使用LabVIEW實(shí)現(xiàn)deeplabV3語義分割
2023-03-22 15:06:52 1253
1253 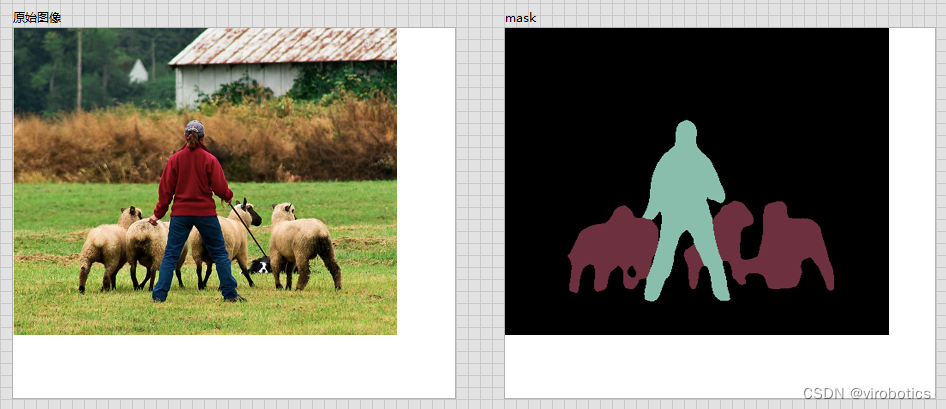
使用LabVIEW實(shí)現(xiàn) DeepLabv3+ 語義分割含源碼
2023-05-26 10:23:01522 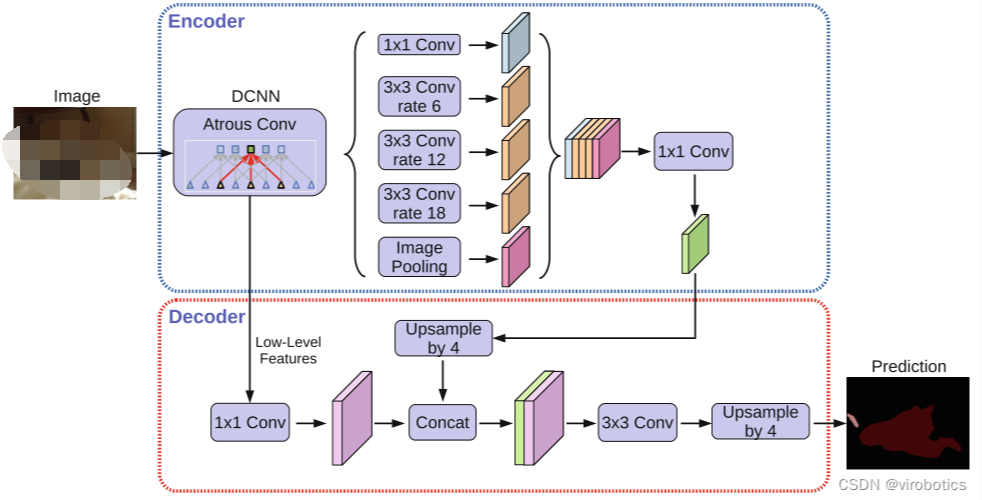
傳感器數(shù)據(jù)融合算法是一種將多個(gè)傳感器收集到的數(shù)據(jù)合并到一個(gè)一致和準(zhǔn)確的表示中的技術(shù)。這種算法的目的是提高數(shù)據(jù)精確性和可靠性,從而增強(qiáng)對(duì)環(huán)境或目標(biāo)的理解和控制。在本文中,我們將詳細(xì)討論傳感器數(shù)據(jù)融合
2023-12-15 10:28:05647 ???? 所謂多傳感器信息融合(Multi-sensor Information Fusion,MSIF),就是利用計(jì)算機(jī)技術(shù)將來自多傳感器或多源的信息和數(shù)據(jù),在一定的準(zhǔn)則下加以自動(dòng)分析和綜合,以
2018-11-07 10:53:06
什么是3D NAND?什么是4D NAND?3D NAND與4D NAND之間的差別在哪兒?
