 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
簡易旋轉倒立擺及控制裝置是復雜的高階閉環控制系統,控制復雜度較高。系統以飛思卡爾MK10DN512ZVLL10單片機為核心,以Mini1024j編碼器為角度傳感器,配合直流電機組成旋轉倒立擺系統,經過充分的系統建模,并考慮單片機運算速度,最終確定采用改進的“模糊PID”控制算法,通過軟件控制,可以滿足基本部分要求和發揮部分要求。
系統的突出特點在于充分的力學理論分析,通過力學建模和控制系統仿真,獲得了大量的定性分析結果,為系統的建立提供了很好的理論依據。
系統方案論證與選擇
倒立擺系統是一個復雜的快速、非線性、多變量、強耦合、自然不穩定的系統。對于該控制系統而言,合適的控制算法、精確的反饋信號、適合的電機驅動等都對系統的穩定性、控制精度及抗干擾性起重要作用。針對上述問題,分別設計多種不同的解決方案,并進行選擇論證。
(1)控制算法選擇
方案一:采用傳統PID控制算法。
傳統PID控制算法是運用反饋求和后的誤差信號的比例(0階位置項)、積分(誤差累積項)、微分(1階速度項)進行系統校正的一種控制算法。可用于被控對象的結構和參數不能完全掌握,或得不到的精確數學模型的情況,控制器的結構和參數必須依靠經驗和反復調試來確定。
方案二:采用模糊PID控制算法
模糊PID控制算法根據PID控制器的三個參數與偏差e和偏差的變化ec之間的模糊關系,在運行時不斷檢測e及ec,通過事先確定的關系,利用模糊推理的方法,在線修改PID控制器的三個參數,讓PID參數可自整定。將模糊控制算法與傳統PID控制算法巧妙結合,不但具有PID控制算法精度高等優點,又兼有模糊控制靈活、適應性強的優點。
綜合考慮選擇方案二的模糊PID控制算法。
(2)電動機選型
方案一:選擇步進電動機
步進電動機是將電脈沖激勵信號轉換成相應的角位移或線位移的離散值控制電動機,這種電動機每當輸入一個電脈沖就動一步。雖然控制時序和驅動電路相對復雜,但步進距離很小,保持力矩大,制動能力強。但步進電機速度只在一定范圍可調,并且一般步進電機在不旋轉時仍有若干相通電,功耗太大。
方案二:選擇直流電動機
直流電動機控制簡單,利用雙極性PWM即可實現調速和正、反轉,功率調節范圍廣、適應性好。直流電機的起動、制動轉矩大,易于快速起動、停車,易于控制,且直流電機的調速性能好,調速范圍廣,易于平滑調節。
綜上考慮選擇方案二的直流電動機。
(3)傳感器的選擇
方案一:使用角位移傳感器
角位移傳感器是一個高精度的電位器,它輸出為模擬量。但是在使用角位移傳感器時,為得到其與豎直方向(即重力方向)的夾角,要使用重擺,且在角度變化小時,由于傳感器自身扭矩,將不會發生角位移,從而得不到采樣數據。
方案二:使用主軸編碼器
主軸編碼器采用與主軸同步的光電脈沖發生器,通過中間軸上的齒輪1:1地同步傳動。一般是發光二極管發出紅外光束,通過動、靜兩片光柵后,到達光電二極管,接收到脈沖信號,變換成數字量輸出。按編碼方式不同,分為增量式編碼器和絕對編碼器。前者輸出脈沖,后者輸出8421碼。絕對值編碼器減輕了電子接收設備的計算任務,從而省去了復雜的和昂貴的輸入裝置,而且,當機器合上電源或電源故障后再接通電源,不需要回到位置參考點,就可利用當前的位置值,得到了廣泛的應用。
綜上考慮選擇方案二的絕對值式主軸編碼器。
2. 系統結構
基于題目要求及以上分析,本系統以飛思卡爾MK10DN512ZVLL10單片機作為核心處理芯片,包括擺桿狀態檢測、電機驅動、液晶顯示等模塊。系統框圖如圖1所示。
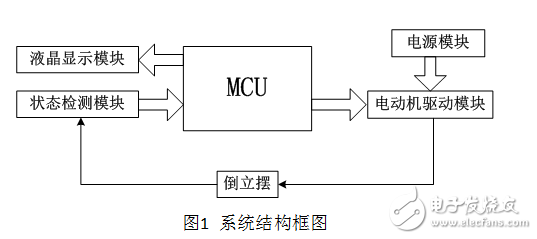
系統各部分功能如下。
中央處理模塊:該模塊采用飛思卡爾MK10DN512ZVLL10單片機作為主控制器,完成系統的控制功能。
擺桿檢測模塊:該模塊由主軸編碼器構成,用于檢測擺桿的角位移及角速度,并將信息反饋給MCU。
電機驅動模塊:該模塊由步進電動機實現,用于驅動旋轉臂做往復運動。
液晶顯示模塊:該模塊由1.8寸SPI TFT全彩屏構成,用于實時動態顯示擺桿角度,以及擺桿保持平衡狀態后維持的時間。
- 模糊控制器控制一級倒立擺 25次下載
- 倒立擺控制系統的原理及其應用介紹 59次下載
- 基于STM32和增量PID的旋轉倒立擺的設計 19次下載
