 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
描述
自動駕駛汽車現(xiàn)在是最熱門的話題。愛好者嘗試使用樹莓派和計算機視覺技術(shù)制作它們。這是一種方法。制造自動駕駛汽車的另一種更簡單的方法是線路跟隨器、路徑跟隨器、迷宮求解機器人。這種機器人遵循在特定環(huán)境的地板上繪制的特定顏色線。我們可以使用相機或紅外傳感器制作它們。如果我說我不想在地板上畫任何線,我希望它在隱形線上運行。這實際上是我在這里所做的。這個虛擬迷宮解算器/路徑跟隨機器人遵循來自遠程 PC 的路徑。所以機器人沒有任何傳感器,它只是從 PC 獲取坐標——另一個軟件機器人試圖解決難題——硬件機器人/汽車的移動方式與軟件機器人汽車的移動方式相同。現(xiàn)在讓我分享一下我是如何做到這一點的。
部分:
硬件 -
- 電機 - 4x
- 車輪(與電機兼容) - 4x
- HC05 藍牙模塊(發(fā)送/接收數(shù)據(jù)) - 1x
- 我制作的多功能機器人PCB(點此查看)- 1x
- 一些公母頭針
- 焊線(在PCB上焊接東西)
使身體 -
- PVC 板(您可以使用任何板甚至紙張,我喜歡使用它們)
- 熱膠和膠槍
軟件 -
- Arduino.ide
- Python3(別擔心,我會指導如何安裝)
而已。現(xiàn)在讓我們看看一切將如何運作。
原則(一切如何運作)
