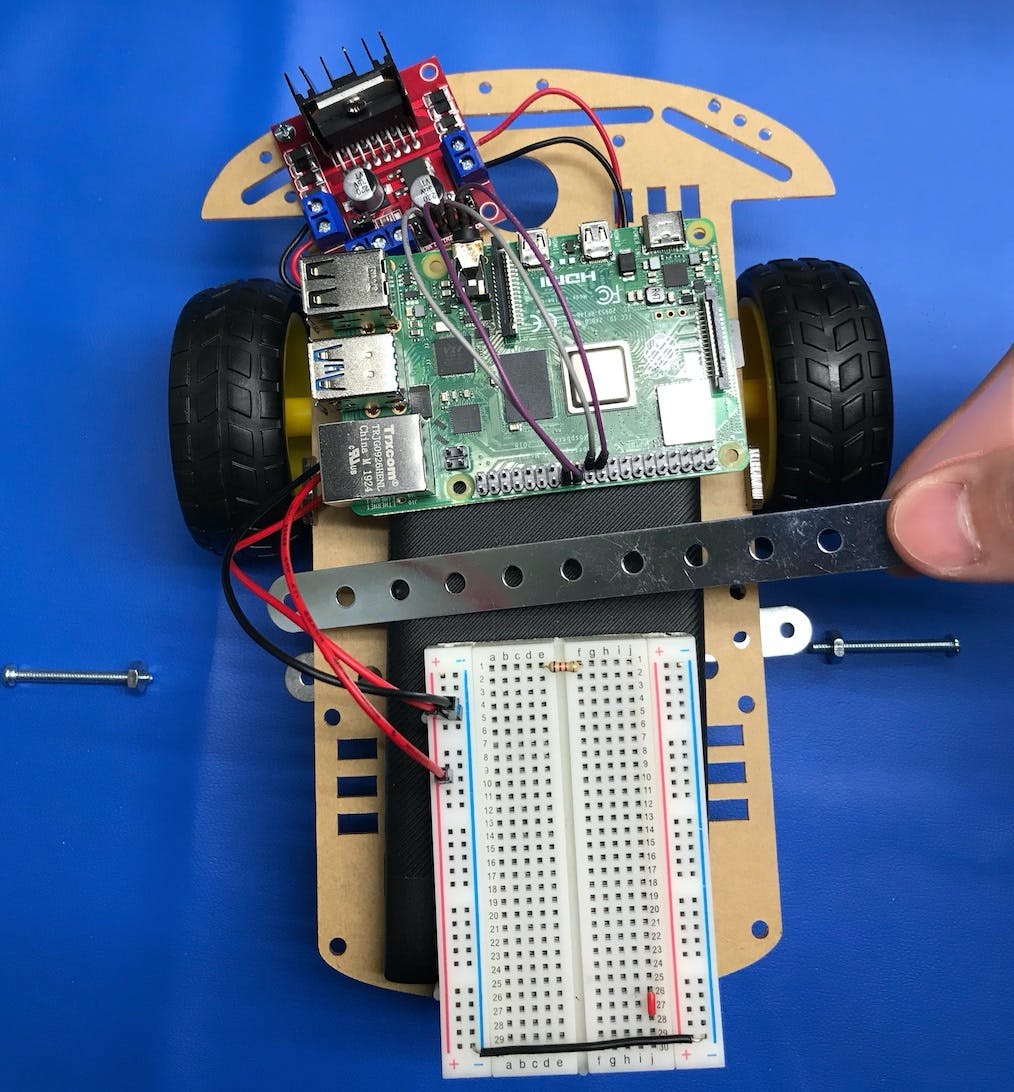
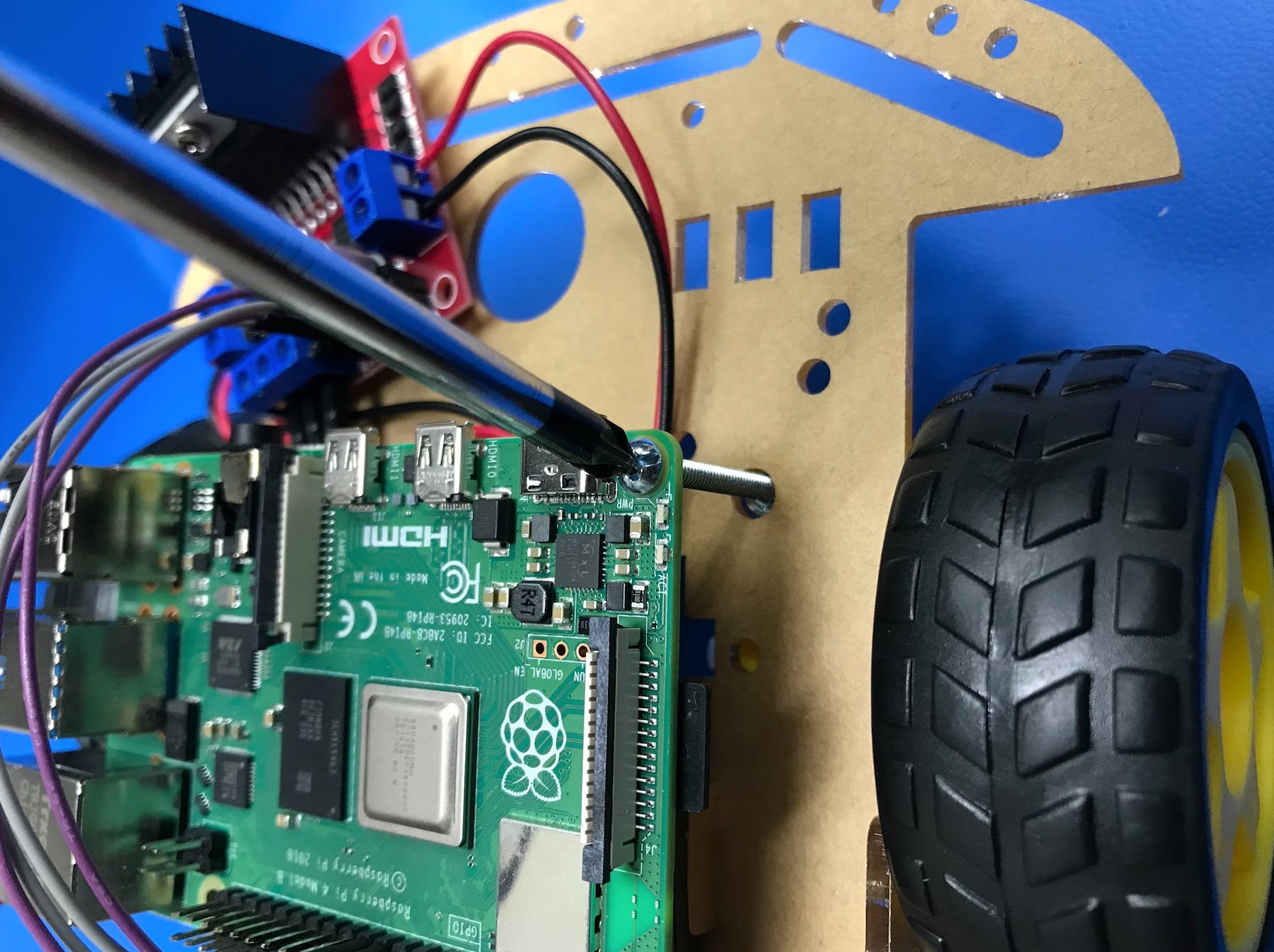
Raspberry Pi 使用螺栓和螺母固定在底盤上,還有一些電纜扎帶將其固定在修補(bǔ)板上。
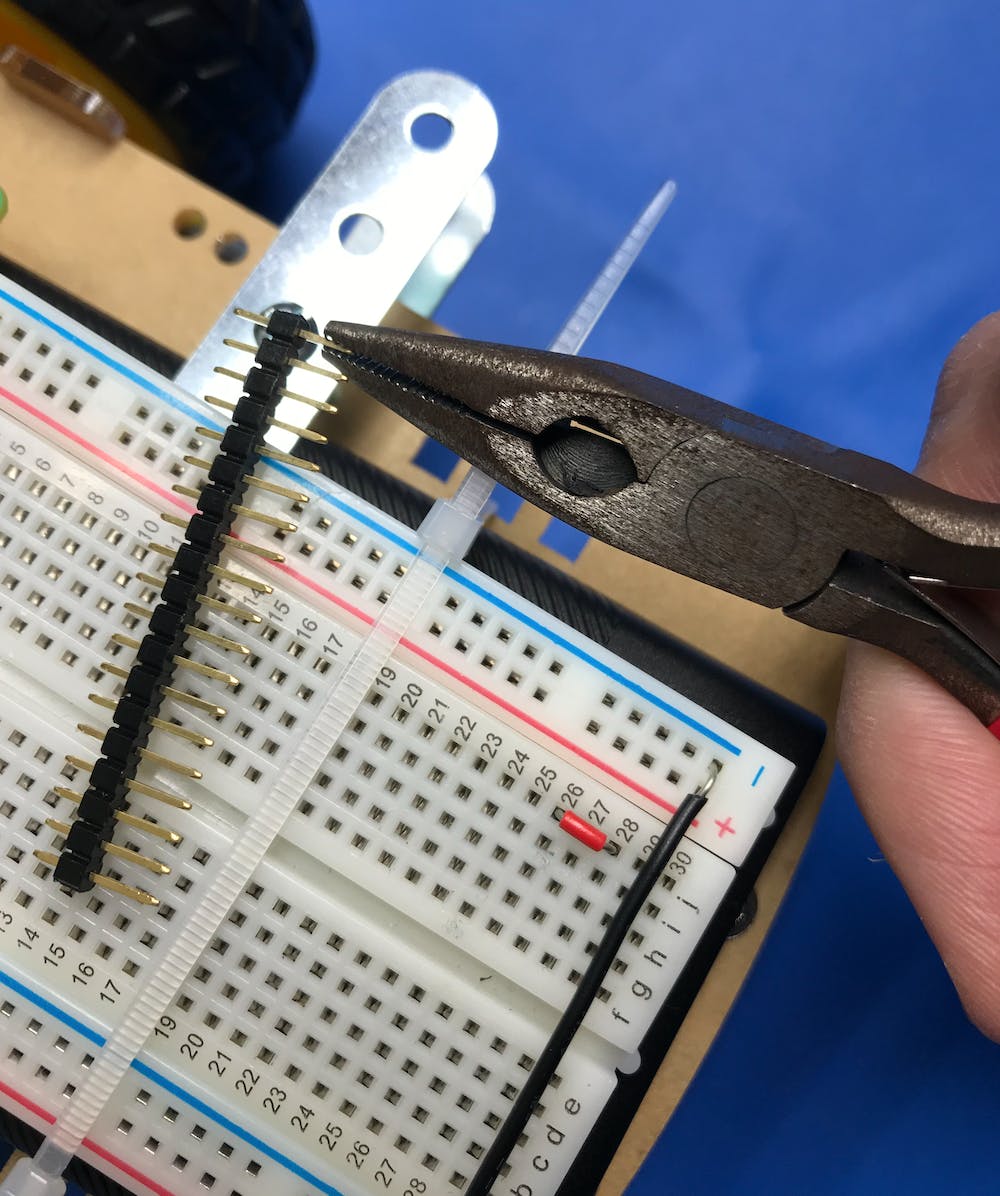
電纜扎帶用于將面包板固定到底盤上
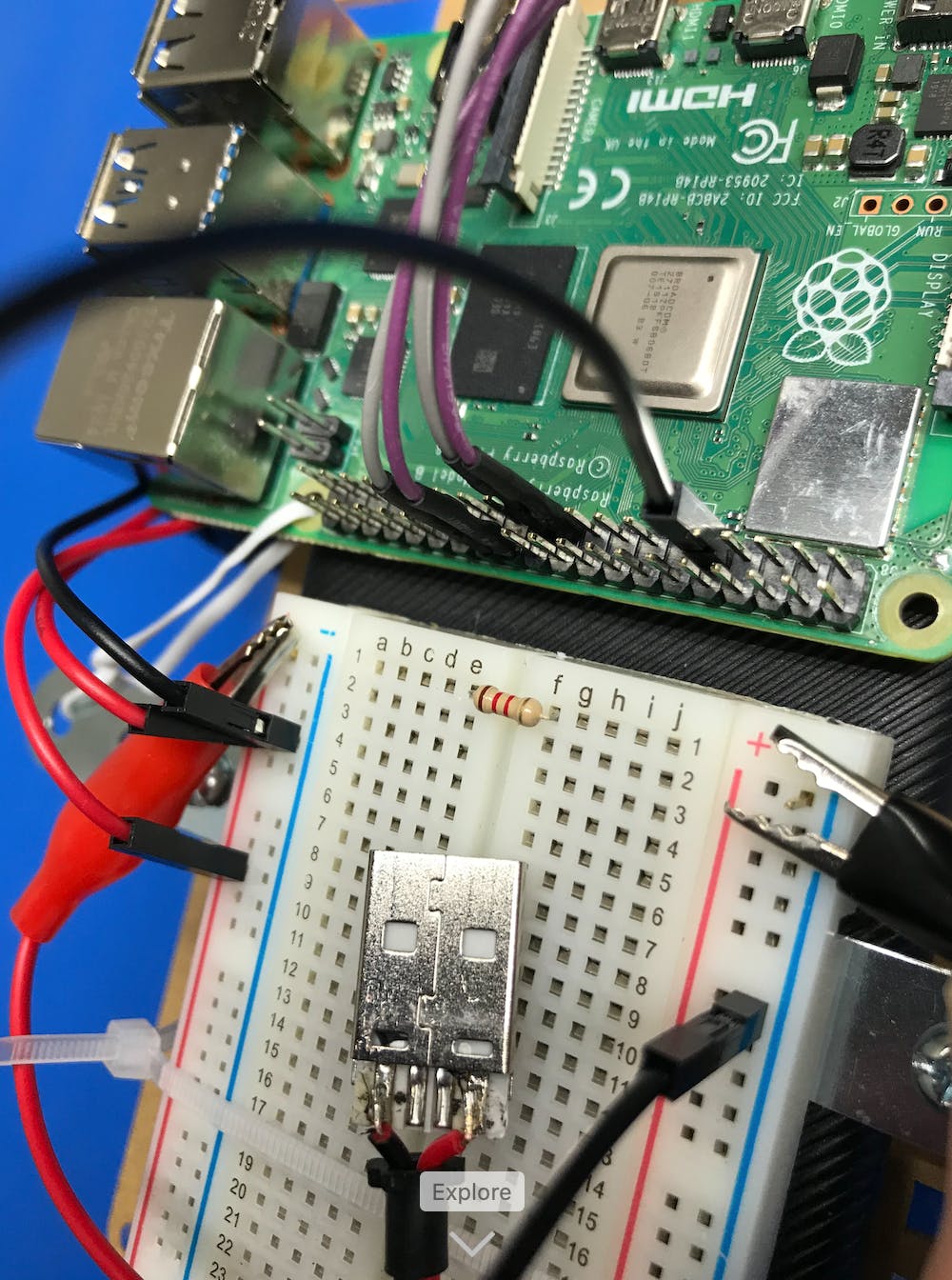
要將電源連接到面包板“+”和“-”導(dǎo)軌,請使用跳針將 USB 鱷魚夾連接到導(dǎo)軌。
