 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
描述
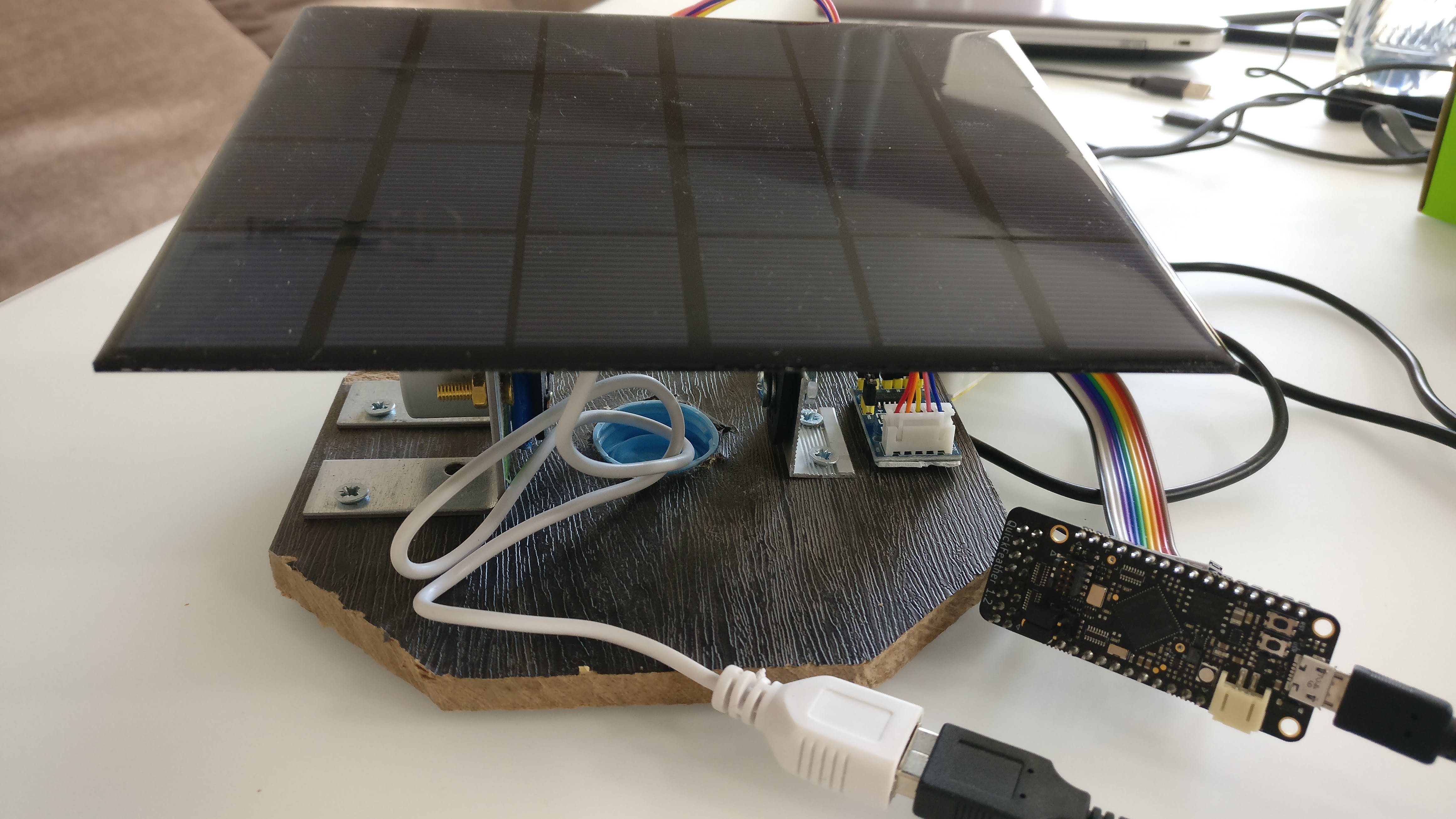
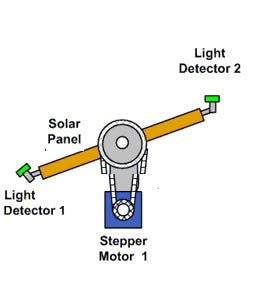
為了拯救我們的星球,需要使用更多的收入能源,如太陽能。我制作了原型太陽能跟蹤器,它可以讓我們更有效地產生能量。
固定傾斜角度太陽能電池陣列產生的電力全天效率較低,因為太陽能電池陣列并非始終直接面向太陽(最佳角度)。太陽在赤道上每小時從東向西移動 15 度。陽光入射和太陽能電池板朝向之間的角度差越大,基于余弦公式的損失越大。
其次,由于地球自轉軸的傾斜,太陽全年橫穿赤道南北方向也有±23.5°的變化。即使面對最佳角度的固定陣列也會有輕微的損失。
制作底盤
開始我們的工作 will make Base.