很簡單,機器人將是一輛藍牙控制的機器人汽車。python代碼將在計算機上加載地圖/迷宮并嘗試解決它。硬件機器人將使用藍牙從 Python 程序中獲取數(shù)據(jù)并相應地移動。
python程序?qū)⑼ㄟ^比較顏色值來查找路徑。我們的地圖將包含白色路徑。只要有一個白色像素,軟件汽車就會前進,硬件機器人也會前進。現(xiàn)在讓我們來吧。
制作機器人底盤
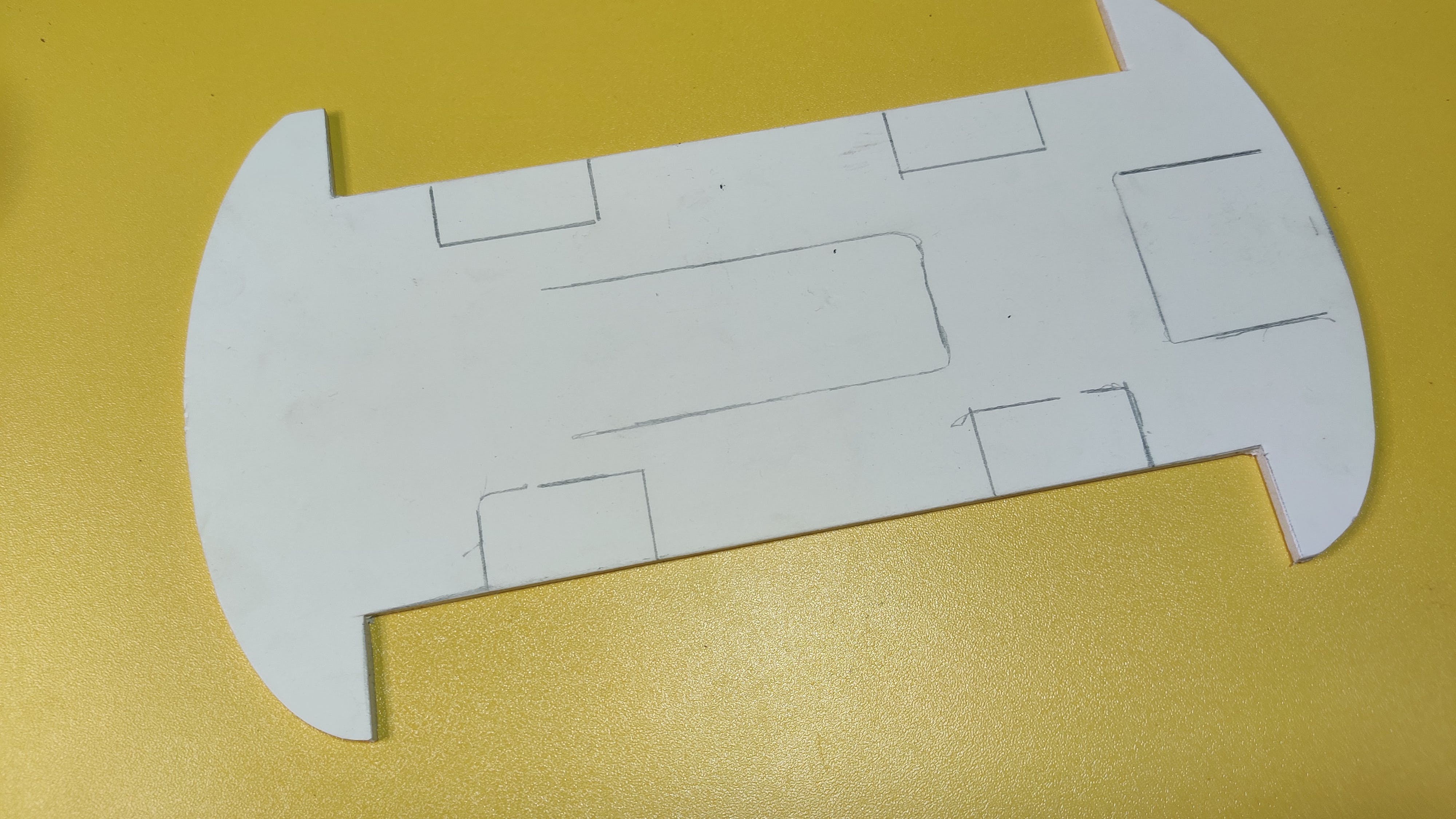
我拿了兩張PVC片材,根據(jù)我的需要剪下來。你想怎么做是你的選擇。切割板/床單后,我放置電機,用適當?shù)碾娋€連接它們。同一側(cè)的兩個電機作為一個電機,因此它們連接在一起。在圖 6 中,我使用了一些母對母跳線將電機控制引腳連接到 PCB。之后,我添加了兩個藍色 PVC 件來裝飾車身并連接輪子。
電路圖和PCB
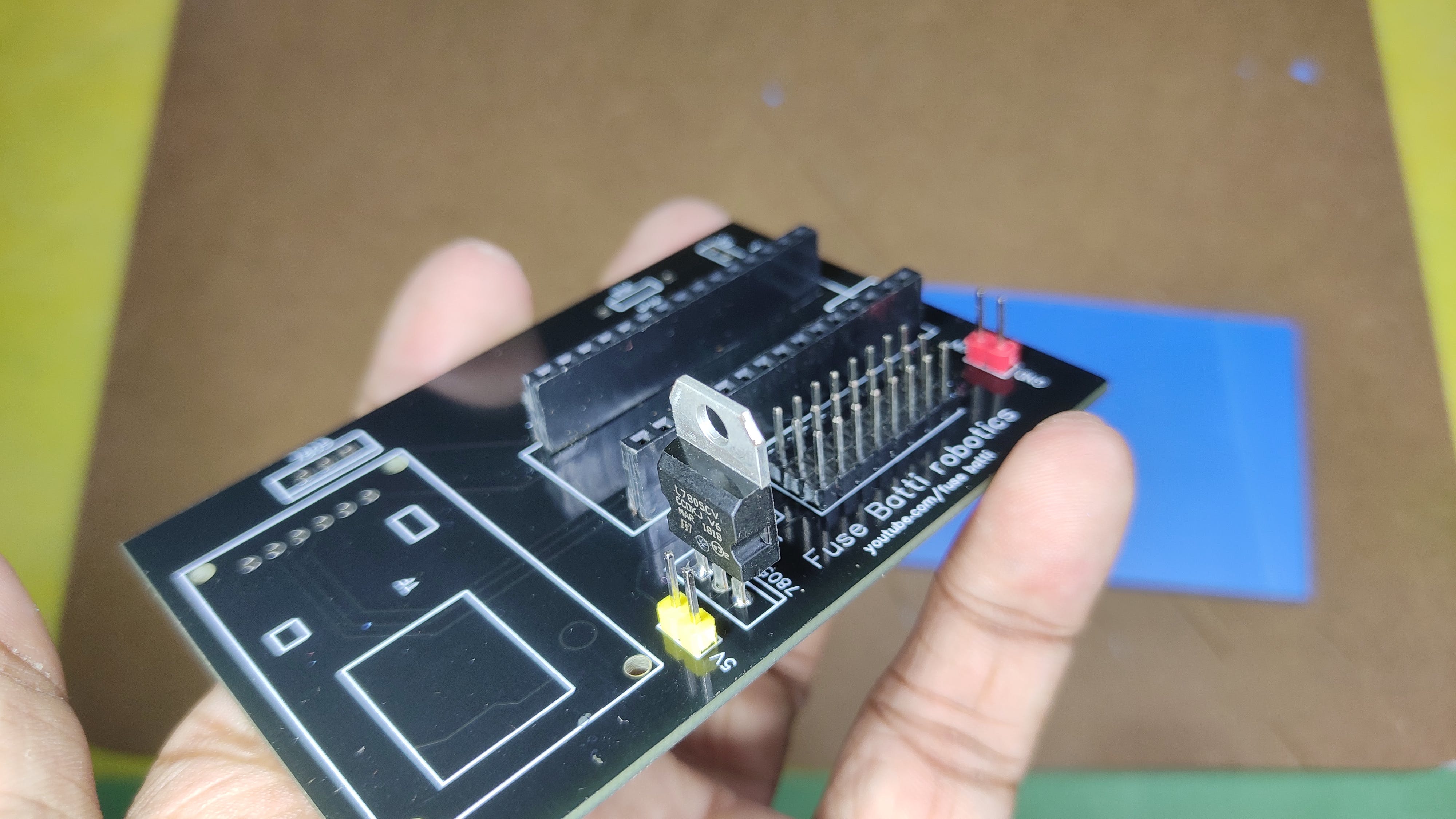
我使用EasyEDA 設計了電路。這很簡單,我留下了除了 A4、A5(用于 I2C 通信)之外的所有模擬引腳,并添加了 SD 卡讀卡器、藍牙模塊和 Arduino nano 的位置。藍牙模塊由跳線隔開(上傳數(shù)據(jù)時,我們需要斷開它)。我們不需要電阻,因為 Arduino 只會接收數(shù)據(jù),不會寫入。