要記住的一件非常重要的事情是為所有電路板和設(shè)備使用一個(gè)共同點(diǎn)。因此,請確保您還將 Raspberry Pi GND 品脫連接到面包板上的“-”電源軌。您將需要使用男性對女性(最好是黑色)來做到這一點(diǎn)。
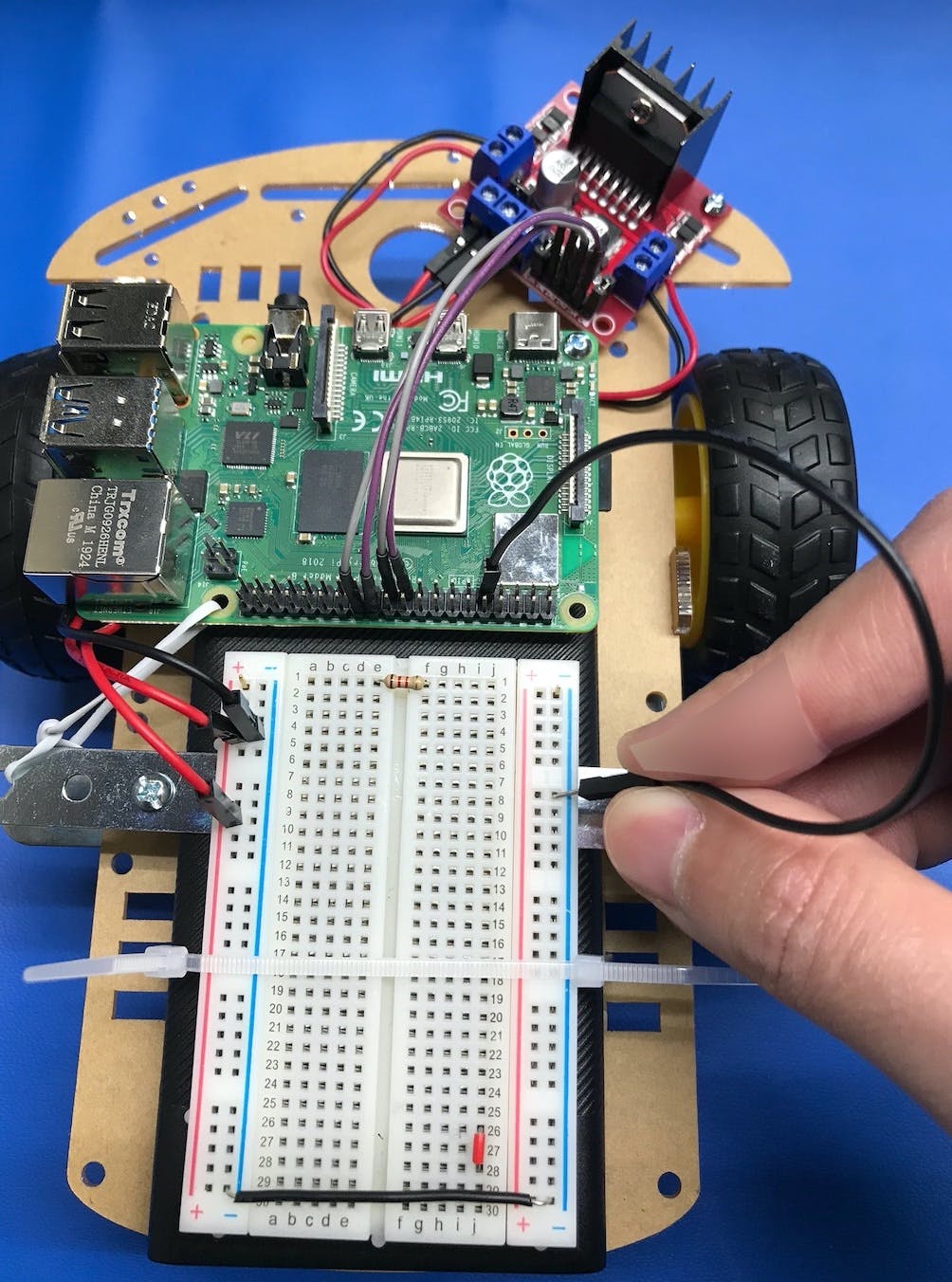
請注意,兩個(gè)負(fù)極 (-) 電源軌通過面包板底部的黑色跳線連接。
將 USB 紅色鱷魚夾連接到“+”導(dǎo)軌,將黑色鱷魚夾連接到面包板上的“-”導(dǎo)軌。
*注意:我只有 USB 轉(zhuǎn)鱷魚夾。更好的選擇是使用 USB 調(diào)試電纜,因?yàn)樗鼈兏踩腋菀走B接到面包板。您只需將紅色和黑色公對公跳線連接到 TTL 連接器。