2021-06-18 06:06:00
的“大數(shù)據(jù)”現(xiàn)象。傳感器融合是應(yīng)用到為傳感器輸入帶來更廣闊語境的術(shù)語,如將俯仰和滾轉(zhuǎn)與地理位置、加速度與經(jīng)過時(shí)間、溫度與海拔相結(jié)合。它實(shí)際上是推斷測(cè)量以外其他數(shù)據(jù)的過程,其方式幾乎可以認(rèn)為是智能。增加
2017-03-31 12:32:44
的、不太完美的傳感器融合。但是,最終用戶很容易發(fā)現(xiàn)這些實(shí)現(xiàn)具有相當(dāng)多的缺點(diǎn),并且精度很低。 傳感器融合是一種創(chuàng)新的工程技術(shù),通過整合來自各種系統(tǒng)傳感器的數(shù)據(jù),來保證更加精確、完整和可靠的傳感器信號(hào)或
2018-11-07 10:50:56
本帖最后由 eehome 于 2013-1-5 09:50 編輯
各位前輩,我是新手,現(xiàn)在想制作一個(gè)實(shí)物,將多個(gè)傳感器融合,采集多個(gè)數(shù)據(jù)。但無從下手,希望大家指點(diǎn)指點(diǎn),非常感謝!
2012-04-06 22:54:19
理和電氣性能方面經(jīng)歷了革命性改變,同時(shí)引發(fā)了傳感器集成方面的新思想——范圍從傳感器融合到應(yīng)用在類似霧計(jì)算的架構(gòu)中的基于AI的傳感器處理算法的生成。
2020-05-19 08:12:53
)、麥克風(fēng)和慣性測(cè)量單元(IMU),它們從圖像、聲音、RF和運(yùn)動(dòng)中生成多種類型和比特率的數(shù)據(jù),可用于創(chuàng)建完整的3D情境感知設(shè)備。為了以最高的每瓦性能處理復(fù)雜的多傳感器處理用例,SensPro的全新架構(gòu)
2020-06-04 15:20:55
LITESTAR 4D旨在為照明行業(yè)(制造商,代理商,分銷商,設(shè)計(jì)師,項(xiàng)目經(jīng)理等)提供一套整合的照明系統(tǒng)方案,包括服務(wù)、軟件及硬件,客戶確認(rèn)購買我們的產(chǎn)品后,我們將秉承服務(wù)第一。 主要模塊
2020-03-26 10:53:27
PV = nRT嗎?)很容易要求你的新傳感器融合設(shè)計(jì)包含各種傳感器,這樣你的新算法就能擁有它需要的所有數(shù)據(jù);但在某些時(shí)候,您的MCU需要連接到所有這些傳感器,同時(shí)以您的算法所需的速率提供數(shù)據(jù)。哦,順便
2019-05-23 08:00:00
全球四十萬家機(jī)構(gòu)用戶,是大時(shí)代語義智能分析的一大利器。 NLPIR大數(shù)據(jù)語義智能分析平臺(tái)平臺(tái)針對(duì)互聯(lián)網(wǎng)內(nèi)容處理的需要,融合了自然語言理解、網(wǎng)絡(luò)搜索和文本挖掘的技術(shù),提供了用于技術(shù)二次開發(fā)的基礎(chǔ)工具集
2018-08-27 10:53:23
嘿,我們正在使用NUCLEO-F401RE板,并期待通過Bosch(BMI 160)連接imu傳感器,其中包含陀螺儀+加速度計(jì)。我想知道是否有一個(gè)傳感器融合庫用于ST中的這個(gè)特定傳感器,它可以幫助
2019-04-26 08:13:18
本帖最后由 srxh 于 2015-12-7 23:19 編輯
講多傳感器數(shù)據(jù)融合技術(shù),可參考下,拓展我們的系統(tǒng)構(gòu)架、優(yōu)化系統(tǒng)算法主要內(nèi)容:數(shù)據(jù)融合算法、融合結(jié)構(gòu),貝葉斯推理、Dempster_Shasher算法、人工神經(jīng)網(wǎng)絡(luò)、模糊邏輯和模糊神經(jīng)網(wǎng)絡(luò)。老外的書,比較經(jīng)典!
