 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
描述
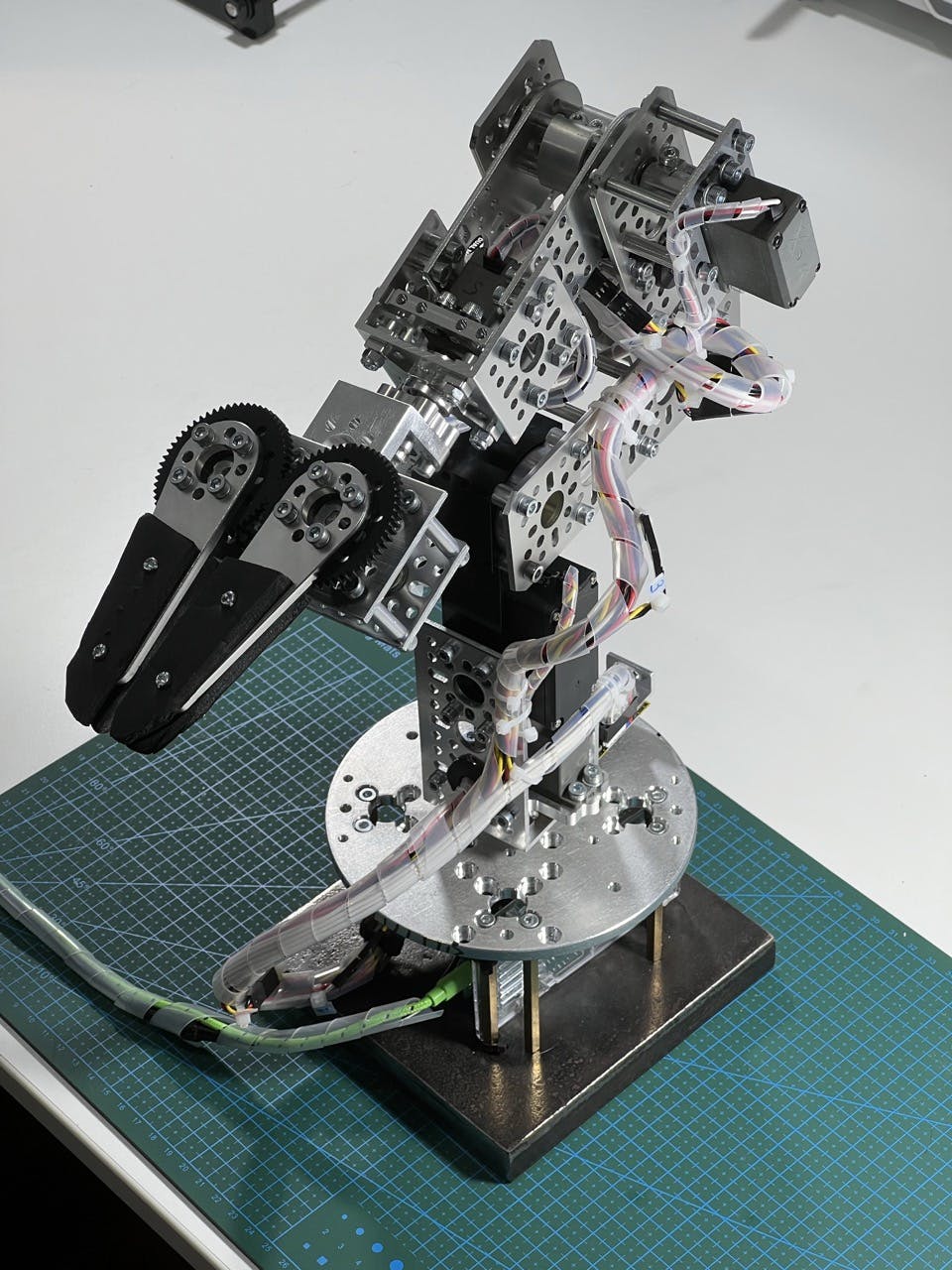
本次迭代繼續該項目,從頭開始構建一個簡單的機械臂,并以迭代 2中的經驗教訓為基礎。
肩部重建手術
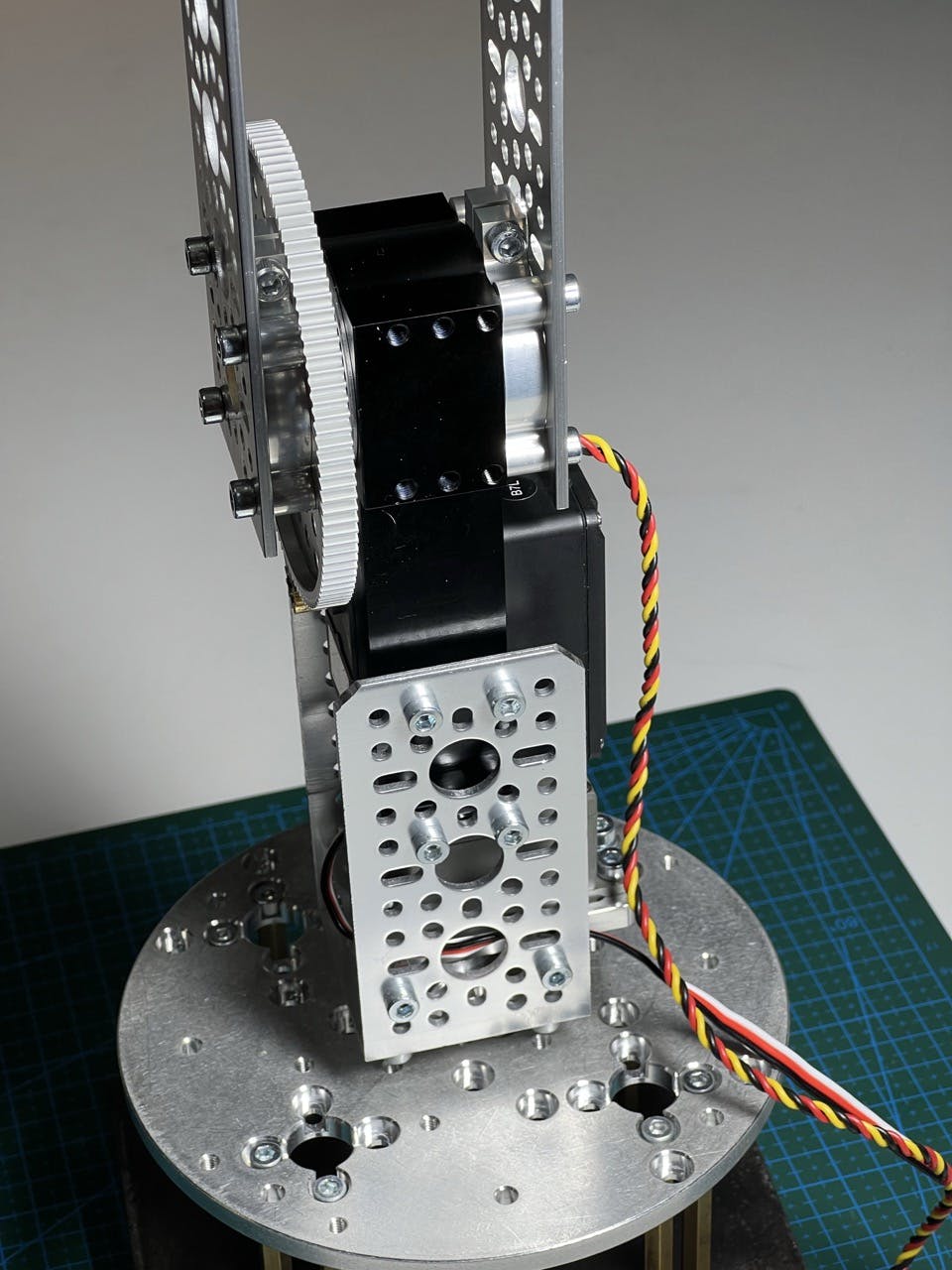
重做肩關節的目的是增加扭矩輸出。新的變速箱伺服產生 118.8 kg.cm,修改后的臂距肩軸中心 40+ cm 外側。所以執行器的肩部扭矩應該是~2.97kg.40cm(從上一次迭代中的~0.72kg.30cm增加)
齒輪箱配有 32 毫米外徑 39 毫米長的法蘭軸。為了讓輪轂安裝在反面,這被換成了一個 50 毫米長的無法蘭鋁管。1500 系列 1mm 塑料墊片用于防止第二個輪轂接觸變速箱殼體。
肩肘鏈接現在由兩個五孔(1123 系列)模板實現。這些板最終以大約 49 毫米的間隔分離。兩個由墊片覆蓋的 70mm 螺紋 M4 桿在連桿中間提供交叉支撐。
在肘關節上方和肩關節下方,手臂在結構上與迭代 1 相同。
一個重要的警告是避免過度驅動Hitec HS-788HB齒輪箱伺服。該伺服系統可以旋轉七圈(2826 度)并且沒有任何物理旋轉停止。不要驅動低于 0.600ms 或高于 2.400ms 的 PWM 信號,否則伺服將持續旋轉,內部電位器可能會根據伺服的方向與軸分離。
?