以下是 USB 調(diào)試電纜的兩種經(jīng)濟(jì)實(shí)惠的選擇:
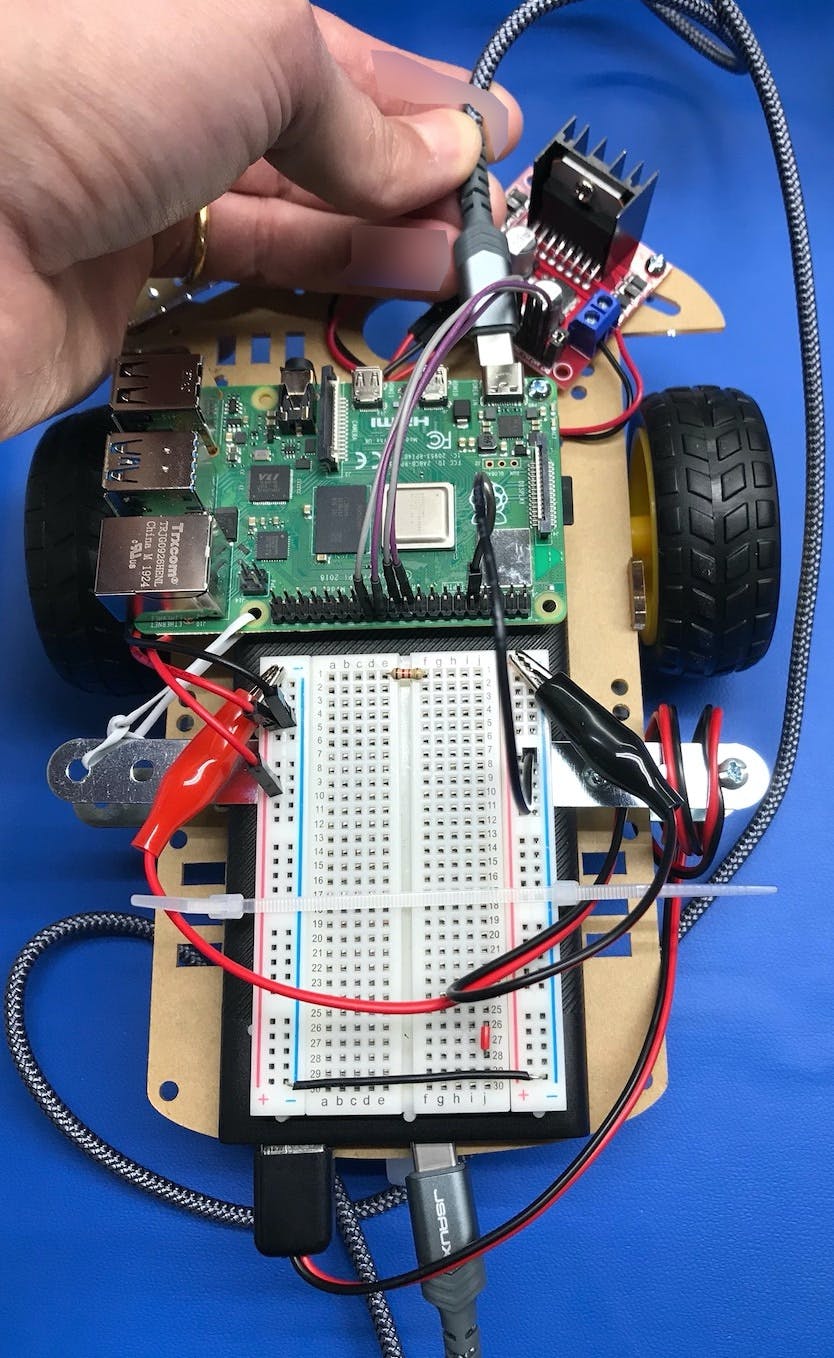
將USB端連接到移動(dòng)電源,檢查L298N板是否通電。如果不是,請檢查您的接線。
通過將 USB-C 電纜連接到移動(dòng)電源,打開 Raspberry Pi 4 板。如果您使用的是 Raspberry Pi 3 或 Zero,請使用 Micro USB 轉(zhuǎn) USB-A 并將其連接到移動(dòng)電源(本教程中建議的移動(dòng)電源有 2 個(gè) USB-A 輸出端口和 1 個(gè) USB-C 輸入/輸出端口)。
給機(jī)器人上電后,在我們最終開始編碼之前還有最后一步:將機(jī)器人連接到 WiFi 網(wǎng)絡(luò)。
將樹莓派連接到 WiFi
請參閱官方Raspberry Pi 文檔,了解如何將機(jī)器人連接到 WiFi。您可以在此處找到非常詳細(xì)的文檔。您需要做的就是確保將機(jī)器人(運(yùn)行 BluPants SD 卡映像)和瀏覽器(臺(tái)式機(jī)、平板電腦或手機(jī))連接到同一個(gè) WiFi 網(wǎng)絡(luò),這樣您就可以使用BluPants Studio對機(jī)器人進(jìn)行編程。
編碼時(shí)間!
