 電子發燒友App
電子發燒友App











 創作
創作 發文章
發文章 發帖
發帖  提問
提問  發資料
發資料 發視頻
發視頻資料介紹
圖1 無人駕駛系統架構圖
算法子系統從傳感器原始數據中提取有意義的信息以了解周遭環境情況,并根據環境變化做出決策。Client子系統融合多種算法以滿足實時性與可靠性的要求。舉例來說,傳感器以60HZ的速度產生原始數據,Client子系統需要保證最長的流水線處理周期也能在16ms內完成。云平臺為無人車提供離線計算以及存儲功能。通過云平臺,我們能夠測試新的算法、更新高精度地圖并訓練更加有效的識別、追蹤、決策模型。
無人駕駛算法
算法系統由幾部分組成:第一,傳感并從傳感器原始數據中提取有意義信息;第二,感知,以定位無人車所在位置以及感知現在所處的環境;第三,決策,以可靠安全抵達目的地。
傳感
通常來說,一輛無人駕駛汽車裝備有許多不同類型的主傳感器。每一種類型的傳感器都各有優劣,因此,來自不同傳感器的傳感數據應該有效地進行融合。現在無人駕駛中普遍使用的傳感器包括以下幾種。
GPS/IMU:通過高達200Hz頻率的全球定位和慣性更新數據以幫助無人車完成自我定位。GPS是一個相對準確的定位用傳感器,但是它的更新頻率過低,僅僅有10HZ,不足以提供足夠實時的位置更新。IMU的準確度隨著時間降低,在長時間內并不能保證位置更新的準確性,但是,它有著GPS所欠缺的實時性,IMU的更新頻率可以達到200HZ或者更高。通過整合GPS與IMU,我們可以為車輛定位提供既準確又足夠實時的位置更新。
LiDAR:激光雷達可被用來繪制地圖、定位以及避障。雷達的準確率非常高,因此在無人車設計中雷達通常被作為主傳感器使用。激光雷達是以激光為光源,通過探測激光與被探測無相互作用的光波信號來完成遙感測量。激光雷達可以用來產生高精度地圖,并針對高精地圖完成移動車輛的定位;以及滿足避障的要求。以Velodyne 64-束激光雷達為例,它可完成10HZ旋轉并每秒可達到130萬次讀數。
攝像頭:被廣泛使用在物體識別以及物體追蹤等場景中,像是車道線檢測、交通燈偵測、人行道檢測中都以攝像頭為主要解決方案。為了加強安全性,現有的無人車實現通常在車身周圍使用至少八個攝像頭,分別從前、后、左、右四個維度完成物體發現、識別、追蹤等任務。這些攝像頭通常以60HZ的頻率工作,當多個攝像頭同時工作時,將產生高達1.8GB每秒的巨數據。
雷達和聲吶:雷達通過把電磁波能量射向空間某一方向,處在此方向上的物體反射碰到的電磁波;雷達再接收此反射波,提取有關該物體的某些信息(目標物體至雷達的距離,距離變化率或徑向速度、方位、高度等)。雷達和聲吶系統是避障的最后一道保障。雷達和聲吶產生的數據用來表示在車的前進方向上最近障礙物的距離。一旦系統檢測到前方不遠有障礙物出現,則有極大的相撞危險,無人車會啟動緊急剎車以完成避障。因此,雷達和聲吶系統產生的數據不需要過多的處理,通常可直接被控制處理器采用,并不需要主計算流水線的介入,因為可實現轉向,剎車、或預張緊安全帶等緊急功能。
感知
在獲得傳感信息之后,數據將被推送至感知子系統以充分了解無人車所處的周遭環境。在這里感知子系統主要做的是三件事:定位、物體識別以及物體追蹤。
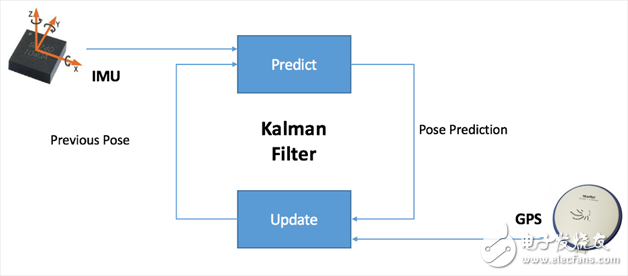
圖2 基于GPS/IMU的定位
定位
GPS以較低的更新頻率提供相對準確的位置信息;IMU則以較高的更新頻率提供準確性偏低的位置信息。我們可使用卡爾曼濾波來整合兩類數據各自的優勢,合并提供準確且實時的位置信息更新。如圖2所示,IMU每5ms更新一次,但是期間誤差不斷累積精度不斷降低。所幸的是,每100ms可以得到一次GPS數據更新,以幫助我們校正IMU積累的誤差。因此,我們最終可以獲得實時并準確的位置信息。然而,我們不能僅僅依靠這樣的數據組合以完成定位工作。原因有三:其一,這樣的定位精度僅在一米之內;其二,GPS信號有著天然的多路徑問題將引入噪聲干擾;其三,GPS必須在非封閉的環境下工作,因此在諸如隧道等場景中GPS都不適用。
- 用于自動駕駛,無人駕駛領域的IMU六軸陀螺儀傳感器:M-G370
- 32.768K晶振X1A000141000300適用于無人駕駛汽車電子設備
- 無人駕駛汽車的路徑規劃與跟隨控制算法案例 3次下載
- 無人駕駛車輛開源分享
- 技術前沿:今日的創新如何改變無人駕駛的未來
- 基于矢量傳感器的無人駕駛汽車信號遠程監測系統 19次下載
- 無人駕駛汽車模型預測控制相關源代碼 29次下載
- 了解無人駕駛汽車原理
- 無人駕駛汽車的未來仿真如何
- 無人駕駛汽車的來源及其四個階段技術特征的詳解 18次下載
- 無人駕駛之光學雷達技術探究 3次下載
- 介紹ADAS與無人駕駛的關系 10次下載
- 無人駕駛核心公司競爭力排行 3次下載
- 無人駕駛要收集多少數據才夠? 17次下載
- 無人駕駛技術及產業鏈精華集錦 46次下載
- 無人駕駛汽車的發展前景詳細說明 1.4w次閱讀
- 無人駕駛汽車有什么優點和缺點 9.2w次閱讀
- 無人駕駛汽車的工作原理和特點詳細說明 2.5w次閱讀
- 無人駕駛汽車的發展前景分析 1.4w次閱讀
- 無人駕駛系統的軟件架構是怎樣的 6091次閱讀
- 在無人駕駛車里玩游戲:VR+無人駕駛是怎么樣的體驗 1w次閱讀
- 無人駕駛技術主要有幾種技術組成 4.5w次閱讀
- 詳細無人駕駛汽車的關鍵技術——LiDAR 1.7w次閱讀
- 無人駕駛汽車技術_無人駕駛汽車關鍵技術_無人駕駛汽車技術原理 2.9w次閱讀
- 無人駕駛技術原理_無人駕駛技術的應用_無人駕駛技術的現狀及發展(前景) 4.6w次閱讀
- 無人駕駛技術哪家厲害_美國無人駕駛技術領先中國多少? 1.3w次閱讀
- 奔馳無人駕駛解決方案及奔馳f015無人駕駛方案 1.3w次閱讀
- 無人駕駛汽車技術實現 1.1w次閱讀
- 無人駕駛關鍵技術分析 2.2w次閱讀
- 無人駕駛如何前行? 784次閱讀