之后,我從PCBWay.com 打印了 PCB。我發(fā)現(xiàn)他們的服務非常令人印象深刻。由于他們以更少的錢提供優(yōu)質(zhì)產(chǎn)品,我更喜歡將他們的服務用于我的 PCB。我去了pcb快速訂購并上傳了gerber文件。一切都是由網(wǎng)站自動完成的。在他們的工程師檢查了我的 PCB 后,我在 3 天內(nèi)付款并將它們從中國運到孟加拉國。質(zhì)量令人驚嘆,阻焊層,線條,玻璃般的外觀一如既往地讓我感到驚訝。
從這里獲取 PCB 。
連接:
我連接了
- 左電機至 D5、D6
- 右電機至 D3、D4
藍牙模塊連接在專用端口上,但要準確
- VCC 至 5v
- 接地到接地
- 發(fā)送到 Arduino Rx
- Rx 到 Arduino Tx
你發(fā)什么,我收什么。所以Arduino的接收引腳(Rx)連接到藍牙模塊發(fā)送引腳(Tx)。
之后,從電機驅(qū)動模塊為 PCB 供電。我總是喜歡在我的機器人項目中使用 7.4V 電源。兩個鋰電池就可以完成這項工作。3.7+3.7=7.4V,非常適合此類項目。
所以現(xiàn)在我們的藍牙機器人已經(jīng)準備好了。下一步是對其進行編程。
編程1:Arduino代碼
現(xiàn)在是時候?qū)⒊绦蛏蟼鞯綑C器人了。由于藍牙模塊連接在硬件串行上,我在上傳代碼之前拔下了跳線。
首先,我定義了電機連接的引腳 -
// Declare motor pins
// motors of same side work as one
// so we can consider both as one.