打開 Raspberry Pi 并連接到 WiFi 后,打開瀏覽器并訪問http://blupants.org。確保您用來瀏覽的計(jì)算機(jī)也連接到您連接 Raspberry Pi 的同一個(gè) WiFi 網(wǎng)絡(luò)。
在“Robot”下拉菜單(右下角)中,選擇您的 Raspberry Pi 的 WiFi IP 地址,然后單擊“Play”:
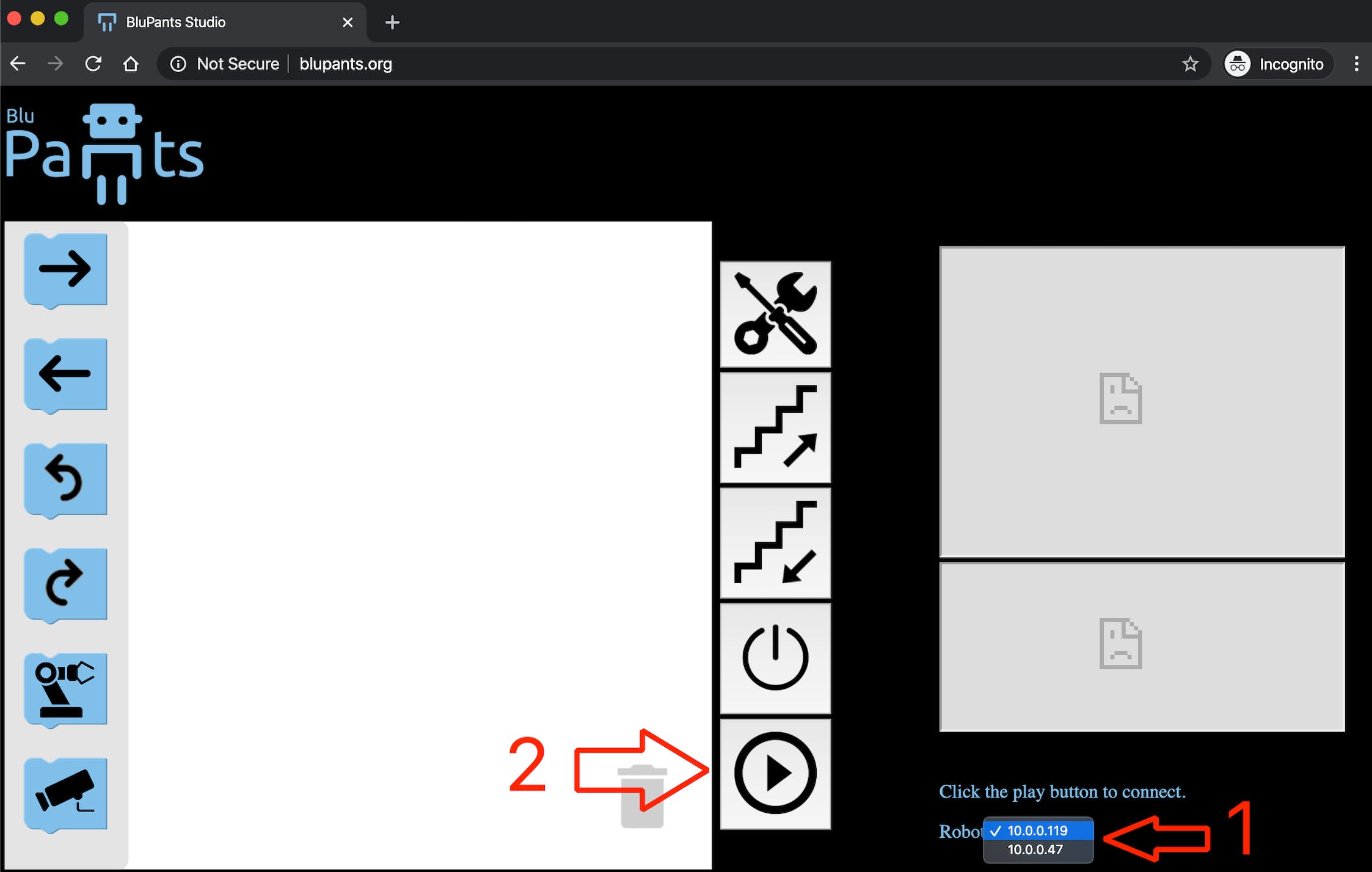
在此示例中,Raspberry Pi WiFi 地址為“10.0.0.119”。如果您看不到任何 IP 地址,請嘗試重新加載頁面,或打開和關(guān)閉瀏覽器。如果仍然無法連接,請參閱“BluPants 連接故障排除”部分。
現(xiàn)在您已連接,拖放一兩個(gè)“向前移動(dòng)”命令塊,然后單擊“播放”執(zhí)行它。
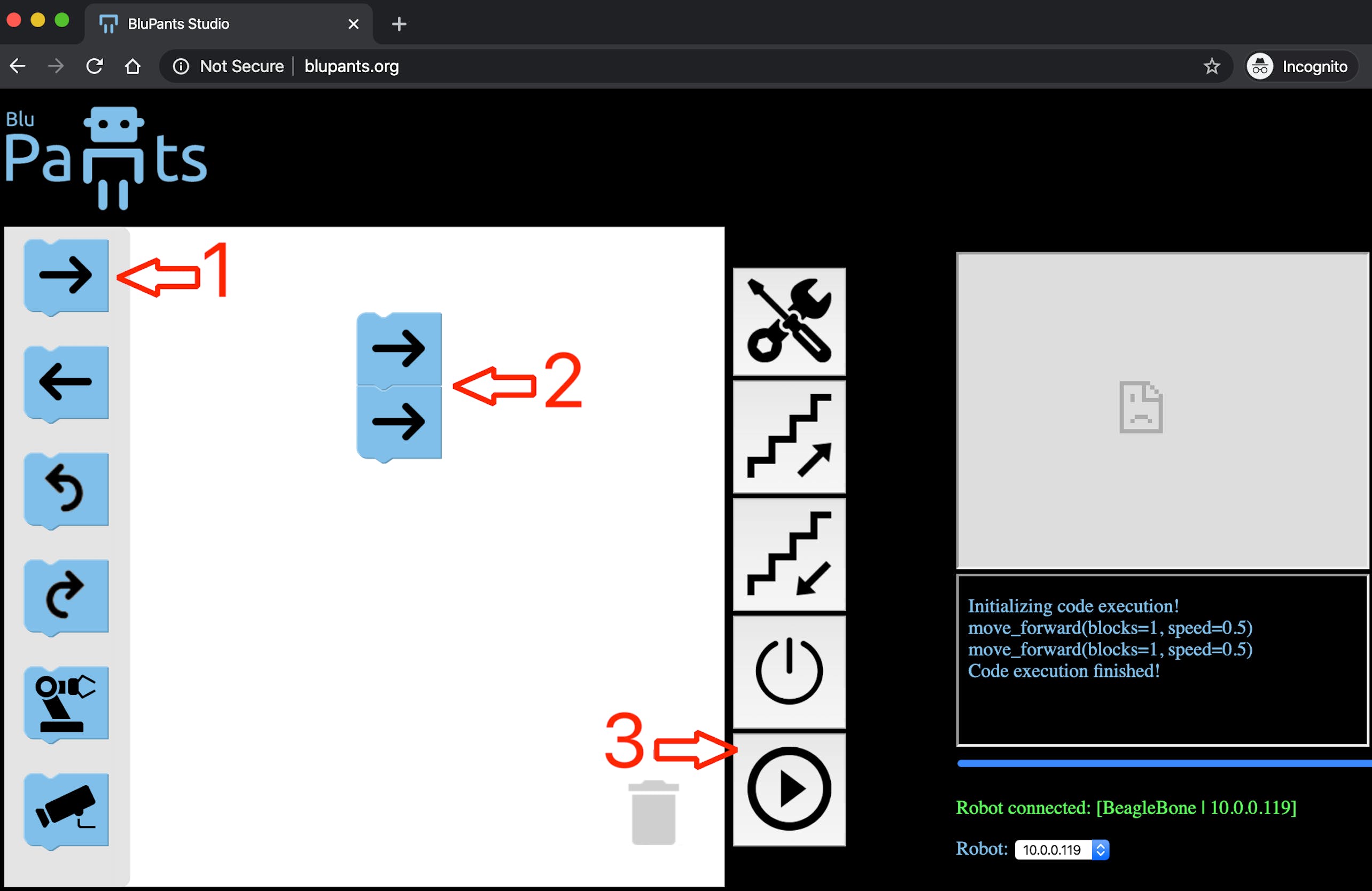
如果電機(jī)未按所需方向運(yùn)行,則將紅線和黑線連接反轉(zhuǎn)以恢復(fù)極性并再次運(yùn)行測試。查看下一節(jié)了解更多詳情。為了克服它,需要調(diào)整。我們希望從以下位置更改默認(rèn)值:
"raspberrypi":
{
"motor":
{
"turn_right_period": 0.005,
},
}
類似于:
"raspberrypi":
{
"motor":
{
"turn_right_period": 0.004,
},
}
您可以做的另一件事是,例如,您可能希望機(jī)器人在執(zhí)行“move_forward()”命令時(shí)進(jìn)一步移動(dòng)。為此,您需要做的就是增加默認(rèn)值
"block_length": 0.5,
至
"block_length": 0.9,
您還可以補(bǔ)償物理問題,例如一個(gè)電機(jī)運(yùn)行速度比另一個(gè)電機(jī)快(這會(huì)阻止機(jī)器人直線移動(dòng))。