2015-12-07 22:52:50
,然后與主機(jī)交互,然后向主機(jī)傳遞數(shù)據(jù)。在我的例子中,主機(jī)微控制器是PIC24FJ64 GA202。我已經(jīng)識(shí)別了從ULTCD43 PT到GTX工具(在4D系統(tǒng)車間軟件)和使用我的邏輯分析儀的PIC24F
2019-09-25 14:37:38
覆蓋了圖像的全部、一半和小部分。他們被融合為全局先驗(yàn)信息;在c的最后部分將之前的金字塔特征映射與原始特征映射concate起來;在進(jìn)行卷積,生成d中的最終預(yù)測(cè)圖。總結(jié)基于深度學(xué)習(xí)的圖像語義分割模型大多
2021-12-28 11:03:35
覆蓋了圖像的全部、一半和小部分。他們被融合為全局先驗(yàn)信息;在c的最后部分將之前的金字塔特征映射與原始特征映射concate起來;在進(jìn)行卷積,生成d中的最終預(yù)測(cè)圖。總結(jié)基于深度學(xué)習(xí)的圖像語義分割模型大多
2021-12-28 11:06:01
申請(qǐng)理由:之前有使用過TI的DSP處理器,現(xiàn)在正好有個(gè)項(xiàng)目,準(zhǔn)備采用TI的C6000系列DSP用于傳感器數(shù)據(jù)融合算法的實(shí)現(xiàn)。希望能夠通過申請(qǐng),謝謝。項(xiàng)目描述:由于工業(yè)機(jī)器人的重復(fù)定位精度和絕對(duì)定位
2015-09-10 11:13:49
智能家居模型驗(yàn)證數(shù)據(jù)融合快速開發(fā)過程)1.溫濕度、空氣環(huán)境質(zhì)量的檢測(cè)。2.傳感器單元自組網(wǎng)系統(tǒng)的融合。3.連接上位機(jī),可對(duì)傳感器數(shù)據(jù)進(jìn)行實(shí)時(shí)監(jiān)控。4.爭(zhēng)取實(shí)現(xiàn)攝像頭行為模式識(shí)別。
2017-07-03 18:30:50
`做四軸飛行器有一段時(shí)間了,現(xiàn)在分享一些我對(duì)于卡爾曼濾波算法用于兩個(gè)傳感器融合的一些心得:卡爾曼濾波 實(shí)現(xiàn)性最優(yōu)解的一種求解算法,但是他必須根據(jù)建模的預(yù)測(cè)值和傳感器數(shù)據(jù)采集的測(cè)量值 才能夠進(jìn)行
2015-06-12 15:11:05
service-0.1.0.jar命令運(yùn)行軟件4將開發(fā)板和筆記本電腦設(shè)置在同一網(wǎng)段中5在筆記本中使用postman拉取融合結(jié)果如下:
融合結(jié)果23.09,高精度傳感器測(cè)量值23.25
四、參考文獻(xiàn)[1]敬如雪,高玉琢
2023-12-26 20:59:02
微控制器實(shí)現(xiàn)。一些制造商已經(jīng)開發(fā)了完全集成的傳感器集線器,如 Bosch Sensortec 的 BHA250。這種創(chuàng)新器件集成一個(gè)三軸加速計(jì)和運(yùn)動(dòng)檢測(cè)的軟件算法,可在集成式可編程“融合器內(nèi)核”微控制器上
2018-07-19 10:50:20
,更有信心。”具有超分辨率和4d 定位的先進(jìn)4d 感知軟件Aeva 的專有感知軟件利用原始的4d 傳感器數(shù)據(jù)提供新的實(shí)時(shí)性能,這是傳統(tǒng)的飛行時(shí)間激光雷達(dá)傳感器所無法提供的:超分辨率: 一個(gè)實(shí)時(shí)攝像機(jī)
2022-02-25 11:37:50
發(fā)言人指出實(shí)現(xiàn)準(zhǔn)確的傳感器數(shù)據(jù),需要注意不同階段的設(shè)備設(shè)計(jì):“階段一是傳感器硬件和軟件共同設(shè)計(jì)階段,在該階段我們定義了最優(yōu)初始參數(shù)例如噪聲和補(bǔ)償;第二階段是系統(tǒng)軟件層次上,提供最佳的傳感器數(shù)據(jù)融合庫
2014-04-25 15:07:45
本帖最后由 ⊙菰輈億葉⊙ 于 2014-3-2 22:57 編輯
豐田 4D芯片區(qū)分方法
2014-03-02 22:55:57
ATK-IMU901 角度傳感器
2023-03-28 13:06:19