int rightMotor1 = 2; // right side
int rightMotor2 = 3;
int leftMotor1 = 5; // left side
int leftMotor2 = 6;
然后我在 setup() 函數(shù)中將電機引腳聲明為輸出 -
// Set pin modes
pinMode(rightMotor1, OUTPUT);
pinMode(rightMotor2, OUTPUT);
pinMode(leftMotor1, OUTPUT);
pinMode(leftMotor2, OUTPUT);
然后我初始化串行通信以從藍牙模塊接收數(shù)據(jù) -
// Initialize serial communication
Serial.begin(9600);
它檢查藍牙模塊所連接的串行端口的字節(jié)數(shù)據(jù)。
// Variable to store received data
byte command;
// Get command data from bluetooth serial port
command = Serial.read();
如果它收到 -
- 'f' 前進
- 'b' 向后
- l' 代表左和
- 'r' 表示正確的動作
每個電機都有兩個引腳。如果我們需要將它們運行到一個方向,我們需要將一個引腳設為高電平,另一個引腳設為低電平。如果它們同時為高或低,電機將不會旋轉(zhuǎn)。請參閱此示例以將汽車向前移動 -
if (command == 'f'){
// indicates forward motion
digitalWrite(rightMotor1, HIGH);
digitalWrite(rightMotor2, LOW);
digitalWrite(leftMotor1, HIGH);
digitalWrite(leftMotor2, LOW);}
通過這種組合,我們可以使機器人工作。
從 github 下載代碼或從下面復制。我更喜歡下載以避免錯誤。
/* ** Virtual Path Following Robot *
* Robot Actuator's program
*
* This robot takes commands from a python program
* and follows those commands. This robot demonstrates
* virtual path following robots and it's scopes.
*
* *********** License: GPL3+ *************
* You should receive a copy of the license
* with this program.
*
* (c) author: ashraf minhaj
* mail : [email protected]
*
* Tutorial for this project:
* http://youtube.com/fusebatti
* http://ashrafminhajfb.blogspot.com
*
* written on 15th Feb 2021
*/
// Declare motor pins
// motors of same side work as one
// so we can consider both as one.
int rightMotor1 = 2; // right side
int rightMotor2 = 3;
int leftMotor1 = 5; // left side
int leftMotor2 = 6;
// Variable to store received data
byte command;
void setup() {
// Set pin modes
pinMode(rightMotor1, OUTPUT);
pinMode(rightMotor2, OUTPUT);
pinMode(leftMotor1, OUTPUT);
pinMode(leftMotor2, OUTPUT);
// Initialize serial communication
// at 9600 buad rate
// sender/python code will also use
// the same buad
Serial.begin(9600);
}
void loop() {
// Get command data from bluetooth serial port
command = Serial.read();
// Decide which way to go based on received data
if (command == 'f'){
// indicates forward motion
digitalWrite(rightMotor1, HIGH);
digitalWrite(rightMotor2, LOW);
digitalWrite(leftMotor1, HIGH);
digitalWrite(leftMotor2, LOW);
}
if (command == 'b'){
// Backward motion
digitalWrite(rightMotor1, LOW);
digitalWrite(rightMotor2, HIGH);
digitalWrite(leftMotor1, LOW);
digitalWrite(leftMotor2, HIGH);
}
if (command == 'r'){
// Right turn
digitalWrite(rightMotor1, LOW);
digitalWrite(rightMotor2, HIGH);
digitalWrite(leftMotor1, HIGH);
digitalWrite(leftMotor2, LOW);
}
if (command == 'l'){
// Left turn
digitalWrite(rightMotor1, HIGH);
digitalWrite(rightMotor2, LOW);
digitalWrite(leftMotor1, LOW);
digitalWrite(leftMotor2, HIGH);
}
if (command == 's'){
// Stops the robot/car
digitalWrite(rightMotor1, LOW);
digitalWrite(rightMotor2, LOW);