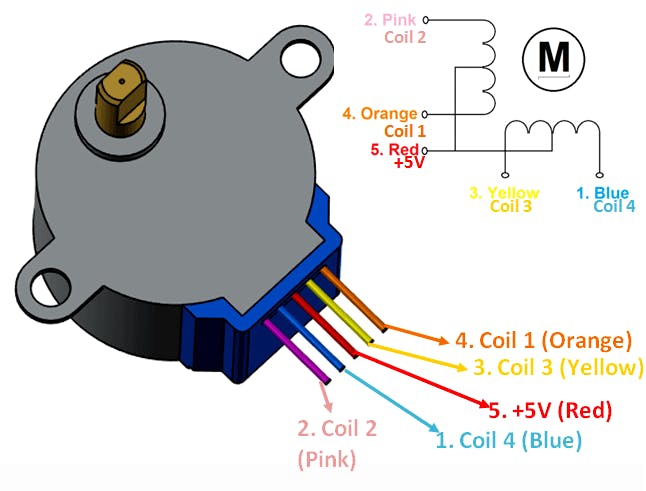
連接電機

我們在電機和支架之間進行連接
安裝支架

結果:
程序和插件sheme部分。
1.步進電機控制。
我在 ULN2003 上使用帶有電源驅動器的 28BYJ 48 5V。
了解算法控制的,我們將在電機方案里面看到:
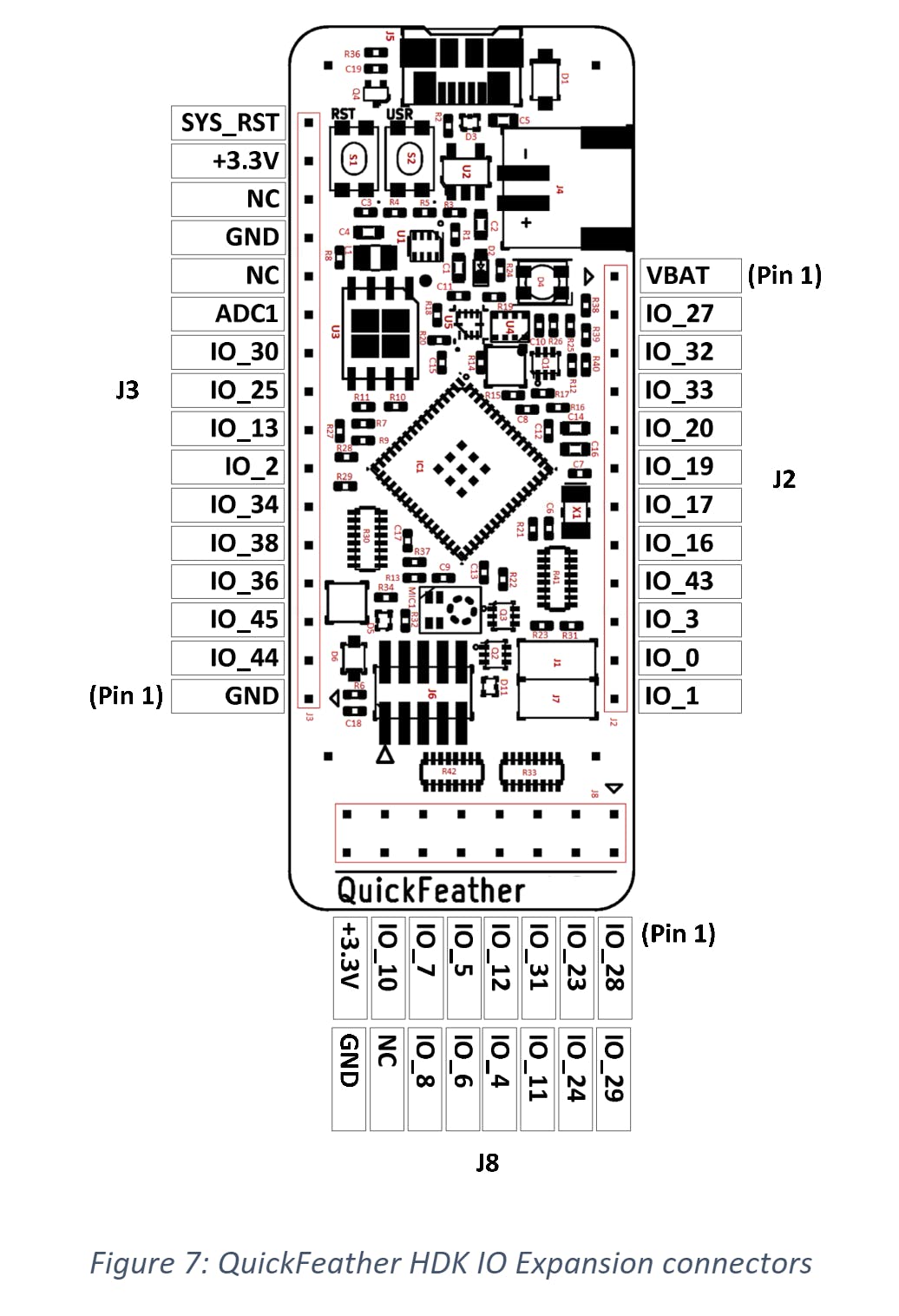
對于控制,我在 QuckFeather 板上選擇了引腳:
IO_31 映射到 GPIO 4
IO_23 映射到 GPIO 7
IO_30 映射到 GPIO 3
IO_28 映射到 GPIO 2
對于控制步進電機,我們有三種算法:波、半步和全步。下圖:
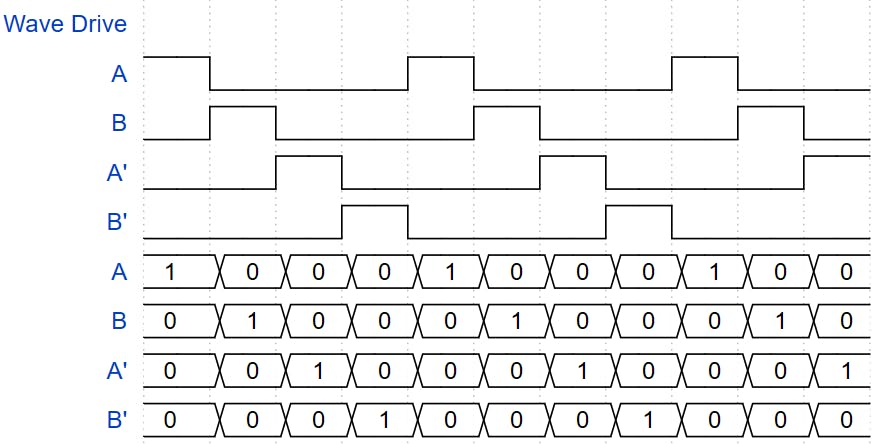
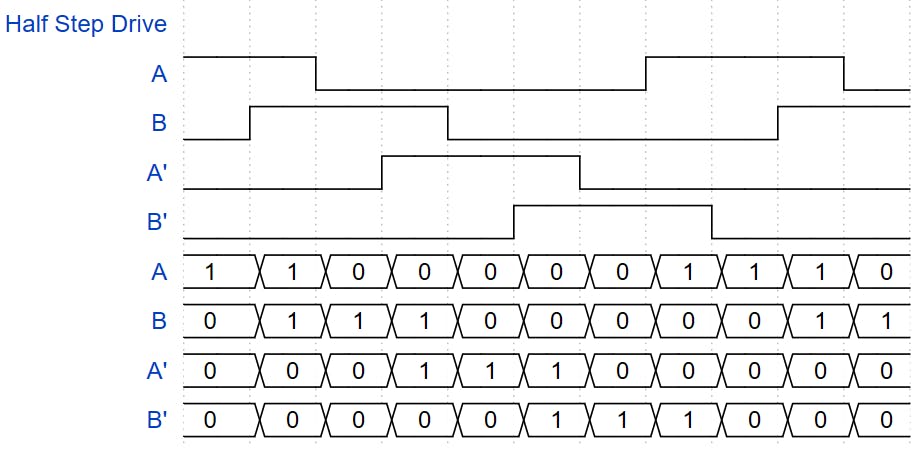
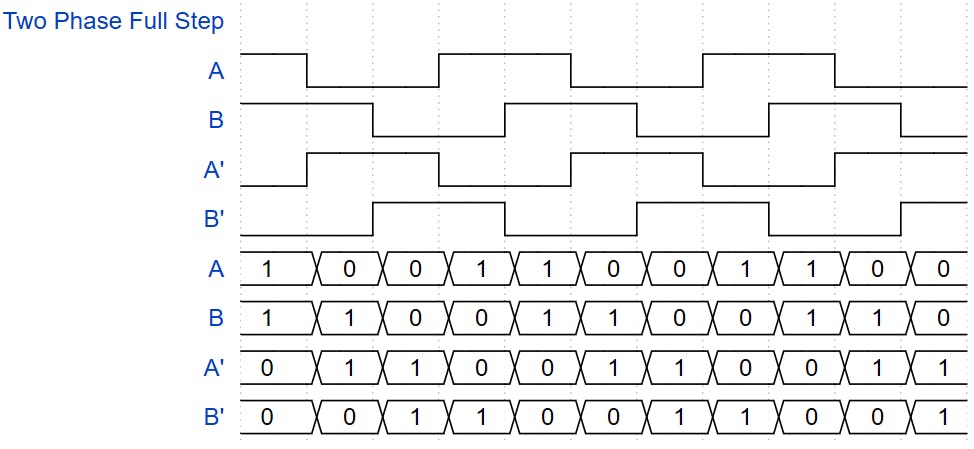
我最后選。我使用來自 gitHub qorc-sdk\qf_apps\qf_helloworldsw 的示例并對其進行修改。零件代碼 - 生成最后一張圖:
int dl = 5;
HAL_GPIO_Write(2, true);
HAL_GPIO_Write(3, false);
HAL_GPIO_Write(4, false);
HAL_GPIO_Write(7, true);
vTaskDelay(dl);
HAL_GPIO_Write(2, true);
HAL_GPIO_Write(3, true);
HAL_GPIO_Write(4, false);
HAL_GPIO_Write(7, false);
vTaskDelay(dl);
HAL_GPIO_Write(2, false);