假設(shè)您希望電機(jī) 2(右側(cè)的電機(jī))運(yùn)行速度慢 20%。為此,您將 duty_ratio 的第二個(gè)值從 1.0 更改為 0.8。
原始設(shè)置:
"raspberrypi":
{
"motor":
{
"duty_ratio": [1.0, 1.0, 1.0, 1.0],
},
}
右側(cè)電機(jī)運(yùn)行速度慢 20% 的設(shè)置:
"raspberrypi":
{
"motor":
{
"duty_ratio": [1.0, 0.8, 1.0, 1.0],
},
}
隨意編輯文件并測試您的代碼,直到您獲得所需的準(zhǔn)確性。如果由于某種原因,您破壞了 json 文件并且機(jī)器人不再工作,只需從github 下載原始副本。
wget https://raw.githubusercontent.com/blupants/blupants/master/src/python/blupants/blupants.json
恢復(fù)損壞的blupants.json文件后,您可能需要重新啟動(dòng)服務(wù)。要重新啟動(dòng)服務(wù),請打開命令提示符,然后運(yùn)行:
sudo service blupants restart
如果您需要任何進(jìn)一步的幫助,請隨時(shí)在本文中添加任何評論。
BluPants 連接故障排除
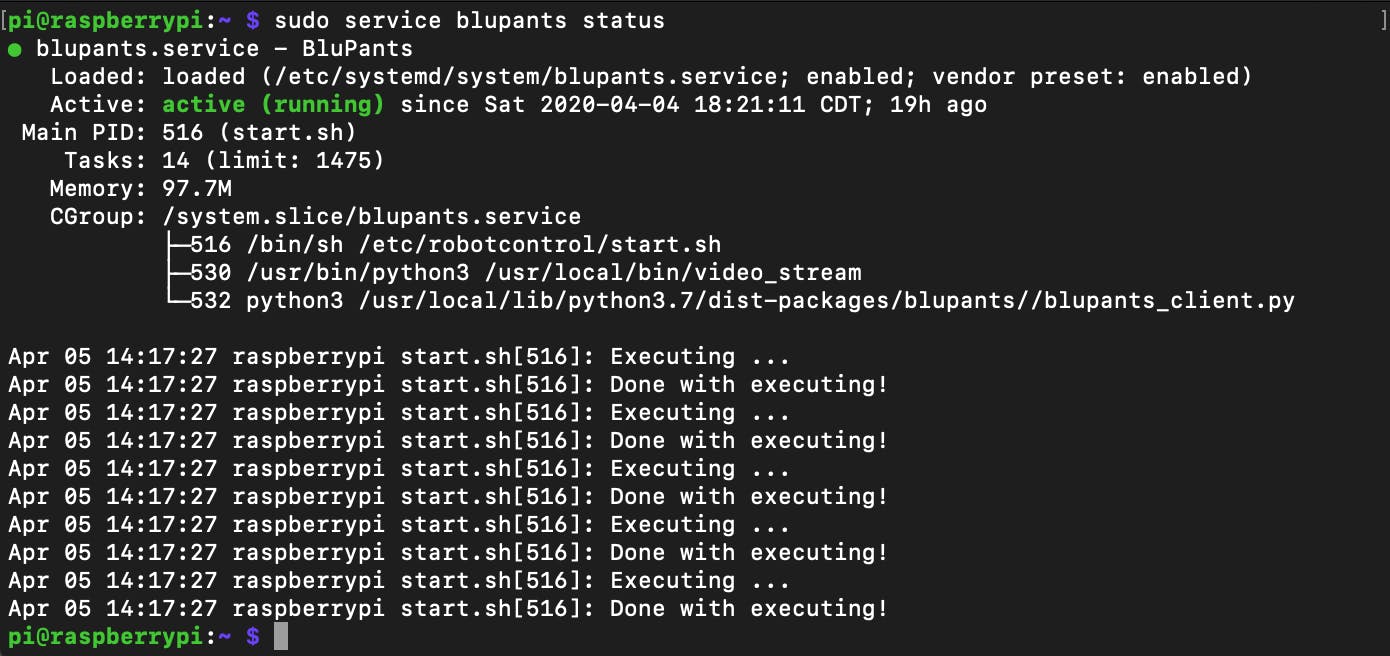
如果您無法將瀏覽器連接到 Raspberry Pi,請確保您的 BluPants 服務(wù)正在運(yùn)行。登錄到您的 Raspberry Pi(默認(rèn)憑據(jù)是用戶:pi,密碼:raspberry)并打開命令提示符。然后運(yùn)行命令:
sudo service blupants status
預(yù)期的結(jié)果應(yīng)該是這樣的:
如果需要重啟服務(wù),可以嘗試:
sudo service blupants restart