?
新傳感器
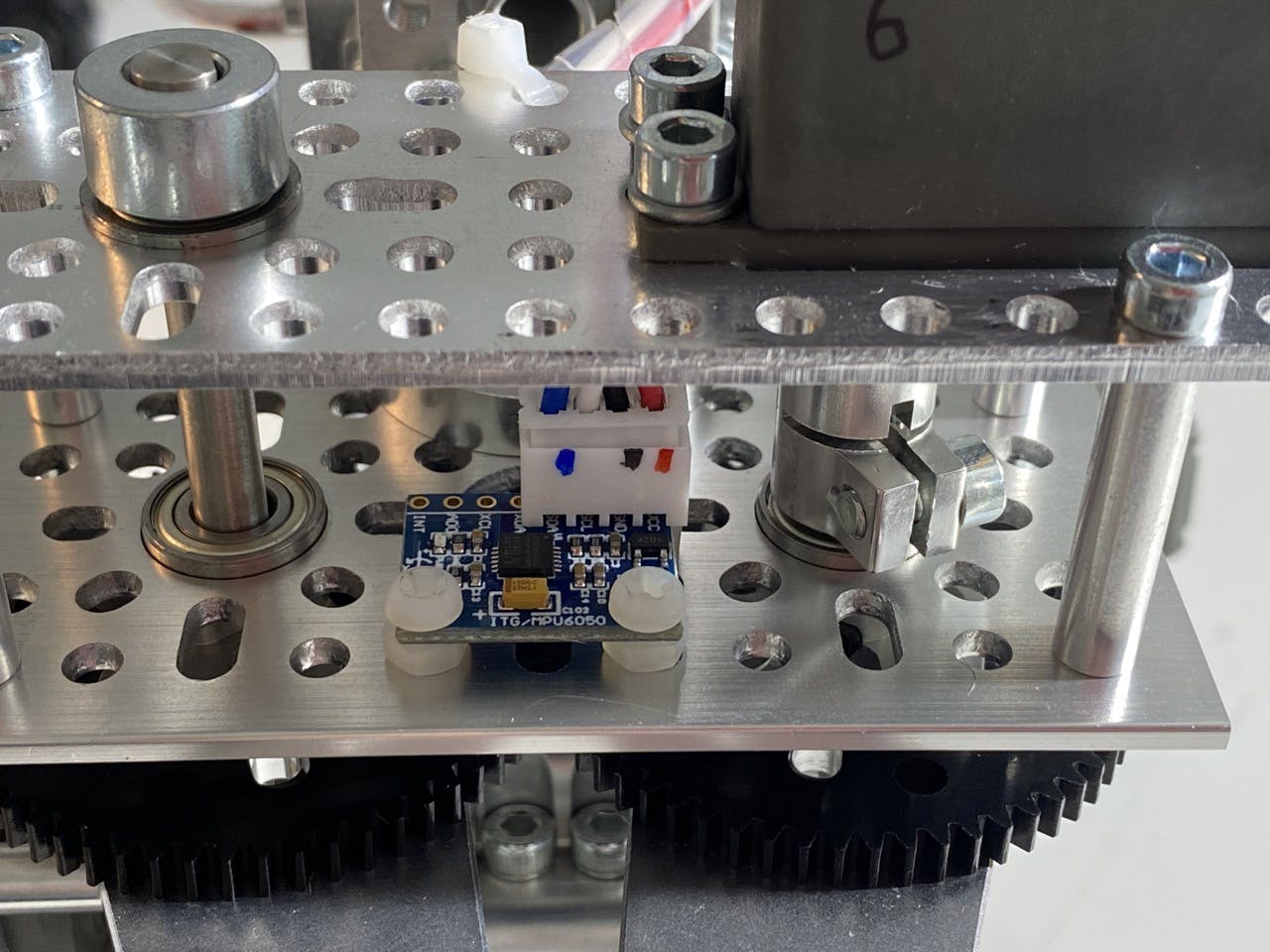
如圖所示,在執行器/夾持器組件中添加了通用MPU6050 3 軸陀螺儀、3 軸加速度計。傳感器是 I2C 連接的。迭代 3 的軟件從傳感器檢索未處理的讀數,但在未來的迭代中,我希望計算更多關于執行器的運動。如照片中所示,傳感器 x 軸沿末端執行器定向(即,朝向照片的觀看者)。
I2C 連接到 SDA1(引腳 70)SCL1(引腳 71)、3.3V 和 GND 上的 Wire1 Due 端口。
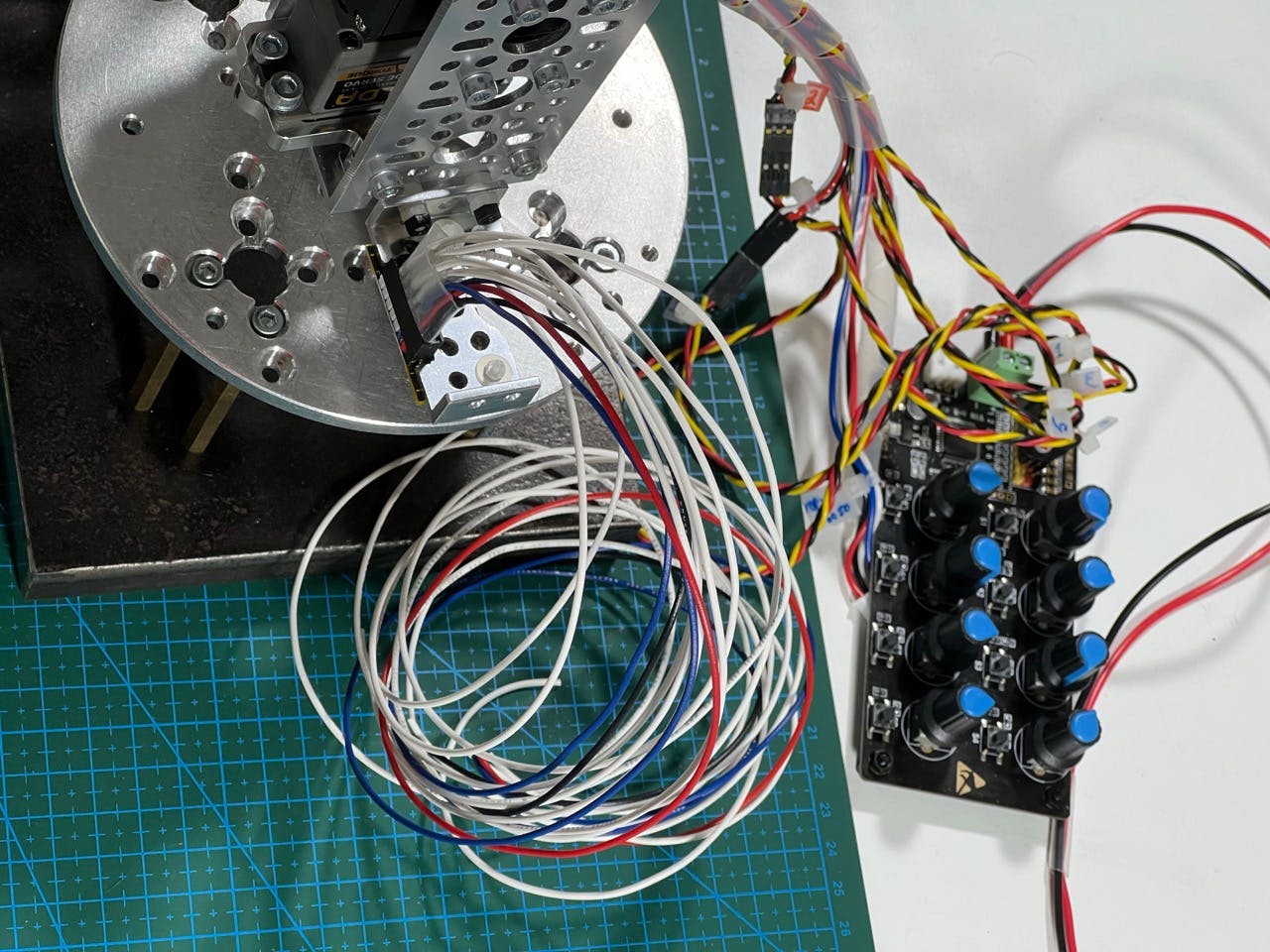
一個九軌Pololu QTRX-HD-09A 紅外反射傳感器陣列已安裝,為未來的基本旋轉絕對編碼器做好準備。僅計劃使用 8 條軌道。由于連接到引腳 A0-A7(八個數據通道)、5V、GND、D52(偶數控制)、D53(奇數控制)
新基地 - 鎮流器
新的重型底座可防止機械臂在突然移動時翻倒。70 毫米六角支架為容納微控制器和電子設備開辟了合適的空間。

夾持器修改
原型藝術家的泡沫板“手指套”已添加到夾具中,以延長手指長度,增加抓地力,增加手指寬度,并嘗試不同形狀的設計。當找到合適的設計時,未來的迭代將著眼于更堅固的材料。

新的 Arduino 代碼
