 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
描述
演示
如果您是 Arduino 新手,您可以開始:
理念
主要想法是通過在基于網絡的地圖上繪制路線來控制基于步進電機的機器人,只需在移動屏幕上觸摸您的手指,機器人就可以將您的貨物運送到目的地。
在這個項目中,我制作了一輛不使用反饋傳感器的簡單汽車。因此,位置誤差會隨著時間的推移而累積。
這個項目可能會啟發人們通過使用某種反饋傳感器來糾正位置誤差來制造一個完美的搬運機器人。如果與Dijkstra算法等路由算法結合使用會更方便。
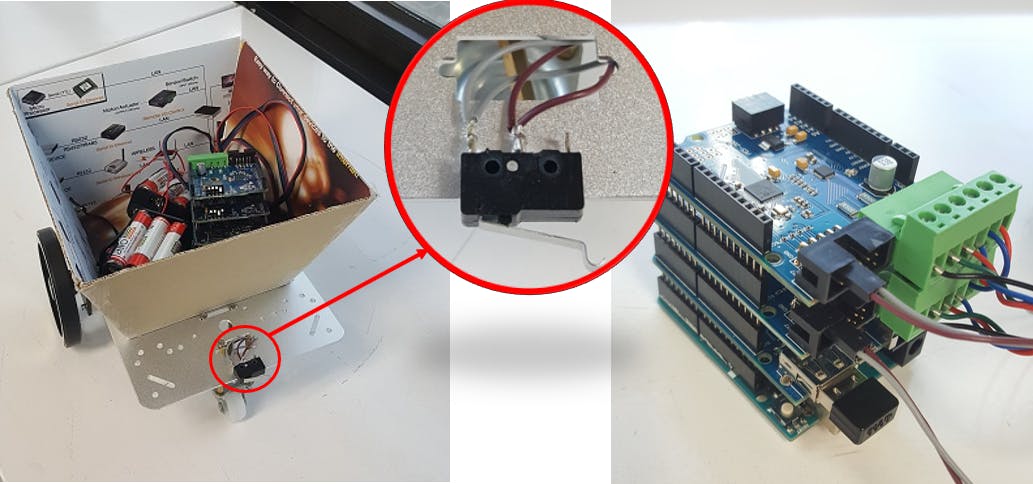
接線
- 在 Arduino 上堆疊 PHPoC Shield 或 PHPoC WiFi Shield
- 在 PHPoC Shield 或 PHPoC WiFi Shield 上堆疊兩個步進電機控制器 PES-2604
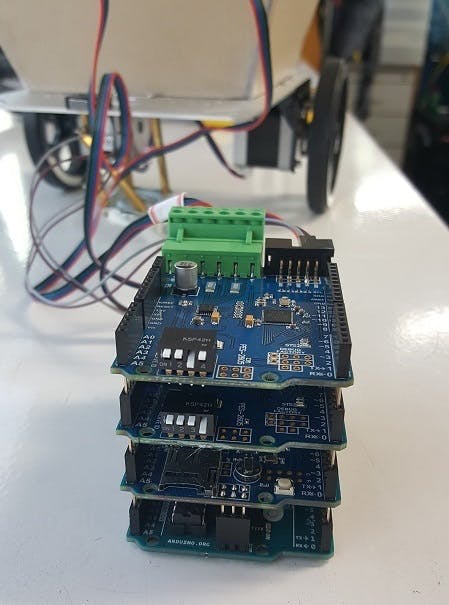
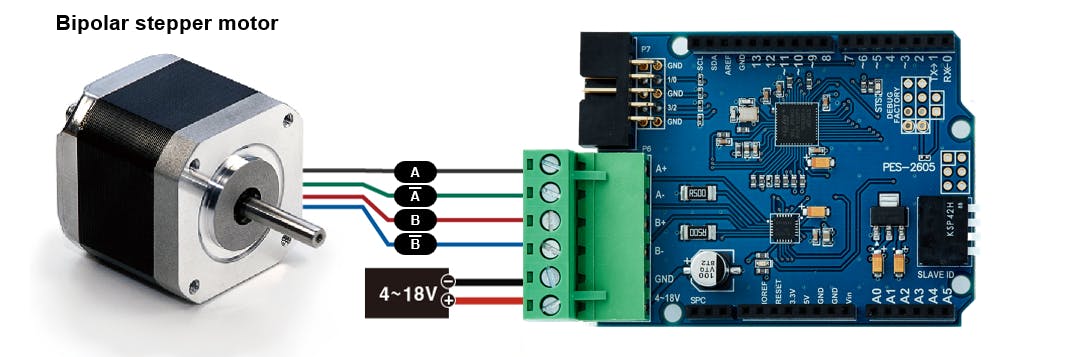
- 將步進電機連接到步進電機控制器 PES-2605 的接線端子
- 雙極步進電機
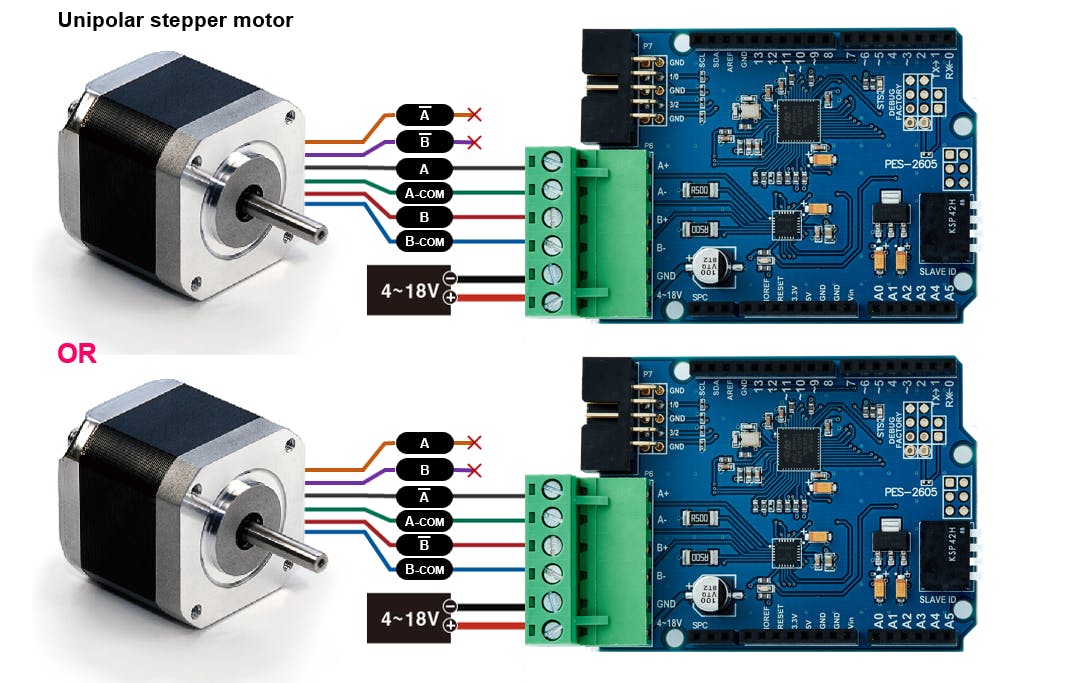
- 單極步進電機:有兩種方法可以將單極步進電機連接到 PES-2605 的接線端子上。用戶可以選擇其中之一。
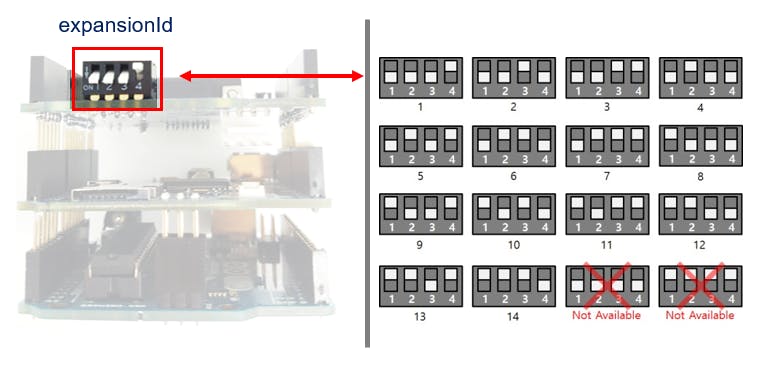
- 通過擴展板上的撥碼開關為每個步進電機控制器設置擴展 ID 為 13 和 14。您可以參考下表設置擴展 ID。