HAL_GPIO_Write(3, true);
HAL_GPIO_Write(4, true);
HAL_GPIO_Write(7, false);
vTaskDelay(dl);
HAL_GPIO_Write(2, false);
HAL_GPIO_Write(3, false);
HAL_GPIO_Write(4, true);
HAL_GPIO_Write(7, true);
vTaskDelay(dl);
可變 dl ??- deley,改變速度旋轉步進電機。
使用引腳 IO_31、IO_23、IO_30、IO_28 我添加到 pin_cfg_table.c 添加塊每個引腳。
// Stepper motor pins
{ // setup pin steper motor
.ucPin = PAD_31,
.ucFunc = PAD31_FUNC_SEL_GPIO_4,
.ucCtrl = PAD_CTRL_SRC_A0,
.ucMode = PAD_MODE_OUTPUT_EN,
.ucPull = PAD_NOPULL,
.ucDrv = PAD_DRV_STRENGTH_4MA,
.ucSpeed = PAD_SLEW_RATE_SLOW,
.ucSmtTrg = PAD_SMT_TRIG_DIS,
},
{ // setup pin steper motor
.ucPin = PAD_23,
.ucFunc = PAD23_FUNC_SEL_GPIO_7,
.ucCtrl = PAD_CTRL_SRC_A0,
.ucMode = PAD_MODE_OUTPUT_EN,
.ucPull = PAD_NOPULL,
.ucDrv = PAD_DRV_STRENGTH_4MA,
.ucSpeed = PAD_SLEW_RATE_SLOW,