并再次檢查狀態(tài)。確認(rèn)服務(wù)正常運(yùn)行后,在瀏覽器上訪問http://blupants.org并嘗試再次連接到您的 Raspberry Pi 機(jī)器人。
或者,您可以嘗試直接在 URL 上提供您的 Raspberry Pi WiFi IP 地址。為了手動(dòng)獲取您的 WiFi IP 地址,請從您的 Raspberry Pi 命令外殼運(yùn)行以下命令:
ifconfig wlan0
你應(yīng)該得到類似的東西:
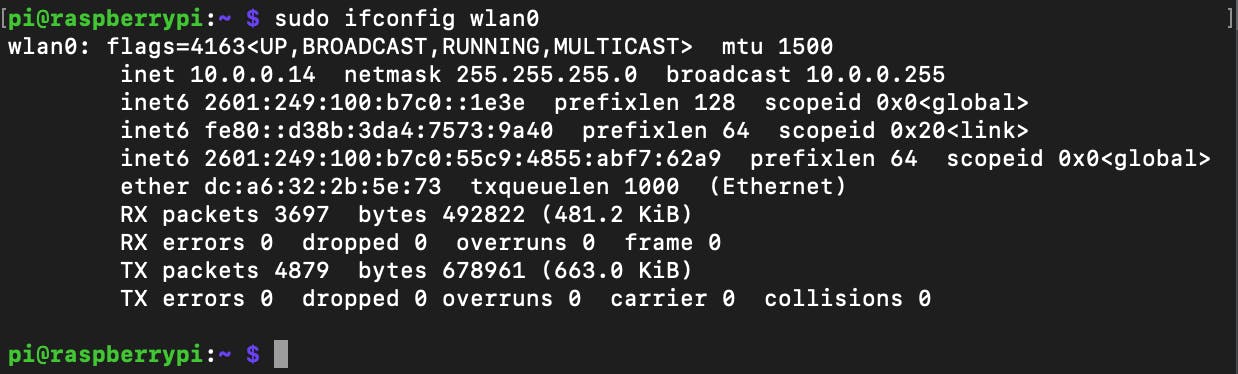
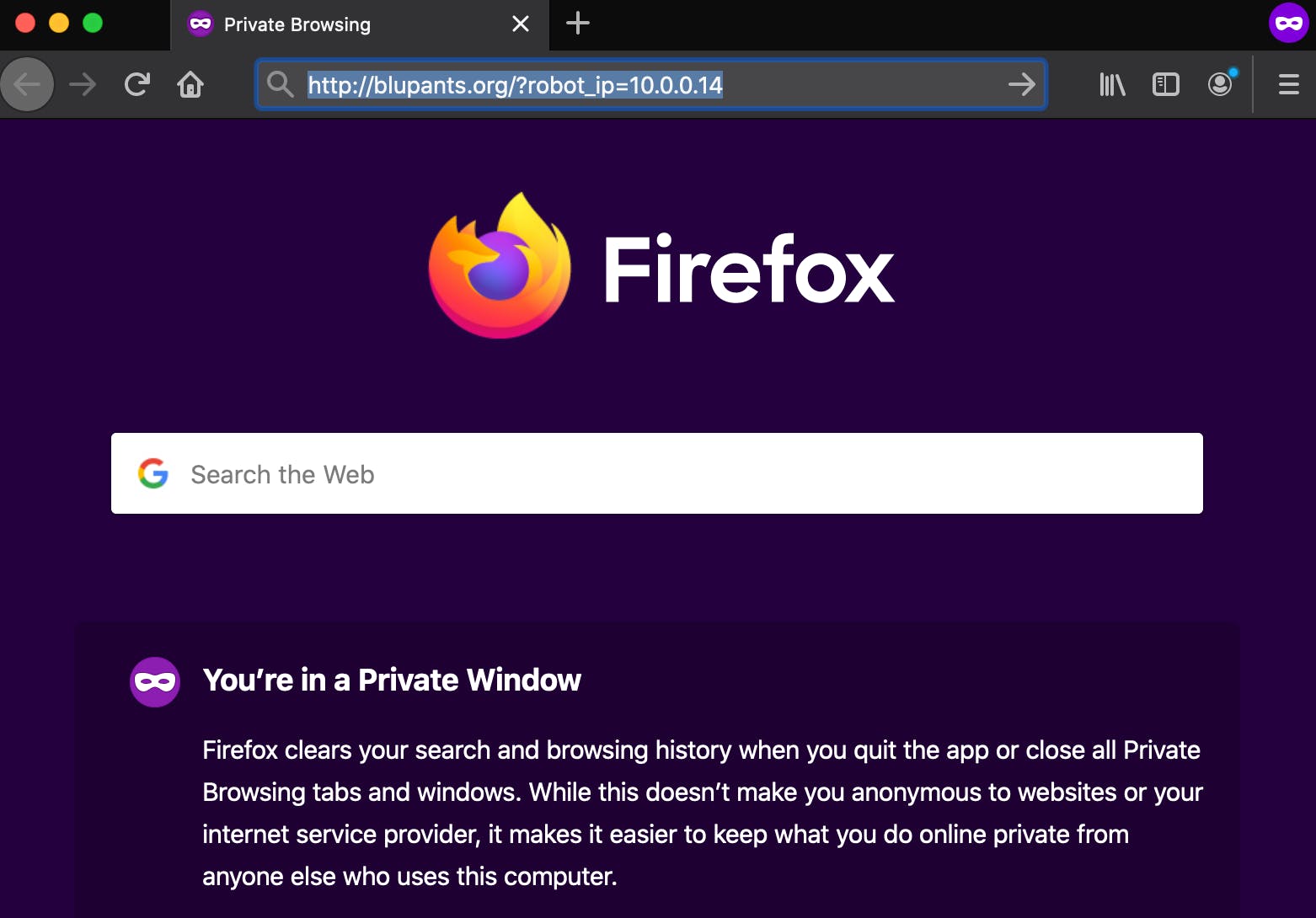
IP 地址在第三行 (inet) 上顯示為“10.0.0.14”。您的 IP 很可能會(huì)有所不同。現(xiàn)在我們知道了我們的 IP 地址,我們可以像這樣直接在瀏覽器 URL 上使用它:
http://blupants.org/?robot_ip=10.0.0.14
確保將“10.0.0.14”替換為您自己的 IP 地址并將其粘貼到瀏覽器地址欄中。打開頁面并單擊“播放”按鈕進(jìn)行連接。
如果您需要任何進(jìn)一步的幫助,請?jiān)诒疚闹刑砑尤魏卧u論,我們將為您提供幫助。在Twitter 上關(guān)注我們以隨時(shí)關(guān)注所有新版本。爪教程是第一次擴(kuò)展基本 MVP 機(jī)器人的好選擇。您還可以按照本教程向您的機(jī)器人添加距離傳感器和/或按照本教程向其添加相機(jī)。
將來,我們將涵蓋機(jī)器學(xué)習(xí)、文本到語音、使用 OpenCV 4 的計(jì)算機(jī)視覺等主題。所有這些內(nèi)容已經(jīng)原生包含在您今天剛剛刷入 micro SD 卡的 BluPants 圖像中。
您可能想進(jìn)一步探索它并自己嘗試新事物。如果您有這種感覺,請嘗試自己構(gòu)建更多東西。BluPants 是一個(gè)旨在讓您邊做邊學(xué)的平臺(tái)。如果您想給我們留言,請隨時(shí)添加評論和/或直接與我們聯(lián)系。
下次見!