- 將限位開關連接到兩個步進電機控制器的數字輸入端口的 SW#0
這個怎么運作
我們需要一張辦公室地圖的圖像。地圖的大小必須與實際大小具有相同的縱橫比。
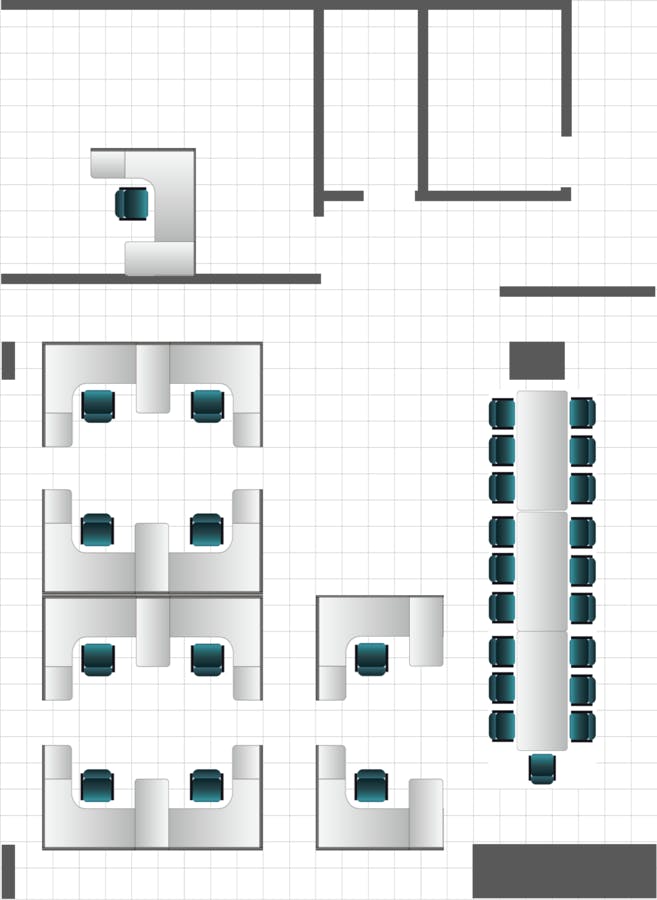
提示:如果是根據當時的地磚繪制的,繪制地圖的縱橫比會更準確。
地圖圖像被縮放以適合移動屏幕。當手指觸摸基于網絡的地圖時:
- XY坐標(以像素為單位)重新縮放為圖像的坐標,然后作為目標位置發送到Arduino。Arduino將像素坐標轉換為真實坐標(以毫米為單位)。代碼:
/* convert pixel to millimeter */targetX = (long)(targetX / RATIO_PIX_PER_MM);targetY = (long)(targetY / RATIO_PIX_PER_MM);
- Arduino 計算方向(旋轉角度)和距離基于:當前位置、先前方向和目標位置代碼:
/* calculate the rotating angle */vectorX = targetX - preX;vectorY = targetY - preY;dist = sqrt(vectorX * vectorX + vectorY * vectorY);vectorX /= dist;vectorY /= dist;cosinAngle = (preVectorX * vectorX + preVectorY * vectorY); /* based on dot product between two vectors */angle = acos(cosinAngle) * 180 / PI;
- Arduino 將旋轉角度轉換為電機必須移動的步數,并向步進電機控制器發送命令以移動電機。代碼:
