 電子發(fā)燒友App
電子發(fā)燒友App











 創(chuàng)作
創(chuàng)作 發(fā)文章
發(fā)文章 發(fā)帖
發(fā)帖  提問
提問  發(fā)資料
發(fā)資料 發(fā)視頻
發(fā)視頻資料介紹
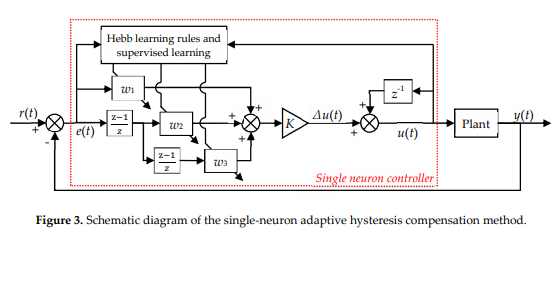
提出了一種基于單神經(jīng)元自適應(yīng)控制的壓電陶瓷驅(qū)動器遲滯補償方法。對于給定的期望軌跡,利用Hebb學習規(guī)則,根據(jù)實際軌跡和期望軌跡之間的誤差動態(tài)調(diào)整PEA的控制輸入。具有自學習和自適應(yīng)能力的單神經(jīng)元是一個非線性處理單元,非常適合于時變系統(tǒng)。基于單神經(jīng)元控制,PEA的遲滯補償可以看作是傳遞生物神經(jīng)元信息的過程。通過實際軌跡與期望軌跡之間的誤差信息,采用神經(jīng)元學習的權(quán)值調(diào)整方法對控制輸入進行調(diào)整。此外,本文還將Hebb學習規(guī)則和監(jiān)督學習相結(jié)合作為教師信號,能夠快速響應(yīng)控制信號。單神經(jīng)元控制器的權(quán)值可以在線不斷調(diào)整,以提高系統(tǒng)的控制性能。實驗結(jié)果表明,所提出的單神經(jīng)元自適應(yīng)遲滯補償方法能夠很好地跟蹤連續(xù)和不連續(xù)的軌跡。單神經(jīng)元自適應(yīng)控制器具有較好的自適應(yīng)和自學習性能,克服了PEA滯后的速率依賴性。
壓電作動器(PEAs)作為一種亞納米分辨率的驅(qū)動器件,在需要納米級精確運動的各種應(yīng)用中得到了廣泛的應(yīng)用[1–4],但PEA固有的遲滯非線性大大降低了其定位精度,影響了其在精密定位中的適用性和性能操作任務(wù)。PEA遲滯最顯著的特征是速率依賴性和不對稱性[5-7],即遲滯環(huán)隨著輸入速率(或頻率)的增加而變厚,且遲滯環(huán)的中心不對稱。這些特性增加了系統(tǒng)的復雜性,給遲滯建模和補償帶來很大困難。為了解決上述問題,人們提出了許多控制方法來表征和補償PEA的遲滯特性。物理模型可以從物理測量方法中導出,如磁化、應(yīng)力應(yīng)變和能量原理[8,9],但是數(shù)學表示往往很復雜,很難得到逆磁滯模型。同時,還提出了一種基于現(xiàn)象的模型,如Preisach模型〔10〕、Prandtl-Ishlinskii(PI)模型〔11,12〕、Maxwell模型〔13〕,由于經(jīng)典PI模型的反演在理論上是可行的,因此在許多研究中被廣泛應(yīng)用于描述磁滯特性豌豆。在得到逆模型后,可以將其作為一個前饋滯環(huán)補償器。這種建模和反演方法被廣泛采用,許多自適應(yīng)方法都可以集成〔14–17〕,為了避免反演計算,還提出了直接反演方法(DIM),直接從參數(shù)辨識中的測量值中識別出逆遲滯模型〔18–20〕
對于基于模型的遲滯補償,控制器的性能在很大程度上取決于遲滯模型的建模精度。然而,PEA的遲滯特性受許多因素的影響,例如外部負載和控制輸入的頻率。這使得PEA遲滯的建模和補償非常敏感。因此,通常很難獲得高精度的遲滯模型。因此,為了獲得更高的魯棒性和適應(yīng)性,人們提出了許多智能控制算法。例如,為了提高系統(tǒng)對噪聲和干擾的控制精度和魯棒性,提出了一種滑模控制方法〔14,21〕,并提出了一種具有前饋滯環(huán)補償和比例積分微分(PID)反饋的線性化控制方法〔22〕,此外,還提出了迭代學習控制方法在智能控制領(lǐng)域,神經(jīng)網(wǎng)絡(luò)是一種功能強大的系統(tǒng)辨識工具。它具有很強的自學習能力和對非線性系統(tǒng)的映射能力,在復雜系統(tǒng)的控制中得到了廣泛的應(yīng)用[24,25]基于動態(tài)線性化多層前向神經(jīng)網(wǎng)絡(luò)模型,提出了無逆預測控制器〔27〕,并提出了小腦模型關(guān)節(jié)控制器神經(jīng)網(wǎng)絡(luò)PID控制器〔4〕,采用徑向基函數(shù)(RBF)網(wǎng)絡(luò)對PEA的滯后進行建模和補償〔28〕。