該項目的 Arduino 代碼已在此迭代中真正啟動。以前的迭代使用基于Adafruit PWM 伺服庫示例的代碼。這個迭代從那個開始繼續。請參閱下面附件部分中項目 GitHub 存儲庫的鏈接。代碼目前正在開發分支上更新,當有一些有用且穩定的東西時,它將合并到主分支。
仍在進行中的代碼設計元素是:
新的測試設備
在迭代 1 和 2 之間,已經開發和獲得了幾種新的伺服測試方法。
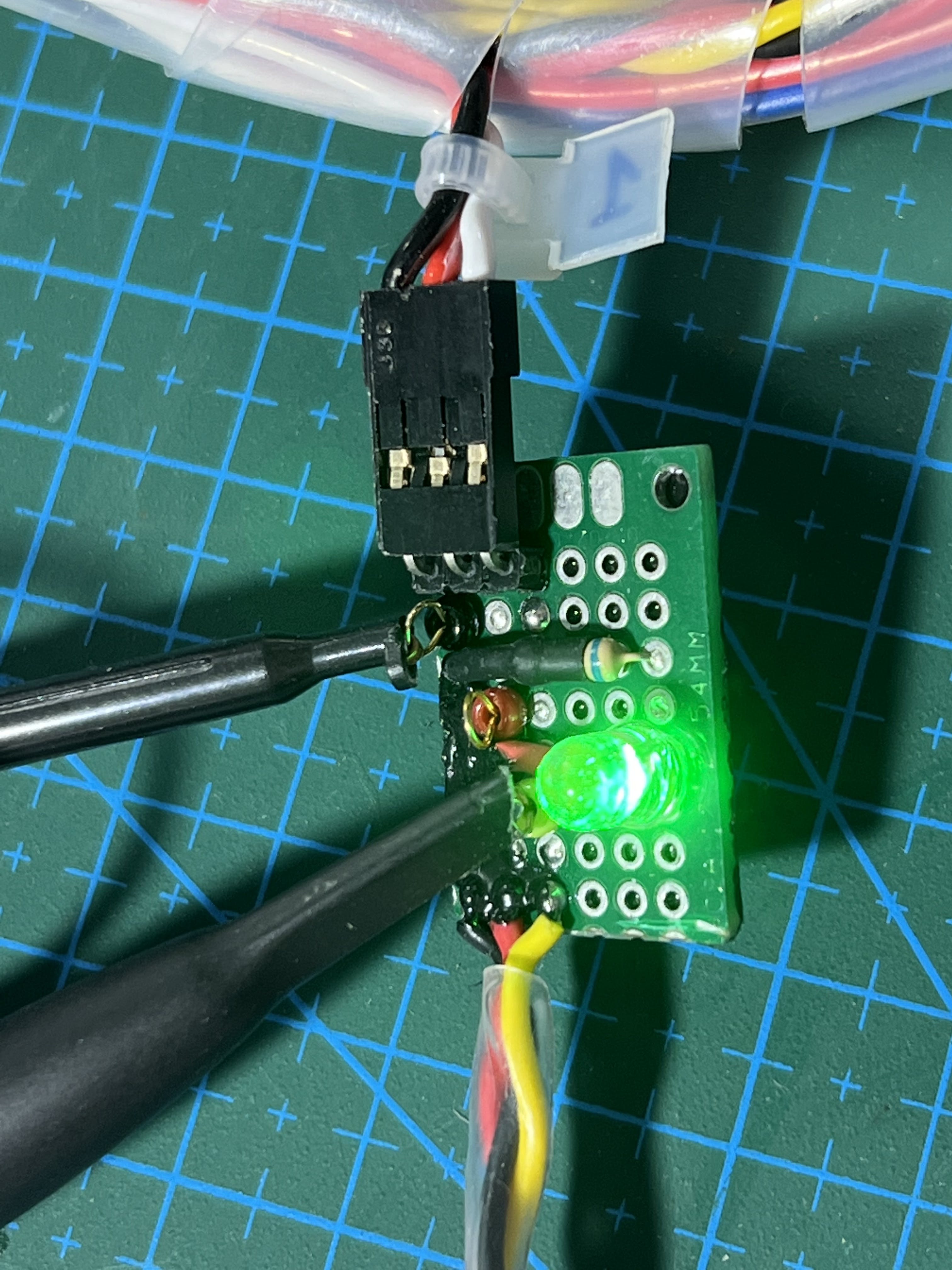
自制的 protoboard 伺服連接器分線器用于將測試點插入伺服線路。該板有一個 LED 指示燈,用于顯示電機電源何時帶電以及每條伺服線路(5V、GND、PWM 信號)上的測試點。這非常有用,因為示波器仍然是首選的 PWM 測試工具。
Gobilda為他們的 2000 系列伺服系統制作了伺服編程器。這是在默認模式和連續模式之間更改伺服系統所必需的(如果有用的話)。它還具有基本的 3 點測試模式和掃描模式。
我還在eBay 上購買了一個(非常)通用的八通道伺服測試控制器板。它運作良好。如上圖 Pololu 傳感器陣列照片所示。
完成手臂
至少在這次迭代中……它開始讓我想起紅矮星的Skutter 。
反射