stepMove = (angle * TRACK) / ((FULL_STEP_ANGLE / stepMode) * WHEEL_RADIUS) / 2;dir = preVectorX * vectorY - preVectorY * vectorX; /* direction of rotation: clockwise or counter-clockwise */
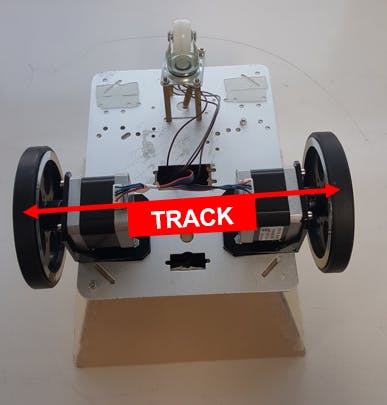
WHEEL_RADIUS 是車輪的半徑。
- Arduino 將距離轉換為電機必須移動的步數,并向步進電機控制器發送命令以移動電機。代碼:
stepMove = dist / WHEEL_PERIMETER * (FULL_STEP_NUM * stepMode);targetStepRight += stepMove;targetStepLeft -= stepMove;
WHEEL_PERIMETER 是車輪的周長
限位開關
車頭設有限位開關,使電機在遇到障礙物時自動停止。
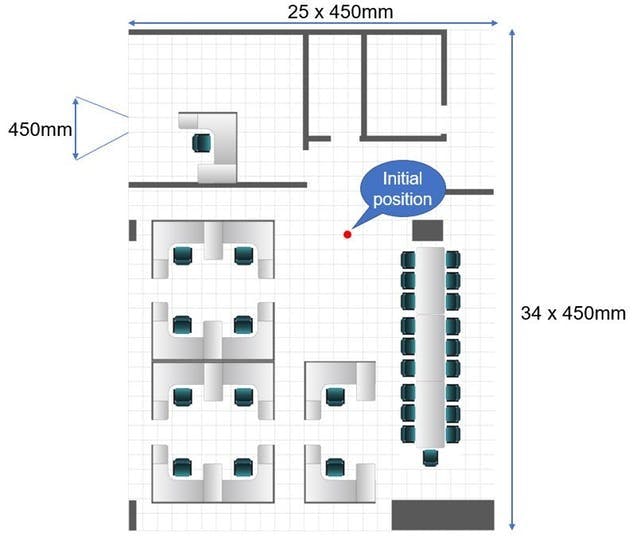
汽車初始位置
初始位置是 Arduino 啟動或重置時汽車的位置。它必須相同:真實位置(您放置汽車的位置)、Arduino 代碼中的位置設置和 Web 用戶界面代碼
在我的設置中,我將汽車設置在位置(第 16 塊磚,第 22 塊磚)(見下圖)
在 Arduino 代碼中(第 54、55 行)
//初始位置preX = 16 * BRICK_REAL_WIDTH;preY = 22 * BRICK_REAL_HEIGHT;