人工神經(jīng)網(wǎng)絡(luò)在傳感器數(shù)據(jù)融合中的應(yīng)用針對(duì)壓力傳感器對(duì)溫度的交叉靈敏度,采用BP 人工神經(jīng)網(wǎng)絡(luò)法對(duì)其進(jìn)行數(shù)據(jù)融合處理,消除溫度對(duì)壓力傳感器的影響,大大提高了傳感器的穩(wěn)定性及其精度,效果良好。關(guān)鍵詞
2009-08-11 20:23:46
什么是傳感器融合? #motion-sensor #inemo#sensor-fusion#sensor-fusion #inemo以上來自于谷歌翻譯以下為原文 What is sensor
2018-12-10 16:43:27
多傳感器信息融合技術(shù)綜合了概率統(tǒng)計(jì)、信號(hào)處理、人工智能、控制理論等多個(gè)學(xué)科的最新科研成果,為機(jī)器人精確、全面、實(shí)時(shí)地感知各種復(fù)雜的、動(dòng)態(tài)的、不確定的未知環(huán)境提供了一種先進(jìn)的技術(shù)手段。在研究基于多
2020-08-18 07:43:38
)。 預(yù)定義濾波器使得精細(xì)調(diào)整速度更快 既然傳感器融合操作的精細(xì)調(diào)整已發(fā)展并簡(jiǎn)化成了濾波器調(diào)整任務(wù),它就給開發(fā)人員提供了一個(gè)有價(jià)值的機(jī)會(huì)。通過適當(dāng)調(diào)整濾波器,開發(fā)人員或OEM廠商可以讓最終產(chǎn)品以市場(chǎng)差異化
2018-11-08 15:29:31
多傳感器信息融合是指協(xié)調(diào)使用多個(gè)傳感器,把分布在不同位置的多個(gè)傳感器所提供的局部不完整觀測(cè)量及相關(guān)聯(lián)數(shù)據(jù)庫中的相關(guān)信息加以綜合,消除多傳感器信息之間可能存在的冗余和矛盾,并加以互補(bǔ),降低其不確定性
2018-11-12 10:49:55
本文介紹基于Android的多傳感器信息融合技術(shù)在氣溶膠自動(dòng)化檢測(cè)中的應(yīng)用。
2021-05-11 06:22:08
PV = nRT嗎?)很容易要求你的新傳感器融合設(shè)計(jì)包含各種傳感器,這樣你的新算法就能擁有它需要的所有數(shù)據(jù);但在某些時(shí)候,您的MCU需要連接到所有這些傳感器,同時(shí)以您的算法所需的速率提供數(shù)據(jù)。哦,順便
2019-07-12 06:45:44
采用CarlsON 最優(yōu)數(shù)據(jù)融合準(zhǔn)則, 將基于Kalman 濾波的多傳感器狀態(tài)融合估計(jì)方法應(yīng)用到雷達(dá)跟蹤系統(tǒng)。仿真實(shí)驗(yàn)表明,多傳感器Kalman 濾波狀態(tài)融合估計(jì)誤差小于單傳感器Kalman 濾波得出的狀態(tài)估計(jì)誤差,驗(yàn)證了方法對(duì)雷達(dá)跟蹤的有效性。
2020-04-06 07:42:16
本系統(tǒng)所設(shè)計(jì)的機(jī)器人的主要任務(wù)是在未知環(huán)境下依靠多傳感器信息,運(yùn)用D-S數(shù)據(jù)融合算法,提供與環(huán)境有關(guān)的關(guān)于系統(tǒng)狀態(tài)的足夠的與可靠的信息,使機(jī)器人能夠自主規(guī)劃路徑、躲避障礙物,最終向目標(biāo)靠近
2018-11-01 15:08:27
數(shù)據(jù)融合方式消除溫度誤差。構(gòu)建了多傳感器融合模型,選用徑向基函數(shù)(Radial Basis Function,RBF)網(wǎng)絡(luò)對(duì)磁敏傳感器和溫度傳感器的輸出進(jìn)行融合,并通過實(shí)驗(yàn)驗(yàn)證了該方法的有效性。檢測(cè)系統(tǒng)的準(zhǔn)確度和穩(wěn)定性有了明顯的提高。
2020-03-06 08:16:48
多傳感器融合系統(tǒng)具有哪幾個(gè)特點(diǎn)?信息融合系統(tǒng)的體系結(jié)構(gòu)主要有哪幾種?
2021-05-19 06:36:24
多傳感器信息融合問題,我剛剛查了百度,但是說的全是理論。我想問的是:1、多傳感器信息融合使用的處理器是單片機(jī)還是電腦?2、單片機(jī)外接幾個(gè)傳感器然后顯示出來算是多傳感器信息融合技術(shù)么??3、他能帶給我們什么好處?