digitalWrite(leftMotor1, LOW);
digitalWrite(leftMotor2, LOW);
}
}
現(xiàn)在使用 Arduino.ide 上傳代碼并繼續(xù)下一步。
Programmin2:Python 代碼
我想你的電腦上安裝了 python。如果沒有,請轉(zhuǎn)到并安裝最新的穩(wěn)定版 python。我使用 Python3.7.1,因為我發(fā)現(xiàn)它最穩(wěn)定。在下載下載可執(zhí)行安裝程序時,雙擊它進行安裝,然后單擊“將python添加到環(huán)境變量路徑”框,否則您將陷入災難。
無論如何,現(xiàn)在讓我們談談python程序。
我需要這個程序的兩個庫,pygame 和 pySerial。我像這樣從命令提示符安裝它們 -
$ pip install pygame
$ pip install pySerial
您在頂部看到的兩個圖像是迷宮和軟件汽車。python程序讀取它們-
bg = pygame.image.load("track1.png")
car = pygame.image.load("car.png")
要將數(shù)據(jù)從 PC 發(fā)送到 Arduino 藍牙,我首先將藍牙模塊連接到我的 PC。步驟是 -
- 打開藍牙
- 轉(zhuǎn)到控制面板>設備管理器
- 搜索新設備
- 使用密碼添加設備 (HC05) [默認密碼為“0000”或“1234”]
而已。然后單擊設備屬性以獲取端口號。在 HC05 中,在 py PC 中它位于“COM8”中。所以python像這樣連接 -
PORT = "COM8"
BUADRATE = 9600
robot = serial.Serial(PORT, BUADRATE) # connect robot
為了讓機器人先檢查周圍環(huán)境,我找到了汽車的中心,然后檢查了周圍環(huán)境——
# find the center of the car and draw a point on that
center_x, center_y = (int(car_x + 40 /2), int(car_y + 40 / 2))
代碼的其余部分是檢查周圍環(huán)境并轉(zhuǎn)動或移動汽車。如果它向前或任何方向,它會通過這樣的串行端口(字節(jié)數(shù)據(jù))將該數(shù)據(jù)發(fā)送到 Arduino -
# start the robot
robot.write(b'f')
# turn left
robot.write(b'l')
現(xiàn)在從 github 下載完整代碼或從下面復制 -
"""
** Virtual Path Follower Robot **
License: GPL3
You should receive a copy of license with this program.
(c) author: ashraf minhaj
mail : [email protected]
Written on 15th Feb 2021
"""
""" install -
$ pip install pygame
$ pip install pySerial
"""
# import library
import pygame
import serial
from time import sleep
# robot port and buadrate
# change these according to your need
PORT = "COM8"
BUADRATE = 9600
# initialize things
pygame.init()
robot = serial.Serial(PORT, BUADRATE) # connect robot
# create window with size (our image size)
window = pygame.display.set_mode((700,400)) # track 1
#window = pygame.display.set_mode((1155,399)) # track 2
# load image file
bg = pygame.image.load("track1.png")
#bg = pygame.image.load("track2.png")
car = pygame.image.load("car.png")
car = pygame.transform.scale(car, (40, 40)) # resize car image
""" main loop varibales and things """
# set up timer clock
clock = pygame.time.Clock()
# initial x y axis position of the car
car_x = 30
car_y = 260
JUMP_VALUE = 25 # turning point value
direction = 'y_up' # cars current direction
run = 1
# start the robot
robot.write(b'f')
DELAY = .400
# main loop
while run:
clock.tick(30) # update the window/run loop by this speed
#check for events
for event in pygame.event.get():
# quit button clicked
if event.type == pygame.QUIT:
run = 0
# position images
window.blit(bg, (0, 0)) # load the track image
window.blit(car, (car_x, car_y)) # the car image
# record last x, y pos of car
last_x, last_y = car_x, car_y
# find the center of the car and draw a point on that
center_x, center_y = (int(car_x + 40 /2), int(car_y + 40 / 2))
pygame.draw.circle(window, (0,255,255), (center_x, center_y), 5, 5)