在Web User Interface (line 47. 48)//初始位置//初始位置touchImageX = 16 * IMAGE_WIDTH / 25.0;touchImageY = 22 * IMAGE_HEIGHT / 34.0;
源代碼
Arduino代碼
這是arduino代碼,它在無限循環中運行
網絡用戶界面 - remote_car.php
remote_car.php 是一個包含 Web 用戶界面的文件。它需要存儲在 PHPoC [WiFi] Shield 上。為了將文件上傳到 PHPoC [WiFi] Shield,請執行以下步驟:
- 復制以下代碼并將其保存到 remote_car.php 文件中。
- 安裝PHPoC 調試器
- 根據此說明,通過 micro-USB 電纜將 PHPoC Debugger 連接到 PHPoC [WiFi] Shield。請注意,Arduino 必須通電。
- 根據此說明將 remote_car.php 文件上傳到 PHPoC [WiFi] Shield
- 將 map.png 上傳到 PHPoC [WiFi] Shield
如何
- 為PHPoC shield或PHPoC WiFi shield配置網絡信息
- 安裝PHPoC 庫
- 安裝PHPoC 擴展庫
- 編譯并上傳代碼到 Arduino
- 上傳網頁用戶界面到 PHPoC [WiFi] shield
- 打開 Serial Monitor 并復制 PHPoC Shield 的 IP 地址
- 通過 Web 瀏覽器訪問 Web 用戶界面:http:// ip_address_of_shield /remote_car.php
- 在地圖上按點位置控制汽車
?