2020-08-26 08:07:50
多傳感器信息融合技術(shù)
2012-08-15 20:09:31
導(dǎo)讀:所謂多傳感器信息融合(Multi-sensor Information Fusion,MSIF),就是利用計(jì)算機(jī)技術(shù)將來自多傳感器或多源的信息和數(shù)據(jù),在一定的準(zhǔn)則下加以自動(dòng)分析和綜合,以完成
2018-11-07 11:06:00
開發(fā)一個(gè)系統(tǒng)來測(cè)量一個(gè)(模擬)汽車懸架的振動(dòng)響應(yīng),使用計(jì)算機(jī)和定制軟件寫在LabVIEW…你的懸架將由一個(gè)簡(jiǎn)單的懸臂梁模型組成。一個(gè)小磁鐵附在梁的末端。然后,使用霍爾效應(yīng)傳感器來確定懸臂梁的運(yùn)動(dòng)
2020-05-11 11:07:14
為了對(duì)傳感器融合工作進(jìn)行基準(zhǔn)測(cè)試,我想創(chuàng)建一個(gè)代碼應(yīng)用程序來測(cè)試它。作為電話應(yīng)用程序的一部分提供的那個(gè)不能可靠地工作,也想自己編寫代碼。我正在檢查網(wǎng)站上提供的介紹。在提供的“專業(yè)模式”示例中,我
2023-01-12 06:06:56
作者:Joy Yang1.什么是姿態(tài)融合算法簡(jiǎn)單來說,姿態(tài)融合算法就是融合多種運(yùn)動(dòng)傳感器數(shù)據(jù)(一般需要3軸加速度, 3軸陀螺儀或者3軸地磁感應(yīng)傳感器),通過數(shù)字濾波算法容錯(cuò)補(bǔ)償,實(shí)現(xiàn)當(dāng)前姿態(tài)檢測(cè)
2019-07-19 06:47:49
`有了虛擬實(shí)境VR頭戴式顯示器,和4D影院的區(qū)別可能主要就是遇到座椅了。這個(gè)多自由度運(yùn)動(dòng)座椅放在家里不太劃算,但是把家里的一般沙發(fā)直接改造成運(yùn)動(dòng)沙發(fā)感覺好多了。Kickstarter 上正在眾籌
2016-02-24 11:18:24
小編科普:傳感器融合為什么能增強(qiáng)設(shè)備性能
2021-05-13 06:39:09
本文介紹了幾類常用的無線傳感器網(wǎng)絡(luò)數(shù)據(jù)融合算法,并比較了其優(yōu)缺點(diǎn)。
2021-06-03 06:41:59
無線傳感器網(wǎng)絡(luò)(wircless sensor network, wSN)是一種無基礎(chǔ)設(shè)施的無線網(wǎng)絡(luò),最初來源于美國(guó)DARPA的研究項(xiàng)目,它綜合了傳感器技術(shù).嵌入式計(jì)算技術(shù)、分布式信息處理技術(shù)
2023-09-21 08:18:40
由于無線傳感器網(wǎng)絡(luò)中節(jié)點(diǎn)的能量十分有限,因此在設(shè)計(jì)各種網(wǎng)絡(luò)協(xié)議時(shí)必須考慮節(jié)能。采用網(wǎng)內(nèi)數(shù)據(jù)處理技術(shù)是降低能耗的重要手段,而數(shù)據(jù)融合與數(shù)據(jù)路由相結(jié)合是實(shí)現(xiàn)網(wǎng)內(nèi)數(shù)據(jù)處理的重要方法l-3]。數(shù)據(jù)融合能減少數(shù)據(jù)
2023-09-21 08:29:44
優(yōu)缺點(diǎn),如表1所示。4 結(jié) 語這里介紹了幾類常用的無線傳感器網(wǎng)絡(luò)數(shù)據(jù)融合算法,并比較了其優(yōu)缺點(diǎn)。數(shù)據(jù)融合是實(shí)現(xiàn)無線傳感器節(jié)點(diǎn)節(jié)能目的的重要手段之一,目前的各種研究技術(shù)都還未成熟,新技術(shù)正不斷涌現(xiàn)。例如當(dāng)
2010-03-23 14:48:27
無線傳感器網(wǎng)絡(luò)(Wireless Sensor Network,WSN)集數(shù)據(jù)的采集、傳輸、融合分析于一體,在環(huán)境監(jiān)測(cè)、醫(yī)療監(jiān)護(hù)、城市交通管理、軍事偵察等領(lǐng)域具有廣闊的應(yīng)用前景。無線傳感器網(wǎng)絡(luò)
2020-04-07 06:56:34
, long-lived node have more better performance.[hide]無線傳感器網(wǎng)絡(luò)的數(shù)據(jù)融合研究.pdf[/hide]
2009-10-05 17:28:51