Robot4() {
return Humans++;
}
- 使用Raspberry PI和open CV進(jìn)行圖像處理
- 使用Beaglebone和BluPants進(jìn)行編碼
- 使用AlphaBot2-Pi和BluPants進(jìn)行編碼
- 通過USB對Raspberry Pi進(jìn)行編程
- Arduino和Raspberry Pi平臺(tái)進(jìn)行編碼
- 使用ROS和Raspberry Pi進(jìn)行Bittle遠(yuǎn)程操作
- 使用Raspberry Pi進(jìn)行汽車診斷
- Raspberry Pi和你的倉鼠進(jìn)行股市交易
- 使用Raspberry Pi和Arduino進(jìn)行花卉監(jiān)測
- 可視頻直播的Raspberry Pi網(wǎng)絡(luò)控制機(jī)器人 14次下載
- 《愛上Raspberry Pi》中譯版-電子書籍.pdf 0次下載
- Instant Raspberry Pi Gaming 6次下載
- Raspberry_Pi詳解 16次下載
- raspberry_pi各版本差別 0次下載
- Learn Raspberry Pi Programming with python 0次下載
- 5分鐘內(nèi)將Raspberry Pi Pico變成簡單的示波器+波形發(fā)生器 2318次閱讀
- 基于Raspberry Pi 5的蜂窩物聯(lián)網(wǎng)項(xiàng)目 1312次閱讀
- 使用Raspberry Pi Pico W和MicroPython開發(fā)物聯(lián)網(wǎng)應(yīng)用 2180次閱讀
- 用于測試項(xiàng)目的4個(gè)最佳樹莓派Raspberry Pi模擬器 6823次閱讀
- 如何使用Raspberry Pi使熱水浴缸變得智能和遠(yuǎn)程操作 1985次閱讀
- 如何通過Raspberry Pi設(shè)置CE電流監(jiān)視器 2342次閱讀
- 基于樹莓派產(chǎn)品 Raspberry Pi微控制器板的優(yōu)缺點(diǎn) 2984次閱讀
- 基于Raspberry Pi Pico開發(fā)先進(jìn)的家庭自動(dòng)化系統(tǒng) 3004次閱讀
- 基于FONA通過UART與Raspberry Pi進(jìn)行通訊的方案介紹 2257次閱讀
- 微雪電子ZeroW| Raspberry Pi ZeroW主板簡介 2618次閱讀
- 微雪電子Raspberry Pi 3 Model主板簡介 3146次閱讀
- 微雪電子Raspberry Pi 3 Model擴(kuò)展板簡介 1667次閱讀
- 利用Raspberry Pi構(gòu)建存儲(chǔ)和虛擬化時(shí)間序列數(shù)據(jù) 952次閱讀
- 一文了解Raspberry Pi 4各項(xiàng)性能跑分 3w次閱讀
- 視覺享受!用Raspberry Pi實(shí)現(xiàn)圣誕樹燈光秀 8344次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1貼片三極管上的印字與真實(shí)名稱的對照表詳細(xì)說明
- 0.50 MB | 76次下載 | 1 積分
- 2Altium Designer AD 25 軟件安裝包下載
- 0.00 MB | 3次下載 | 免費(fèi)
- 3Altium Designer 23 軟件下載
- 0.00 MB | 2次下載 | 免費(fèi)
- 4Altium Designer 22.11.1軟件安裝包下載
- 0.00 MB | 1次下載 | 免費(fèi)
- 5PADS Professional vx 2.11 安裝包
- 0.00 MB | 1次下載 | 5 積分
- 6高頻率變壓器的設(shè)計(jì)
- 0.03 MB | 1次下載 | 1 積分
- 7ANT8817 1%3.5W/3.7V,同步自適應(yīng)升壓,超長續(xù)航,H類防破音單聲道音頻功放中文手冊
- 1.11 MB | 1次下載 | 免費(fèi)
- 8NS6326 4-30V輸入5V/3A輸出同步降壓穩(wěn)壓器中文手冊
- 1.22 MB | 次下載 | 免費(fèi)
本月
- 1蘇泊爾電磁爐線路的電路原理圖資料合集
- 2.02 MB | 286次下載 | 5 積分
- 2長虹液晶電視R-HS310B-5HF01的電源板電路原理圖
- 0.46 MB | 87次下載 | 5 積分
- 3貼片三極管上的印字與真實(shí)名稱的對照表詳細(xì)說明
- 0.50 MB | 76次下載 | 1 積分
- 4U盤一鍵制作
- 23.84 MB | 41次下載 | 免費(fèi)
- 5AI智能眼鏡產(chǎn)業(yè)鏈分析
- 4.43 MB | 39次下載 | 免費(fèi)
- 6AO4803A雙P通道增強(qiáng)型場效應(yīng)晶體管的數(shù)據(jù)手冊
- 0.11 MB | 28次下載 | 2 積分
- 7長虹液晶彩電LS29機(jī)芯的技術(shù)資料說明
- 3.42 MB | 16次下載 | 2 積分
- 8TP4055 500mA線性鋰離子電池充電器中文手冊
- 0.75 MB | 9次下載 | 免費(fèi)
總榜
- 1matlab軟件下載入口
- 未知 | 935127次下載 | 10 積分
- 2開源硬件-PMP21529.1-4 開關(guān)降壓/升壓雙向直流/直流轉(zhuǎn)換器 PCB layout 設(shè)計(jì)
- 1.48MB | 420064次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233089次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費(fèi)下載
- 340992 | 191387次下載 | 10 積分
- 5十天學(xué)會(huì)AVR單片機(jī)與C語言視頻教程 下載
- 158M | 183342次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81586次下載 | 10 積分
- 7Keil工具M(jìn)DK-Arm免費(fèi)下載
- 0.02 MB | 73815次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65988次下載 | 10 積分





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論