 上傳資料賺積分
上傳資料賺積分下載排行
本周
- 1蘇泊爾電磁爐線路的電路原理圖資料合集
- 2.02 MB | 286次下載 | 5 積分
- 2長虹液晶電視R-HS310B-5HF01的電源板電路原理圖
- 0.46 MB | 87次下載 | 5 積分
- 3AO4803A雙P通道增強型場效應晶體管的數據手冊
- 0.11 MB | 28次下載 | 2 積分
- 4長虹液晶彩電LS29機芯的技術資料說明
- 3.42 MB | 16次下載 | 2 積分
- 5TP4055 500mA線性鋰離子電池充電器中文手冊
- 0.75 MB | 9次下載 | 免費
- 6TP4054 400mA線性鋰離子電池充電器中文手冊
- 0.70 MB | 2次下載 | 免費
- 7TP4057X 500mA線性鋰離子電池充電器中文手冊
- 0.74 MB | 2次下載 | 免費
- 8AI智能眼鏡產業鏈分析
- 4.43 MB | 2次下載 | 免費
本月
- 1蘇泊爾電磁爐線路的電路原理圖資料合集
- 2.02 MB | 286次下載 | 5 積分
- 2人形機器人電機驅動和傳感報告
- 4.27 MB | 169次下載 | 免費
- 3長虹液晶電視R-HS310B-5HF01的電源板電路原理圖
- 0.46 MB | 87次下載 | 5 積分
- 4U盤一鍵制作
- 23.84 MB | 41次下載 | 免費
- 5AO4803A雙P通道增強型場效應晶體管的數據手冊
- 0.11 MB | 28次下載 | 2 積分
- 6Altium Designer元件庫
- 17.11 MB | 23次下載 | 免費
- 7長虹液晶彩電LS29機芯的技術資料說明
- 3.42 MB | 16次下載 | 2 積分
- 8TP4055 500mA線性鋰離子電池充電器中文手冊
- 0.75 MB | 9次下載 | 免費
總榜
- 1matlab軟件下載入口
- 未知 | 935127次下載 | 10 積分
- 2開源硬件-PMP21529.1-4 開關降壓/升壓雙向直流/直流轉換器 PCB layout 設計
- 1.48MB | 420064次下載 | 10 積分
- 3Altium DXP2002下載入口
- 未知 | 233089次下載 | 10 積分
- 4電路仿真軟件multisim 10.0免費下載
- 340992 | 191382次下載 | 10 積分
- 5十天學會AVR單片機與C語言視頻教程 下載
- 158M | 183342次下載 | 10 積分
- 6labview8.5下載
- 未知 | 81586次下載 | 10 積分
- 7Keil工具MDK-Arm免費下載
- 0.02 MB | 73814次下載 | 10 積分
- 8LabVIEW 8.6下載
- 未知 | 65988次下載 | 10 積分





 工商網監
工商網監
評論