大增,這其中甚至有相互矛盾的信息,如何保證系統(tǒng)快速地處理數(shù)據(jù),過濾無用、錯(cuò)誤信息,從而保證系統(tǒng)最終做出及時(shí)正確的決策十分關(guān)鍵。
目前多傳感器融合的理論方法有貝葉斯準(zhǔn)則法、卡爾曼濾波法、D-S 證據(jù)
2020-07-31 06:35:12
1 4D數(shù)據(jù)與Labview控件場(chǎng)強(qiáng)是一個(gè)典型的四維數(shù)據(jù),他需要顯示場(chǎng)強(qiáng)隨三維坐標(biāo)x,y,z變化的程度。通常我們用顏色來區(qū)別不同幅度的場(chǎng)強(qiáng)。在本示例中需要顯示在汽車車門側(cè)測(cè)試的天線信號(hào)強(qiáng)度(RSSI
2015-07-11 13:34:08
我在使用電阻式觸摸屏的4D Systems Gen4 7“LCD顯示器上校準(zhǔn)觸摸屏?xí)r遇到問題。在顯示器中心附近,校準(zhǔn)非常接近但邊緣附近的距離超過0.25英寸。在左下方LCD的一角指針出現(xiàn)在觸摸點(diǎn)
2018-10-22 14:21:11
目標(biāo)檢測(cè)和圖像語義分割領(lǐng)域的性能評(píng)價(jià)指標(biāo)
2020-05-13 09:57:44
)、比較器和模數(shù)轉(zhuǎn)換器 (ADC) 組成的 MCU 集成模擬信號(hào)鏈采集的傳感器數(shù)據(jù)。這種基于 MCU 的方法在滿足特定應(yīng)用需求方面具有極大的靈活性。 沒有傳感器融合理論經(jīng)驗(yàn)的開發(fā)人員可以使用現(xiàn)成的庫開發(fā)經(jīng)過
2017-04-07 15:13:53
基于緊急數(shù)據(jù)優(yōu)先和自適應(yīng)控制的實(shí)時(shí)數(shù)據(jù)融合策略。 1實(shí)時(shí)數(shù)據(jù)融合策略 文本以最常用的分簇型拓?fù)浣Y(jié)構(gòu)的無線傳感器網(wǎng)絡(luò)為例進(jìn)行介紹。RDAUA策略的思想如下: ①節(jié)點(diǎn)根據(jù)數(shù)據(jù)語義和預(yù)先設(shè)定的規(guī)則
2018-11-07 16:00:31
傳感器工藝需求:肌肉骨骼疾病患者只需要在家中備有運(yùn)動(dòng)傳感器,然后連接到身體的適當(dāng)位置,并結(jié)合AI驅(qū)動(dòng)的用戶界面,平臺(tái)便可以獲取運(yùn)動(dòng)數(shù)據(jù)并提供即時(shí)反饋,請(qǐng)教老師目前哪些傳感器技術(shù)方便實(shí)現(xiàn)。
2020-03-09 13:17:30
傳感器工藝需求:肌肉骨骼疾病患者只需要在家中備有運(yùn)動(dòng)傳感器,然后連接到身體的適當(dāng)位置,并結(jié)合AI驅(qū)動(dòng)的用戶界面,平臺(tái)便可以獲取運(yùn)動(dòng)數(shù)據(jù)并提供即時(shí)反饋,請(qǐng)教老師目前哪些傳感器技術(shù)方便實(shí)現(xiàn)。
2020-03-07 12:47:05
本論文主要是研究遺傳編程( GP) 在多傳感器故障的數(shù)據(jù)融合診斷與恢復(fù)中的應(yīng)用,即用一種全新的數(shù)據(jù)處理方法應(yīng)用于多傳感器信息融合領(lǐng)域. 遺傳編程基于遺傳算法,可以能夠從一批
2009-06-30 08:48:56 15
15 多傳感器數(shù)據(jù)融合雖然未形成完整的理論體系和有效的融合算法, 但是在不少應(yīng)用領(lǐng)域根據(jù)各自的具體應(yīng)用背景, 已經(jīng)提出了許多成熟并且有效的融合方法。
2009-07-04 08:47:3913 介紹多傳感器數(shù)據(jù)融合的模型和基本方法及在智能傳感器中的應(yīng)用。中文還給出個(gè)數(shù)據(jù)融合在智能長(zhǎng)安區(qū)系統(tǒng)中的應(yīng)用實(shí)例。
2009-07-06 09:20:3331 對(duì)國(guó)內(nèi)外的多傳感器與數(shù)據(jù)融合技術(shù)的應(yīng)用及進(jìn)展進(jìn)行了跟蹤性研究,從原理上介紹其基本特點(diǎn)、方法和結(jié)構(gòu),并對(duì)其目前應(yīng)用現(xiàn)狀進(jìn)行了分析及展望。關(guān)鍵詞: 多傳感器; 數(shù)據(jù)融合
2009-07-10 08:53:0314 多被動(dòng)傳感器系統(tǒng)航跡融合原理開發(fā)
多被動(dòng)傳感器系統(tǒng)以其隱蔽特性得到重視,然而缺乏針對(duì)其獨(dú)有,特性的航跡融合法。本文分析了其信息接收特性和信息分