然而,S型作用函數(shù)的使用增加了快速、高頻和快速響應(yīng)系統(tǒng)(如PEA)的計算難度。在基于神經(jīng)網(wǎng)絡(luò)的控制器中,單神經(jīng)元自適應(yīng)系統(tǒng)保留了神經(jīng)網(wǎng)絡(luò)的優(yōu)點,能夠滿足快速過程實時控制的要求[29,30],因此,本文提出了一種單神經(jīng)元自適應(yīng)遲滯補償方法。該控制器模仿自適應(yīng)單神經(jīng)元系統(tǒng)學習,采用Hebb學習規(guī)則和有監(jiān)督學習對控制器進行調(diào)整。該控制器能對時變信號做出快速響應(yīng),適用于速率相關(guān)的滯環(huán)補償。通過定位和軌跡跟蹤實驗,研究了該方法的性能。為了比較,還研究了PID控制的性能。對于定位控制,該方法可以在8ms內(nèi)收斂,穩(wěn)態(tài)跟蹤誤差可以降低到系統(tǒng)的噪聲水平。對于軌跡跟蹤,使用頻率高達50赫茲的正弦和三角形軌跡。實驗結(jié)果表明,該方法對PEA遲滯的速率依賴性具有很好的魯棒性和適應(yīng)性,能夠很好地補償遲滯。本文主要內(nèi)容如下:第二節(jié)介紹了PEA的固有磁滯特性。第三節(jié)介紹了單神經(jīng)元自適應(yīng)控制器的設(shè)計與分析。為了研究該方法的有效性,第4節(jié)提供了實驗驗證和性能分析。第五節(jié)對本文進行了總結(jié)。
- 壓電陶瓷驅(qū)動器單神經(jīng)元自適應(yīng)磁滯補償實驗 0次下載
- 帶延遲調(diào)整的脈沖神經(jīng)元學習算法 12次下載
- 神經(jīng)元的電路模型 14次下載
- 基于非聯(lián)合型學習機制的學習神經(jīng)元模型 0次下載
- 基于單神經(jīng)元自適應(yīng)PSD的汽包液位控制_常杰鋒 0次下載
- 基于WLAN與單神經(jīng)元自適應(yīng)PID的空調(diào)系統(tǒng)設(shè)計 23次下載
- 單神經(jīng)元PID控制的吊車防擺定位系統(tǒng) 27次下載
- 神經(jīng)PID控制基礎(chǔ)
- 自適應(yīng)線性神經(jīng)元方法同軸相對論返波管高頻特性的數(shù)值分析
- 單神經(jīng)元自適應(yīng)PID控制在電動油門控制中的應(yīng)用
- 單神經(jīng)元自適應(yīng)PID控制器設(shè)計方法研究
- 單神經(jīng)元PID雙直線電機同步控制
- 自適應(yīng)模糊神經(jīng)網(wǎng)絡(luò)研究
- 電站鍋爐汽包水位系統(tǒng)的單神經(jīng)元自適應(yīng)PID控制
- 基于單神經(jīng)元的張力控制系統(tǒng)的設(shè)計與仿真
- 人工神經(jīng)元模型中常見的轉(zhuǎn)移函數(shù)有哪些 1209次閱讀
- 神經(jīng)元與神經(jīng)網(wǎng)絡(luò)的區(qū)別與聯(lián)系 1066次閱讀
- 一種具有高度柔性與可塑性的超香腸覆蓋式神經(jīng)元模型 476次閱讀
- 基于單個自適應(yīng)神經(jīng)元的非模型直接控制方法在汽車懸架系統(tǒng)中的應(yīng)用 2018次閱讀
- 基于神經(jīng)網(wǎng)絡(luò)模型參考自適應(yīng)實現(xiàn)混合動力汽車電子差速控制系統(tǒng)的設(shè)計 3738次閱讀
- 流行的Java神經(jīng)網(wǎng)絡(luò)庫,以及實現(xiàn)神經(jīng)網(wǎng)絡(luò)的方法 3817次閱讀
- 深度學習或者人工神經(jīng)網(wǎng)絡(luò)模擬了生物神經(jīng)元? 5853次閱讀
- LSTM隱層神經(jīng)元結(jié)構(gòu)分析,及應(yīng)用的程序詳細概述 9378次閱讀
- 神經(jīng)元和函數(shù)算法之間的關(guān)系(干貨) 1.1w次閱讀