# check surrounding (4 direction data)
# the calibration value is the pixel from car's sensor/mid point
# so it checks for road info 30 pixels far from the sensor.
# 255 means we have a clear white road
cal_value = 30 # calibrate this to get good data
y_up = window.get_at((center_x, center_y - cal_value))[0]
y_down = window.get_at((center_x, center_y + cal_value))[0]
x_right = window.get_at((center_x + cal_value, center_y))[0]
x_left = window.get_at((center_x - cal_value, center_y))[0]
#print("y_up ", y_up)
#print("y_down ", y_down)
#print("x_right", x_right)
#print("x_left ", x_left)
#print("-----------")
# determine which way to go
# go up
if y_up == 255 and direction == 'y_up' and x_left != 255 and x_right != 255:
# move up
car_y -= 2 # decrease pixel and move the car on y axis
# make the turn
if y_up == 255 and direction == 'y_up' and x_left != 255 and x_right == 255:
# make a right turn
direction = 'x_right'
car_y -= JUMP_VALUE
car_x += JUMP_VALUE
car = pygame.transform.rotate(car, -90)
window.blit(car, (car_x, car_y))
print('Turn Right')
robot.write(b'r')
sleep(DELAY)
robot.write(b'f')
# go x right
if y_up != 255 and direction == 'x_right' and y_down != 255 and x_right == 255:
car_x += 2
if y_down == 255 and direction == 'x_right' and x_left == 255 and x_right == 255:
# make a turn from x_right
car = pygame.transform.rotate(car, -90)
direction = 'y_down'
car_y += JUMP_VALUE + 5
car_x += JUMP_VALUE
window.blit(car, (car_x, car_y))
print('Turn Right')
robot.write(b'r')
sleep(DELAY)
robot.write(b'f')
# go y down
if y_down == 255 and direction == 'y_down' and x_left != 255 and x_right != 255:
# move down
car_y += 2
# left turn
if y_down == 255 and direction == 'y_down' and x_left != 255 and x_right == 255:
# turn from y_down
car = pygame.transform.rotate(car, 90)
direction = 'x_right'
car_y += JUMP_VALUE
car_x += JUMP_VALUE
print('Turn left')
robot.write(b'l')
sleep(DELAY)
robot.write(b'f')
# turn to y up
if y_up == 255 and direction == 'x_right' and x_left == 255 and x_right == 255:
# turn from y_down
car = pygame.transform.rotate(car, 90)
direction = 'y_up'
car_y -= JUMP_VALUE + 5
car_x += JUMP_VALUE
print('Turn left')
robot.write(b'l')
sleep(DELAY)
robot.write(b'f')
# if car is stopped
if car_x == last_x and car_y == last_y:
# stop the engine sound
print("STOPPED")
robot.write(b's')
pygame.display.update() # update the window
pygame.quit() #close everything
通電,我們走吧
我使用兩節(jié) 18650 電池為機器人供電。然后運行 ??Python 程序。它的表現(xiàn)如何?你可以在視頻中看到。
這個機器人最好的部分是你不需要不時更改機器人的代碼。您只需要相應地更改 python 程序。而已。