.ucSmtTrg = PAD_SMT_TRIG_DIS,
},
{ // setup pin steper motor
.ucPin = PAD_30,
.ucFunc = PAD30_FUNC_SEL_GPIO_3,
.ucCtrl = PAD_CTRL_SRC_A0,
.ucMode = PAD_MODE_OUTPUT_EN,
.ucPull = PAD_NOPULL,
.ucDrv = PAD_DRV_STRENGTH_4MA,
.ucSpeed = PAD_SLEW_RATE_SLOW,
.ucSmtTrg = PAD_SMT_TRIG_DIS,
},
{ // setup pin steper motor
.ucPin = PAD_28,
.ucFunc = PAD28_FUNC_SEL_GPIO_2,
.ucCtrl = PAD_CTRL_SRC_A0,
.ucMode = PAD_MODE_OUTPUT_EN,
.ucPull = PAD_NOPULL,
.ucDrv = PAD_DRV_STRENGTH_4MA,
.ucSpeed = PAD_SLEW_RATE_SLOW,
.ucSmtTrg = PAD_SMT_TRIG_DIS,
},
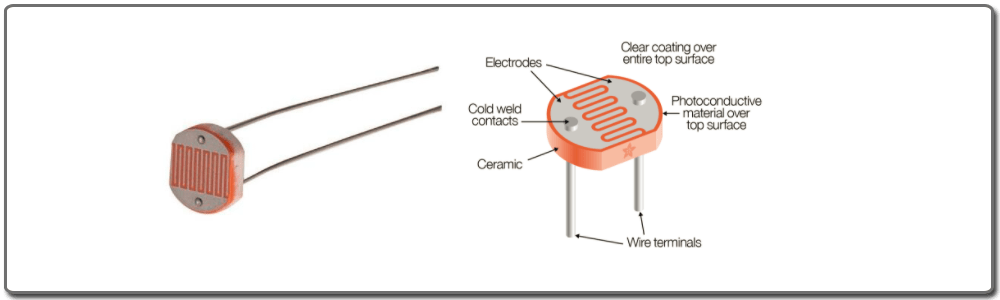
2. ADC和光電傳感器。
要獲取有關光量的數據 - 我在 QuckFeather 板上使用光敏電阻和 ADC1 輸入。
下面的光敏電阻:
對于測試使用 ADC1 轉換器,我使用該代碼:
static void checkAnalogInput(const struct cli_cmd_entry *pEntry)
{
uint16_t iCurrentBatteryLevel = 0; ///< 12-bit integer from ADC conversion unit