- 一種單神經(jīng)元模糊PID控制方法 8360次閱讀
- 自適應(yīng)控制的優(yōu)缺點_自適應(yīng)控制存在的問題及發(fā)展 5w次閱讀
- 通過刪除神經(jīng)元來理解深度學習 3612次閱讀
- 什么是神經(jīng)網(wǎng)絡(luò)?學習人工智能必會的八大神經(jīng)網(wǎng)絡(luò)盤點 2.5w次閱讀
- 基于FPGA的神經(jīng)網(wǎng)絡(luò)算法的設(shè)計 5650次閱讀
- 神經(jīng)網(wǎng)絡(luò)學習之M-P模型 6485次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1貼片三極管上的印字與真實名稱的對照表詳細說明
- 0.50 MB | 76次下載 | 1 積分
- 2Altium Designer AD 25 軟件安裝包下載
- 0.00 MB | 3次下載 | 免費
- 3Altium Designer 23 軟件下載
- 0.00 MB | 2次下載 | 免費
- 4Altium Designer 22.11.1軟件安裝包下載
- 0.00 MB | 1次下載 | 免費
- 5PADS Professional vx 2.11 安裝包
- 0.00 MB | 1次下載 | 5 積分
- 6高頻率變壓器的設(shè)計
- 0.03 MB | 1次下載 | 1 積分
- 7ANT8817 1%3.5W/3.7V,同步自適應(yīng)升壓,超長續(xù)航,H類防破音單聲道音頻功放中文手冊
- 1.11 MB | 1次下載 | 免費
- 8NS6326 4-30V輸入5V/3A輸出同步降壓穩(wěn)壓器中文手冊
- 1.22 MB | 次下載 | 免費
本月
- 1蘇泊爾電磁爐線路的電路原理圖資料合集
- 2.02 MB | 286次下載 | 5 積分
- 2長虹液晶電視R-HS310B-5HF01的電源板電路原理圖
- 0.46 MB | 87次下載 | 5 積分
- 3貼片三極管上的印字與真實名稱的對照表詳細說明
- 0.50 MB | 76次下載 | 1 積分
- 4U盤一鍵制作
- 23.84 MB | 41次下載 | 免費
- 5AI智能眼鏡產(chǎn)業(yè)鏈分析
- 4.43 MB | 39次下載 | 免費
- 6AO4803A雙P通道增強型場效應(yīng)晶體管的數(shù)據(jù)手冊
- 0.11 MB | 28次下載 | 2 積分
- 7長虹液晶彩電LS29機芯的技術(shù)資料說明
- 3.42 MB | 16次下載 | 2 積分
- 8TP4055 500mA線性鋰離子電池充電器中文手冊
- 0.75 MB | 9次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935127次下載 | 10 積分
- 2開源硬件-PMP21529.1-4 開關(guān)降壓/升壓雙向直流/直流轉(zhuǎn)換器 PCB layout 設(shè)計
- 1.48MB | 420064次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233089次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費下載
- 340992 | 191387次下載 | 10 積分
- 5十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183342次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81586次下載 | 10 積分
- 7Keil工具MDK-Arm免費下載
- 0.02 MB | 73815次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65988次下載 | 10 積分





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論