2010-02-26 16:43:1825 本文檔內(nèi)容介紹了基于傳感器數(shù)據(jù)的融合的設(shè)計(jì)指南,多傳感器數(shù)據(jù)融合是一個(gè)新興的研究領(lǐng)域,是針對(duì)一個(gè)系統(tǒng)使用多種傳感器這一特定問題而展開的一種關(guān)于數(shù)據(jù)處理的研究。多傳感器數(shù)據(jù)融合技術(shù)是近幾年來發(fā)展起來
2017-09-18 14:43:518 來自 MIT CSAIL 的研究人員開發(fā)了一種精細(xì)程度遠(yuǎn)超傳統(tǒng)語義分割方法的「語義軟分割」技術(shù),連頭發(fā)都能清晰地在分割掩碼中呈現(xiàn)。
2018-08-23 14:18:083630 CNN架構(gòu)圖像語義分割 圖像分割是根據(jù)圖像內(nèi)容對(duì)指定區(qū)域進(jìn)行標(biāo)記的計(jì)算機(jī)視覺任務(wù),簡(jiǎn)言之就是「這張圖片里有什么,其在圖片中的位置是什么?」本文聚焦于語義分割任務(wù),即在分割圖中將同一類別的不同實(shí)例視為
2018-09-17 15:21:01421 這一新架構(gòu)“全景 FPN ”在 Facebook 2017 年發(fā)布的 Mask R-CNN 的基礎(chǔ)上添加了一個(gè)用于語義分割的分支。這一新架構(gòu)可以同時(shí)對(duì)圖像進(jìn)行實(shí)例和語義分割,而且精確度與只進(jìn)行實(shí)例或語義分割的神經(jīng)網(wǎng)絡(luò)相當(dāng),這相當(dāng)于能將傳統(tǒng)方法所需要的計(jì)算資源減半。
2019-04-22 11:46:572598 
DeepLab是谷歌使用tensorflow基于CNN開發(fā)的語義分割模型,至今已更新4個(gè)版本。最新版本是DeepLabv3+,在此模型中進(jìn)一步將深度可分離卷積應(yīng)用到孔空間金字塔池化和解碼器模塊,從而
2019-10-24 08:00:0011 圖像語義分割是圖像處理和是機(jī)器視覺技術(shù)中關(guān)于圖像理解的重要任務(wù)。語義分割即是對(duì)圖像中每一個(gè)像素點(diǎn)進(jìn)行分類,確定每個(gè)點(diǎn)的類別,從而進(jìn)行區(qū)域劃分,為了能夠幫助大家更好的了解語義分割領(lǐng)域,我們精選
2020-11-05 10:34:274435 繼大華AI取得KITTI語義分割競(jìng)賽第一之后,近日,大華股份基于深度學(xué)習(xí)算法的語義分割技術(shù),刷新了Cityscapes數(shù)據(jù)集中語義分割任務(wù)(Pixel-Level Semantic Labeling
2020-11-05 18:29:093895 語義分割和弱監(jiān)督學(xué)習(xí)圖像語義分割,對(duì)每種方法中代表性算法的效果以及優(yōu)缺點(diǎn)進(jìn)行對(duì)比與分析,并闡述深度神經(jīng)網(wǎng)絡(luò)對(duì)語義分割領(lǐng)域的貢獻(xiàn)。在此基礎(chǔ)上,歸納當(dāng)前主流的公共數(shù)據(jù)集和遙感數(shù)據(jù)集,對(duì)比主要的圖像語義分割方法的
2021-03-19 14:14:0621 為改善單目圖像語義分割網(wǎng)絡(luò)對(duì)圖像深度變化區(qū)域的分割效果,提出一種結(jié)合雙目圖像的深度信息和跨層次特征進(jìn)行互補(bǔ)應(yīng)用的語義分割模型。在不改變已有單目孿生網(wǎng)絡(luò)結(jié)構(gòu)的前提下,利用該模型分別提取雙目左、右輸入
2021-03-19 14:35:2420 近年來,深度傳感器和三維激光掃描儀的普及推動(dòng)了三維點(diǎn)云處理方法的快速發(fā)展。點(diǎn)云語義分割作為理解三維場(chǎng)景的關(guān)鍵步驟,受到了研究者的廣泛關(guān)注。隨著深度學(xué)習(xí)的迅速發(fā)展并廣泛應(yīng)用到三維語義分割領(lǐng)域,點(diǎn)云語義
2021-04-01 14:48:4616 圖像語義分割是計(jì)算機(jī)視覺領(lǐng)堿近年來的熱點(diǎn)硏究課題,隨著深度學(xué)習(xí)技術(shù)的興起,圖像語義分割與深度學(xué)習(xí)技術(shù)進(jìn)行融合發(fā)展,取得了顯著的進(jìn)步,在無人駕駛、智能安防、智能機(jī)器人、人機(jī)交互等真實(shí)場(chǎng)景應(yīng)用廣泛。首先
2021-04-02 13:59:4611 基于語義分割的輸電線路中防震錘識(shí)別