PCA9685 模塊的使用源于我的第一個 arm 項目,該項目遠離 Arduino Uno 和 Braccio Shield。單獨為微控制器供電的不確定性使 PCA9685 模塊成為一個舒適的過渡步驟,它保持了與 Braccio Shiel d 的向后兼容性。我覺得不再需要了。Due 有很多可用的引腳。校準 PCA9685 增加了一個額外的步驟,并且 PWM 輸出沒有達到應有的高度準確。未來的迭代可能會回到直接從 Arduino Due 驅動伺服 PWM。
- 粒子動力機械臂開源構建
- 機械臂快遞分揀系統(一)之機械臂控制程序(下位機)編寫
- 最簡單的機械臂
- 由MPU 6050控制的簡單2軸伺服機械臂
- 迷你機械臂構建
- 工業機械臂
- 基于YOLOv3等的機械臂藥盒智能抓取方法 61次下載
- 基于FuzzyP的多臂機器人機械臂控制系統 13次下載
- 機械臂手冊使用說明 17次下載
- 使用SimMechanics實現六自由度的機械臂仿真研究 1次下載
- 機械臂電路設計開源合集,電機工程師們的杰作 47次下載
- 如何使用深度強化學習進行機械臂視覺抓取控制的優化方法概述 22次下載
- 液壓驅動連續型機械臂原理與設計 0次下載
- 取件機械臂定位精度優化 3次下載
- 機械臂關節驅動組件 7次下載
- 使用myCobot 280機械臂結合ROS2系統搭建機械分揀站 89次閱讀
- 深度解析!RK3568 加持機械臂是如何實現顏色識別與抓取的? 67次閱讀
- 基于六維力傳感器的機械臂自動裝配應用 834次閱讀
- 【開源獲獎案例】四軸機械臂控制系統 1319次閱讀
- 基于深度強化學習的視覺反饋機械臂抓取系統 2473次閱讀
- 如何構建一個簡單而逼真的模型列車控制器電路 1390次閱讀
- 如何構建一個簡單的基于紅外的車門遙控器 1350次閱讀
- 如何構建一個簡單的12V至19V升壓轉換器電路 3267次閱讀
- 如何使用NTC和PTC熱敏電阻構建一個簡單的溫度指示電路 2982次閱讀
- 一個非常容易構建的簡單金屬探測器電路 2975次閱讀
- dfrobotArduino開發實戰-遙控機械臂套裝簡介 2531次閱讀
- MATLAB機械臂的兩種路徑規劃 9167次閱讀
- 為什么最好的機械臂是7個自由度而不是6個自由度 2.6w次閱讀
- 分享最好的機械臂是7個自由度的原因 1.8w次閱讀
- 基于MicroZed的五軸自動化機械臂Dexter 3443次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數據手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅動電路設計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網監
工商網監
評論