char snum[5];
(void)pEntry;
HAL_ADC_Init(ADC_CHANNEL_1, 1); // Enable photo measurement
HAL_ADC_StartConversion(); // start ADC conversion
vTaskDelay(25); // Conversion takes about 25ms
HAL_ADC_GetData(&iCurrentBatteryLevel); // get the ADC reading
// convert 123 to string [buf]
itoa(iCurrentBatteryLevel, snum, 10);
CLI_puts(snum);
return;
}
我將此方法添加到 main_dbg_cli qf_menu.c 表單項目 helloworldsw 中。
與控制器的連接:
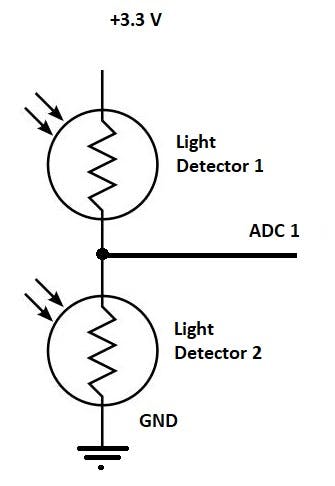
在中間點光探測器是 1.5V 這個值對于 ADC 來說很大,它可以測量 4095。我在 3.3 電源和頂部光敏電阻之間添加了二極管。這改變了工作點。
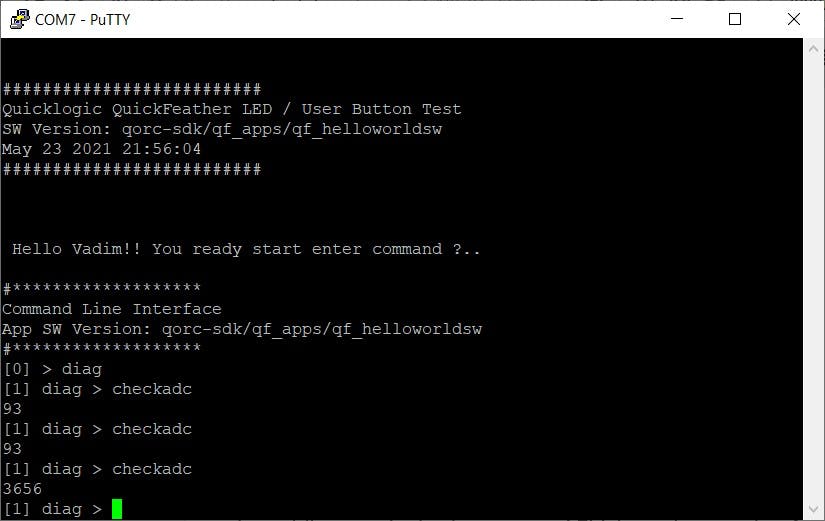
我調用函數運行 ADC - checkadc。
CLI_CMD_SIMPLE( "checkadc", checkAnalogInput, "start solar track" )
下面的例子:
為了開始跟蹤太陽能,我添加了 commad - starttrack。
CLI_CMD_SIMPLE( "starttrack", starttrack, "start solar track" )