未來范圍:
該機器人可用于帶有一些板載傳感器的行業(yè),以確定錯誤或滑出路徑并避開障礙物。天空是極限,你的大腦是主人。
謝謝你。
- AI解迷宮機器人
- 檢測機器人開源分享
- 坦克機器人開源分享
- 掃地機器人開源資料 44次下載
- 機器人守衛(wèi)開源分享
- 英雄機器人開源
- 機器人開源案例
- 赫伯特機器人虛擬寵物開源分享
- 基于DSP和PC的農(nóng)業(yè)機器人控制系統(tǒng) 18次下載
- 競賽機器人制作技術(shù)PDF電子書免費下載 46次下載
- 面向ABB IRB4600機器人的虛擬示教系統(tǒng)研究 2次下載
- 機器人的虛擬監(jiān)控技術(shù)系統(tǒng)設計研究 19次下載
- 基于LPC1114的迷宮機器人的設計與實現(xiàn) 13次下載
- 基于ARM的機器人走迷宮控制系統(tǒng)與算法設計 27次下載
- 基于虛擬監(jiān)控技術(shù)的機器人系統(tǒng) 10次下載
- 字節(jié)發(fā)布機器人領(lǐng)域首個開源視覺-語言操作大模型,激發(fā)開源VLMs更大潛能 561次閱讀
- 機器人技術(shù)中常用的路徑規(guī)劃算法的開源庫 1188次閱讀
- 工業(yè)機器人虛擬仿真軟件簡述 6148次閱讀
- 面對疫情 醫(yī)療機器人能幫上什么忙? 2236次閱讀
- dfrobotSparki機器人套裝簡介 2207次閱讀
- 工業(yè)機器人編程入門_工業(yè)機器人的編程要求 9787次閱讀
- 醫(yī)用機器人的定義_醫(yī)用機器人發(fā)展 3257次閱讀
- 醫(yī)用機器人的功能_醫(yī)用機器人分類 2462次閱讀
- 協(xié)作機器人的起源_為什么需要協(xié)作機器人 8322次閱讀
- 如何區(qū)分機器人、協(xié)作機器人和移動機器人? 7029次閱讀
- 軟體機器人 前所未見的機器人 3770次閱讀
- 機器人的最佳編程語言是什么?機器人十大流行編程語言匯總 3.5w次閱讀
- 工業(yè)機器人虛擬仿真軟件是一個很好的工業(yè)機器人入門途徑 3.4w次閱讀
- 機器人系統(tǒng)常用仿真軟件介紹和效果 8633次閱讀
- 工業(yè)機器人虛擬樣機系統(tǒng)的研究 1455次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1貼片三極管上的印字與真實名稱的對照表詳細說明
- 0.50 MB | 76次下載 | 1 積分
- 2Altium Designer AD 25 軟件安裝包下載
- 0.00 MB | 3次下載 | 免費
- 3Altium Designer 23 軟件下載
- 0.00 MB | 2次下載 | 免費
- 4Altium Designer 22.11.1軟件安裝包下載
- 0.00 MB | 1次下載 | 免費
- 5PADS Professional vx 2.11 安裝包
- 0.00 MB | 1次下載 | 5 積分
- 6高頻率變壓器的設計
- 0.03 MB | 1次下載 | 1 積分
- 7ANT8817 1%3.5W/3.7V,同步自適應升壓,超長續(xù)航,H類防破音單聲道音頻功放中文手冊
- 1.11 MB | 1次下載 | 免費
- 8NS6326 4-30V輸入5V/3A輸出同步降壓穩(wěn)壓器中文手冊
- 1.22 MB | 次下載 | 免費
本月
- 1蘇泊爾電磁爐線路的電路原理圖資料合集
- 2.02 MB | 286次下載 | 5 積分
- 2長虹液晶電視R-HS310B-5HF01的電源板電路原理圖
- 0.46 MB | 87次下載 | 5 積分
- 3貼片三極管上的印字與真實名稱的對照表詳細說明
- 0.50 MB | 76次下載 | 1 積分
- 4U盤一鍵制作
- 23.84 MB | 41次下載 | 免費
- 5AI智能眼鏡產(chǎn)業(yè)鏈分析
- 4.43 MB | 39次下載 | 免費
- 6AO4803A雙P通道增強型場效應晶體管的數(shù)據(jù)手冊
- 0.11 MB | 28次下載 | 2 積分
- 7長虹液晶彩電LS29機芯的技術(shù)資料說明
- 3.42 MB | 16次下載 | 2 積分
- 8TP4055 500mA線性鋰離子電池充電器中文手冊
- 0.75 MB | 9次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935127次下載 | 10 積分
- 2開源硬件-PMP21529.1-4 開關(guān)降壓/升壓雙向直流/直流轉(zhuǎn)換器 PCB layout 設計
- 1.48MB | 420064次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233089次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費下載
- 340992 | 191387次下載 | 10 積分
- 5十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183342次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81586次下載 | 10 積分
- 7Keil工具MDK-Arm免費下載
- 0.02 MB | 73815次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65988次下載 | 10 積分





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論