- 使用PYNQ和Vitis AI的智能辦公室熱辦公桌
- 自動溫度檢測系統 0次下載
- 自動家庭辦公室
- 多彩世界地圖上的物聯網圣誕老人追蹤器
- 物聯網辦公室清潔跟蹤系統
- 控制家庭或辦公室照明的創新系統開源分享
- 適用于智能辦公室和建筑的終極物聯網傳感器盒
- 辦公室數字化的實現 0次下載
- 線性技術公司收到美國檢察官辦公室的傳票,要求提供有關公司股票期權做法的文件
- MES到底是什么ERP和MES到底有什么區別 19次下載
- 無人駕駛汽車與高清地圖的來臨 5次下載
- 網絡數據入侵中的路線圖譜繪制方法研究 0次下載
- freescale汽車產品路線圖
- 辦公室綜合布線系統解決方案
- 門禁系統在辦公大樓的應用及案例分析
- 基于Python的地圖繪制教程 1277次閱讀
- 分享一個觸摸激活辦公室呼叫鈴電路 867次閱讀
- 基于555的開門報警器電路 1997次閱讀
- 路徑規劃算法之柵格地圖繪制 1847次閱讀
- 如何制作一個數據統計物理可視化儀表盤 4793次閱讀
- 驅動LED照明的最新好方法分享 1997次閱讀
- 交流直接驅動(DACD)有什么優勢 6034次閱讀
- PCB設計中模擬電路和數字電路布線時的異同 934次閱讀
- 怎樣在印刷板圖上繪制原理圖? 4921次閱讀
- 高精地圖在無人駕駛領域的作用,高精地圖與普通導航地圖的區別 2.2w次閱讀
- USB實現隔離的四種方法分析 6w次閱讀
- 基于有源RFID的文件管理方案SmartFile簡介 1295次閱讀
- WIFI無線網絡技術及安全性研究 9681次閱讀
- 電路板測試基礎:您真的了解設備供電的質量嗎? 2680次閱讀
- Wi-Fi 技術簡介,IEEE802.11b技術簡介 928次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1蘇泊爾電磁爐線路的電路原理圖資料合集
- 2.02 MB | 286次下載 | 5 積分
- 2長虹液晶電視R-HS310B-5HF01的電源板電路原理圖
- 0.46 MB | 87次下載 | 5 積分
- 3AO4803A雙P通道增強型場效應晶體管的數據手冊
- 0.11 MB | 28次下載 | 2 積分
- 4長虹液晶彩電LS29機芯的技術資料說明
- 3.42 MB | 16次下載 | 2 積分
- 5TP4055 500mA線性鋰離子電池充電器中文手冊
- 0.75 MB | 9次下載 | 免費
- 6TP4054 400mA線性鋰離子電池充電器中文手冊
- 0.70 MB | 2次下載 | 免費
- 7TP4057X 500mA線性鋰離子電池充電器中文手冊
- 0.74 MB | 2次下載 | 免費
- 8AI智能眼鏡產業鏈分析
- 4.43 MB | 2次下載 | 免費
本月
- 1蘇泊爾電磁爐線路的電路原理圖資料合集
- 2.02 MB | 286次下載 | 5 積分
- 2人形機器人電機驅動和傳感報告
- 4.27 MB | 169次下載 | 免費
- 3長虹液晶電視R-HS310B-5HF01的電源板電路原理圖
- 0.46 MB | 87次下載 | 5 積分
- 4U盤一鍵制作
- 23.84 MB | 41次下載 | 免費
- 5AO4803A雙P通道增強型場效應晶體管的數據手冊
- 0.11 MB | 28次下載 | 2 積分
- 6Altium Designer元件庫
- 17.11 MB | 23次下載 | 免費
- 7長虹液晶彩電LS29機芯的技術資料說明
- 3.42 MB | 16次下載 | 2 積分
- 8TP4055 500mA線性鋰離子電池充電器中文手冊
- 0.75 MB | 9次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935127次下載 | 10 積分
- 2開源硬件-PMP21529.1-4 開關降壓/升壓雙向直流/直流轉換器 PCB layout 設計
- 1.48MB | 420064次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233089次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費下載
- 340992 | 191382次下載 | 10 積分
- 5十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183342次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81586次下載 | 10 積分
- 7Keil工具MDK-Arm免費下載
- 0.02 MB | 73814次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65988次下載 | 10 積分





 工商網監
工商網監
評論