您可以在 gitHub 中看到的代碼。
測試工作:
玻璃破碎傳感器。
太陽能電池板可能由于各種原因而損壞。我們制造傳感器碎玻璃。
我們可以使用 SensiML Data Capture Lab 和 Using SensiML Analytic Studio。并學習我們的 QuickFeather。
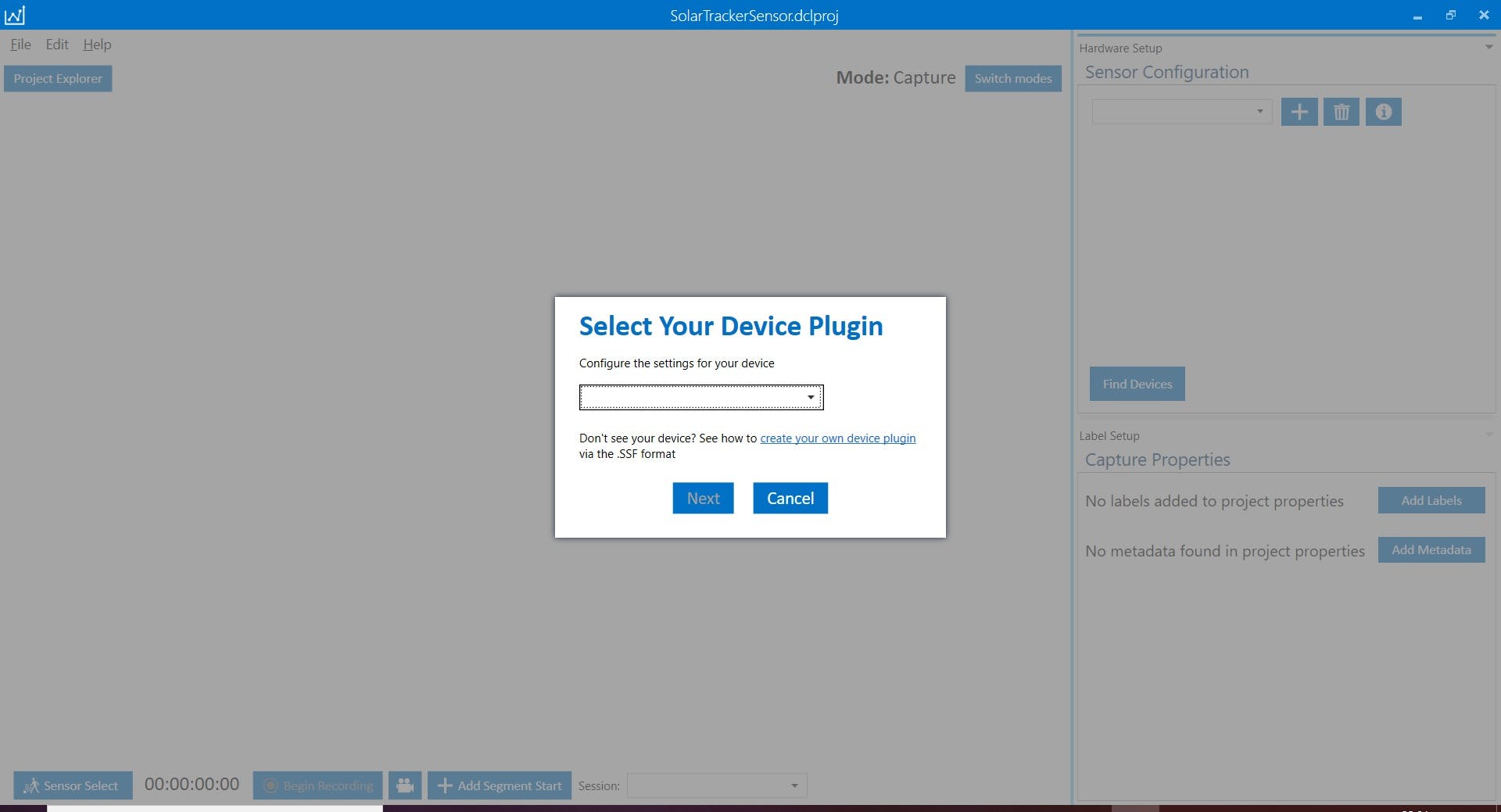
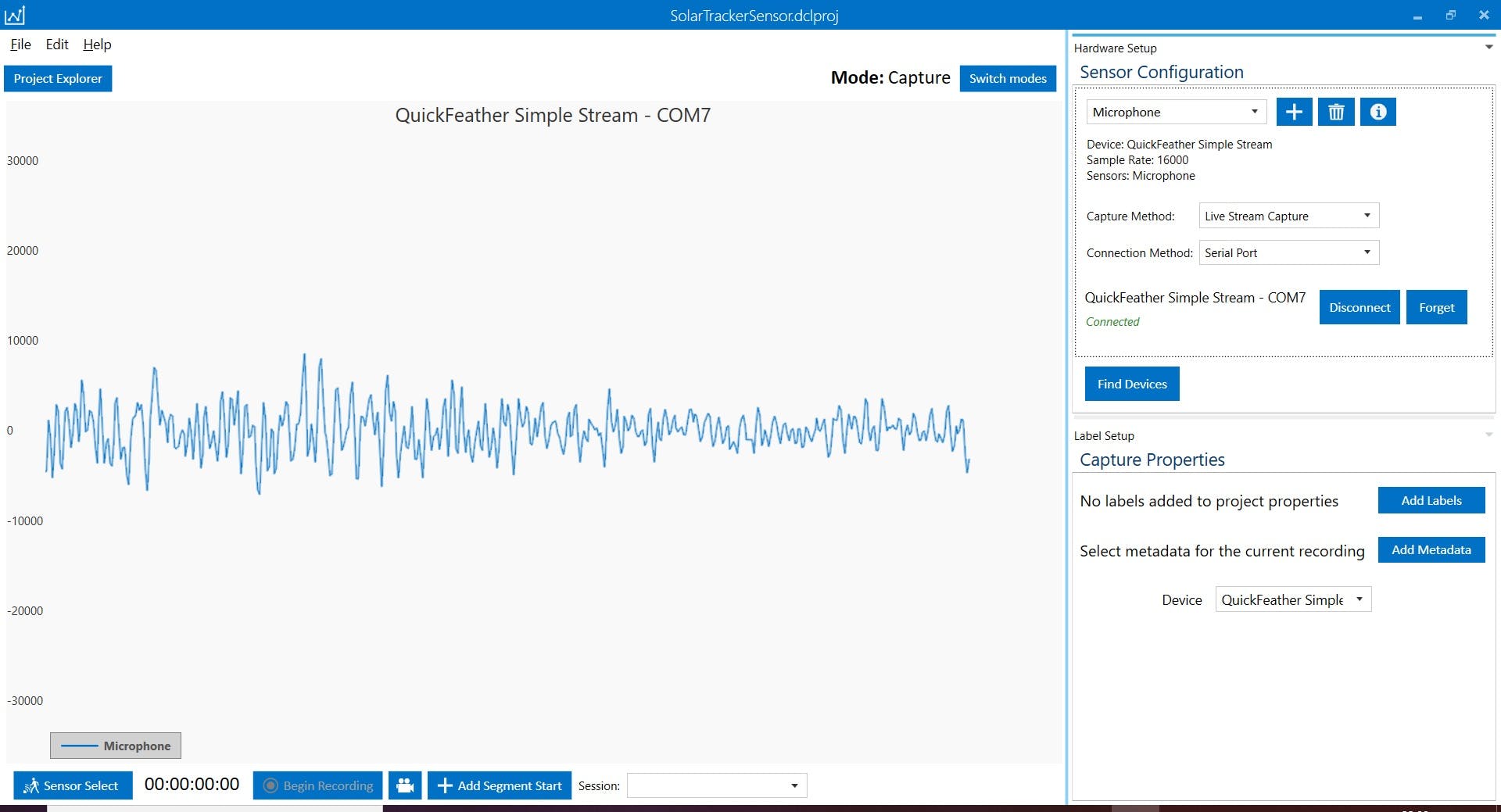
打開 SensiML 數據采集實驗室。切換到捕獲。
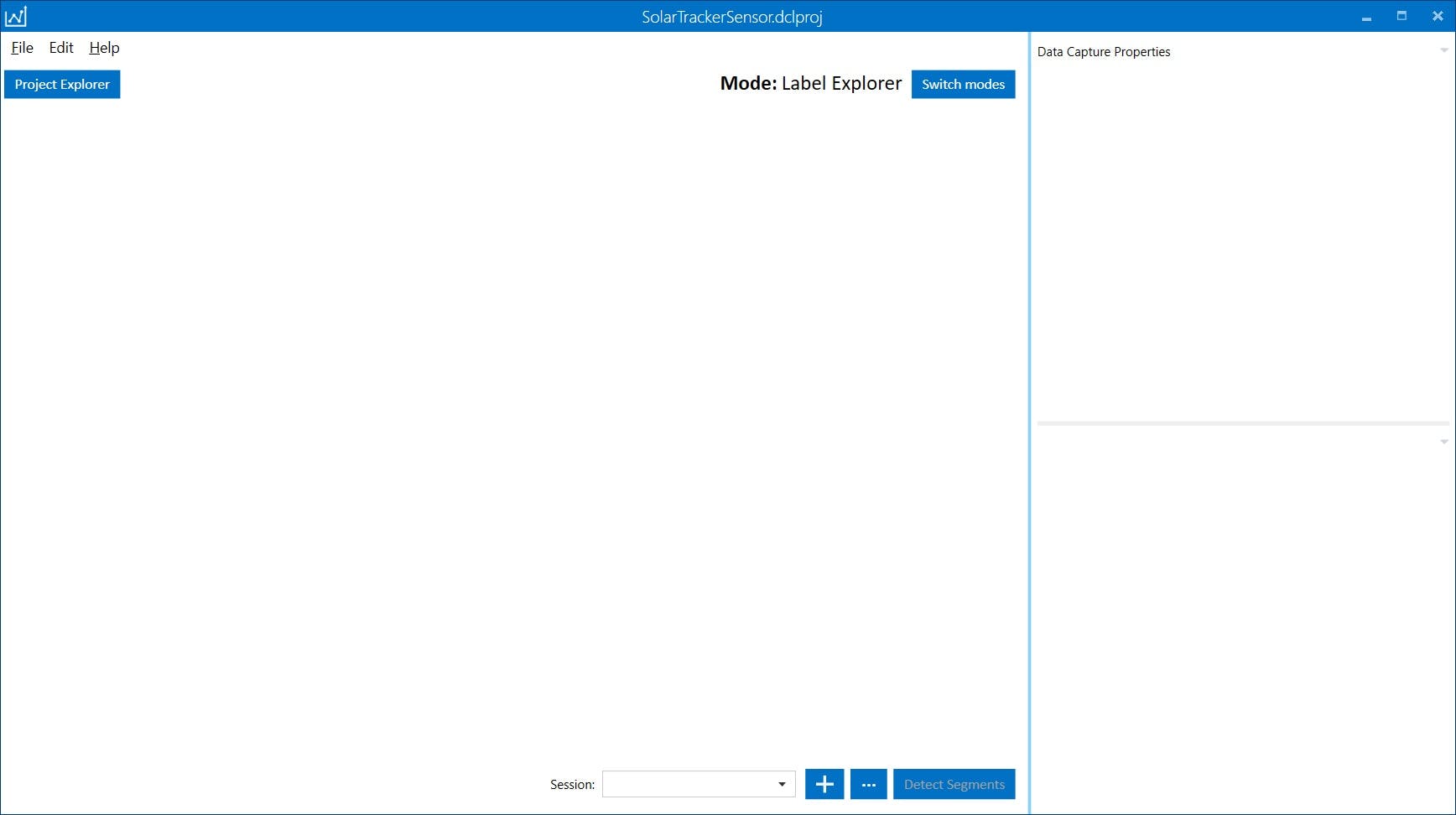
添加設備進行捕獲。選擇 QuickFeather Simple Stream,捕獲源 - 音頻,選擇復選框麥克風。我取名麥克風。接下來需要單擊按鈕 Find Devices 并在搜索后選擇編號 COM 端口。我們將看看 COM7 上的 QuickFeather Simple 流。
需要創建標簽后使用按鈕添加標簽。我添加了兩個 - 環境和碎玻璃。選擇當前標簽和捕獲信號使用按鈕Begin Recording 。
接下來切換到標簽資源管理器,您可以指定名稱會話。我打電話給 - 手動并采取模式手動。在我分開來分割之后。為此,您可以使用鼠標和右鍵。
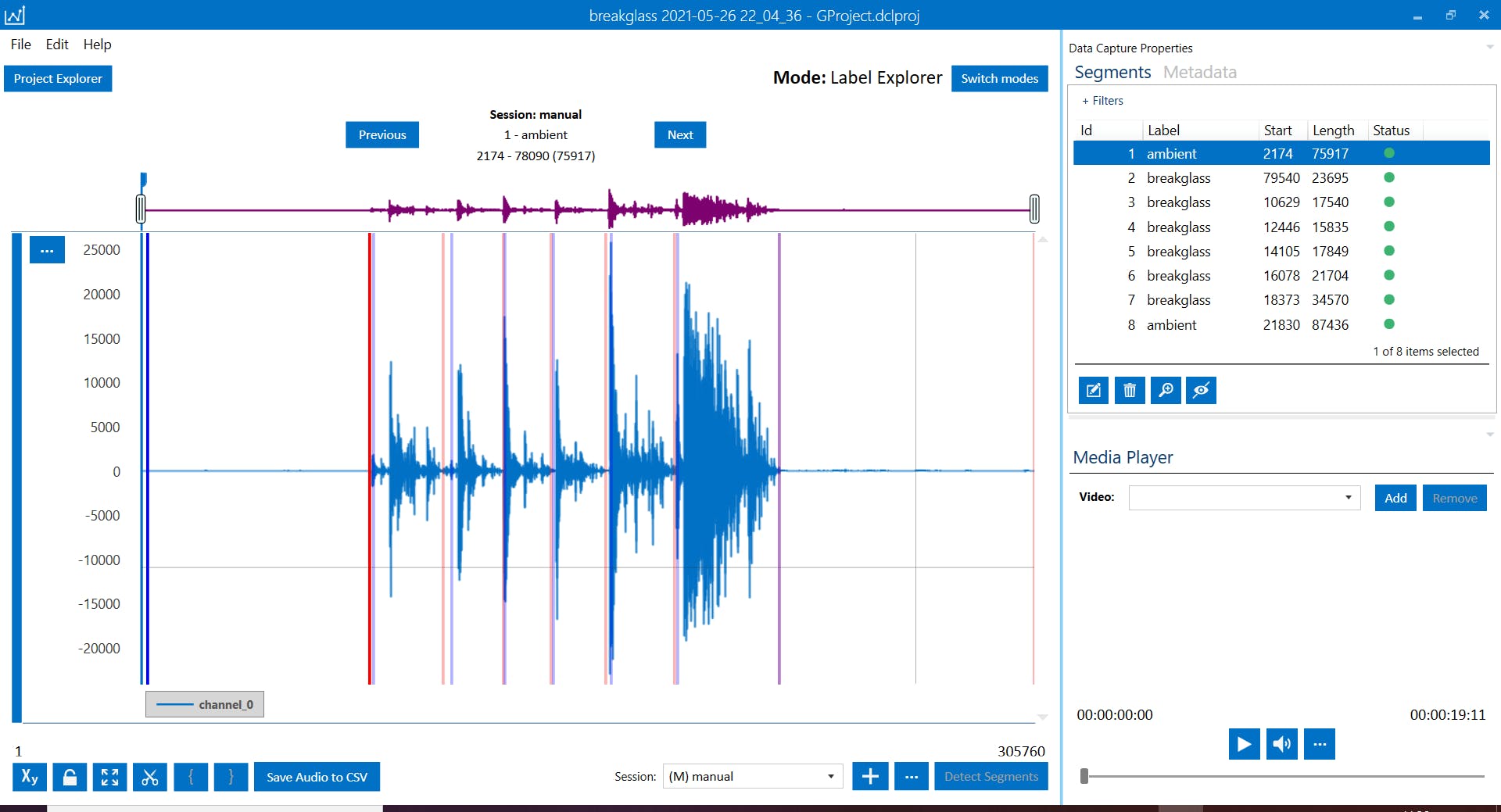
在段表中添加每個段標簽。保存項目。
在我們運行 SensiML Analytic Studio 之后。并打開我們的項目。
所有步驟都在文檔中描述,我的步驟在下面的屏幕截圖中。
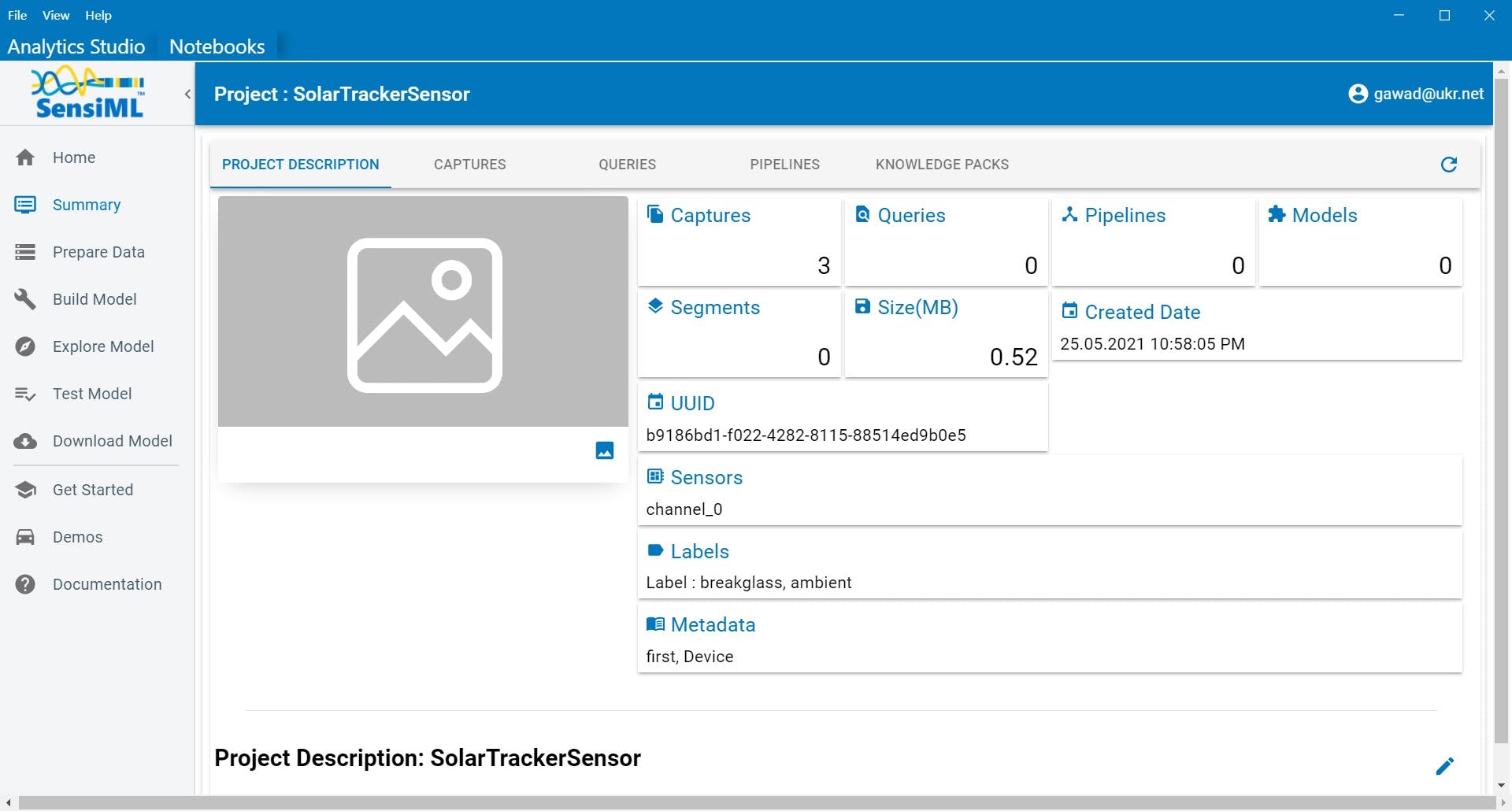
檢查我們的結果。
結論
該跟蹤器可用于自主電源,例如為農業領域的高級覆蓋網絡和偏遠地區的街道照明提供基站 Helium 網絡。