- 一級倒立擺的PID控制設計 64次下載
- 簡易環形倒立擺控制系統的設計實現 20次下載
- 旋轉倒立擺源程序 38次下載
- 簡易旋轉倒立擺及控制裝置(C 題) 41次下載
- 簡易旋轉倒立擺及控制裝置(C題)_2011電賽論文模板 13次下載
- 簡易旋轉倒立擺及控制裝置 (原理圖+源代碼,最終版) 0次下載
- 智能控制在倒立擺控制系統中的應用 56次下載
- 環形單級倒立擺起擺控制研究 67次下載
- 倒立擺和自動控制技術 57次下載
- 環形倒立擺 136次下載
- 倒立擺的模糊控制研究
- 倒立擺系統的T-S模糊控制研究
- 綜合質量控制體系:確保旋轉花鍵整體性能的保障 291次閱讀
- 如何制作簡易降壓控制器 2519次閱讀
- 采用極點配置法實現倒立擺系統的設計 7321次閱讀
- 采用16位結構的微控制器實現二級倒立擺系統的設計 1678次閱讀
- 基于SOPC的彩色旋轉LED屏控制設計 1475次閱讀
- 旋轉編碼器測量_旋轉編碼器安裝方式 3987次閱讀
- STC90C51單片機在倒立擺控制系統中的應用 4110次閱讀
- 淺談旋轉編碼器的功能與作用 7056次閱讀
- 淺析旋轉編碼器的分類與用途 3595次閱讀
- 簡易平衡機器人制作圖解 6936次閱讀
- 簡易太陽能擺制作教程 5724次閱讀
- 倒立擺是什么_倒立擺有什么用 5.7w次閱讀
- 風力擺是什么_風力擺的機械結構 1.9w次閱讀
- 旋轉編碼器的作用及應用 6552次閱讀
- 洗衣服用簡易定時控制器 1632次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1TC358743XBG評估板參考手冊
- 1.36 MB | 330次下載 | 免費
- 2開關電源基礎知識
- 5.73 MB | 6次下載 | 免費
- 3100W短波放大電路圖
- 0.05 MB | 4次下載 | 3 積分
- 4嵌入式linux-聊天程序設計
- 0.60 MB | 3次下載 | 免費
- 5基于FPGA的光纖通信系統的設計與實現
- 0.61 MB | 2次下載 | 免費
- 651單片機窗簾控制器仿真程序
- 1.93 MB | 2次下載 | 免費
- 751單片機大棚環境控制器仿真程序
- 1.10 MB | 2次下載 | 免費
- 8基于51單片機的RGB調色燈程序仿真
- 0.86 MB | 2次下載 | 免費
本月
- 1OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 2555集成電路應用800例(新編版)
- 0.00 MB | 33564次下載 | 免費
- 3接口電路圖大全
- 未知 | 30323次下載 | 免費
- 4開關電源設計實例指南
- 未知 | 21549次下載 | 免費
- 5電氣工程師手冊免費下載(新編第二版pdf電子書)
- 0.00 MB | 15349次下載 | 免費
- 6數字電路基礎pdf(下載)
- 未知 | 13750次下載 | 免費
- 7電子制作實例集錦 下載
- 未知 | 8113次下載 | 免費
- 8《LED驅動電路設計》 溫德爾著
- 0.00 MB | 6653次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935054次下載 | 免費
- 2protel99se軟件下載(可英文版轉中文版)
- 78.1 MB | 537796次下載 | 免費
- 3MATLAB 7.1 下載 (含軟件介紹)
- 未知 | 420026次下載 | 免費
- 4OrCAD10.5下載OrCAD10.5中文版軟件
- 0.00 MB | 234315次下載 | 免費
- 5Altium DXP2002下載入口
- 未知 | 233046次下載 | 免費
- 6電路仿真軟件multisim 10.0免費下載
- 340992 | 191185次下載 | 免費
- 7十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183279次下載 | 免費
- 8proe5.0野火版下載(中文版免費下載)
- 未知 | 138040次下載 | 免費





 工商網監
工商網監
評論