2021-06-29 16:29:0315 隨著5G商用提速,物聯(lián)網(wǎng)的發(fā)展步伐將加快,屆時(shí)聯(lián)網(wǎng)設(shè)備規(guī)模出貨將帶動(dòng)上游芯片、傳感器等元器件出貨。物聯(lián)網(wǎng)時(shí)代來臨,MEMS 是傳感器的主流技術(shù),將迎來傳感器與AI 融合的革新。
2022-04-06 13:51:381274 本文探討了普通視覺Transformer(ViT)用于語義分割的能力,并提出了SegViT。以前基于ViT的分割網(wǎng)絡(luò)通常從ViT的輸出中學(xué)習(xí)像素級(jí)表示。不同的是,本文利用基本的組件注意力機(jī)制生成語義分割的Mask。
2022-10-31 09:57:413801 (Graph partitioning segmentation methods),在深度學(xué)習(xí)(Deep learning, DL)“一統(tǒng)江湖”之前,圖像語義分割方面的工作可謂“百花齊放”。
2023-04-20 10:01:331891 語義分割是計(jì)算機(jī)視覺領(lǐng)域中的一個(gè)重要問題,它的目標(biāo)是將圖像或視頻中的語義信息(如人、物、場(chǎng)景等)從背景中分離出來,以便于進(jìn)行目標(biāo)檢測(cè)、識(shí)別和分類等任務(wù)。語義分割數(shù)據(jù)集是指用于訓(xùn)練和測(cè)試語義分割算法的數(shù)據(jù)集合。本文將從語義分割數(shù)據(jù)集的理論和實(shí)踐兩個(gè)方面進(jìn)行介紹。
2023-04-23 16:45:00473 隨著人工智能技術(shù)的不斷發(fā)展,語義分割標(biāo)注已經(jīng)成為計(jì)算機(jī)視覺領(lǐng)域的一個(gè)熱門話題。語義分割是指將圖像中的每個(gè)像素分配給一個(gè)預(yù)定義的語義類別,以便在計(jì)算機(jī)視覺應(yīng)用中進(jìn)行分類和分析。標(biāo)注語義分割的圖像可以幫助計(jì)算機(jī)視覺系統(tǒng)更好地理解和分析圖像中的內(nèi)容,并在許多任務(wù)中取得更好的性能。
2023-04-30 21:20:24721 電子發(fā)燒友網(wǎng)站提供《PyTorch教程14.9之語義分割和數(shù)據(jù)集.pdf》資料免費(fèi)下載
2023-06-05 11:10:380 14.9. 語義分割和數(shù)據(jù)集? Colab [火炬]在 Colab 中打開筆記本 Colab [mxnet] Open the notebook in Colab Colab [jax
2023-06-05 15:44:37375 
深度學(xué)習(xí)推動(dòng)了自動(dòng)駕駛感知技術(shù)的最新進(jìn)展。為了實(shí)現(xiàn)魯棒和準(zhǔn)確的場(chǎng)景理解,自動(dòng)駕駛汽車通常配備不同的傳感器(如相機(jī)、激光雷達(dá)、雷
達(dá)),多種傳感模式可以融合利用它們的互補(bǔ)特性。在此背景下,人們提出
2023-06-06 10:37:110 3.2.4語義分割圖3-7所示為機(jī)器視覺語義分割示例。計(jì)算機(jī)視覺的核心是分割,它將整個(gè)圖像分成一個(gè)個(gè)像素組,然后對(duì)其進(jìn)行標(biāo)記和分類。語義分割試圖在語義上理解圖像中每個(gè)像素的角色(例如,識(shí)別它是道路
2022-03-07 09:35:42279 
深度學(xué)習(xí)在圖像語義分割上已經(jīng)取得了重大進(jìn)展與明顯的效果,產(chǎn)生了很多專注于圖像語義分割的模型與基準(zhǔn)數(shù)據(jù)集,這些基準(zhǔn)數(shù)據(jù)集提供了一套統(tǒng)一的批判模型的標(biāo)準(zhǔn),多數(shù)時(shí)候我們?cè)u(píng)價(jià)一個(gè)模型的性能會(huì)從執(zhí)行時(shí)間、內(nèi)存使用率、算法精度等方面進(jìn)行考慮。
2023-10-09 15:26:12120 
多傳感器數(shù)據(jù)融合是一個(gè)綜合處理多傳感器數(shù)據(jù)的過程,以提高對(duì)環(huán)境或目標(biāo)的感知和解釋能力。在這個(gè)過程中,各種數(shù)據(jù)融合算法起著至關(guān)重要的作用。本文將深入探討多傳感器數(shù)據(jù)融合算法中最關(guān)鍵的方面。 一、傳感器
2023-12-13 11:00:01262
 電子發(fā)燒友App
電子發(fā)燒友App









 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論