?
?
- 簡單的太陽跟蹤太陽能電池板電路 8次下載
- 使用Arduino Uno和伺服電機的太陽能陽光跟蹤器
- 超級太陽能跟蹤器開源分享
- DIY太陽能跟蹤器Arduino項目ITA
- 雙軸太陽能跟蹤器開源分享
- 基于PSoC的太陽自動跟蹤器 15次下載
- 太陽能自動跟蹤器的組成及基于ARM的太陽能發電控制系統的設計 38次下載
- 太陽能跟蹤器工作原理及其各模塊的設計 31次下載
- 太陽能跟蹤系統設計 64次下載
- 高精度太陽能聚光雙軸定時跟蹤控制系統設計 9次下載
- 太陽能跟蹤控制器報告 23次下載
- 基于單片機的雙軸太陽能跟蹤系統的設計 320次下載
- 高精度太陽能聚光雙軸定時跟蹤控制系統設計 112次下載
- PLC實現雙軸伺服太陽能跟蹤系統 169次下載
- 基于ATmega8的雙軸太陽跟蹤器設計
- 太陽能板的串并聯接線方法 4.1w次閱讀
- 工業應用太陽能跟蹤器設計方案 1656次閱讀
- DIY一個太陽能檢測器 2397次閱讀
- 簡單實用的便攜式太陽能背包改造方案 2279次閱讀
- 如何對太陽能和儲能設施進行基本監測的解決方案詳細資料概述 5636次閱讀
- 太陽能熱發電基本原理 3.8w次閱讀
- Linux跟蹤器如何選擇,學會這招就很簡單了 5242次閱讀
- 太陽能硅片生產工藝分析_太陽能硅片有輻射有毒嗎 1.5w次閱讀
- 薄膜太陽能電池前途在哪_薄膜太陽能電池有哪些 3.2w次閱讀
- 太陽能板工作的原理是什么 10.2w次閱讀
- 屋頂太陽能發電板利弊_太陽能板屋頂發電原理 7w次閱讀
- 太陽能板如何安裝_太陽能板安裝示意圖 19.4w次閱讀
- 簡單自制太陽能充電器 DIY制作教程 4.6w次閱讀
- 太陽能MPPT充電控制器 5.3w次閱讀
- 太陽能原理 7027次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1山景DSP芯片AP8248A2數據手冊
- 1.06 MB | 532次下載 | 免費
- 2RK3399完整板原理圖(支持平板,盒子VR)
- 3.28 MB | 339次下載 | 免費
- 3TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 4DFM軟件使用教程
- 0.84 MB | 295次下載 | 免費
- 5元宇宙深度解析—未來的未來-風口還是泡沫
- 6.40 MB | 227次下載 | 免費
- 6迪文DGUS開發指南
- 31.67 MB | 194次下載 | 免費
- 7元宇宙底層硬件系列報告
- 13.42 MB | 182次下載 | 免費
- 8FP5207XR-G1中文應用手冊
- 1.09 MB | 178次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33566次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅動電路設計》 溫德爾著
- 0.00 MB | 6656次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537798次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420027次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191187次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網監
工商網監
評論