 電子發燒友App
電子發燒友App


1.自動駕駛技術的發展趨勢與 AI 應用現狀分析
1.1 自動駕駛技術發展現狀
自動駕駛汽車是一個機電一體、軟硬件高度集成、以最終實現替代人操作的復雜信息物理融合系統,主要由感知、決策和執行子系統構成,自動駕駛技術涉及環境感知、決策規劃、控制執行、V2X 通信等關鍵技術,其結構如圖 1 所示。
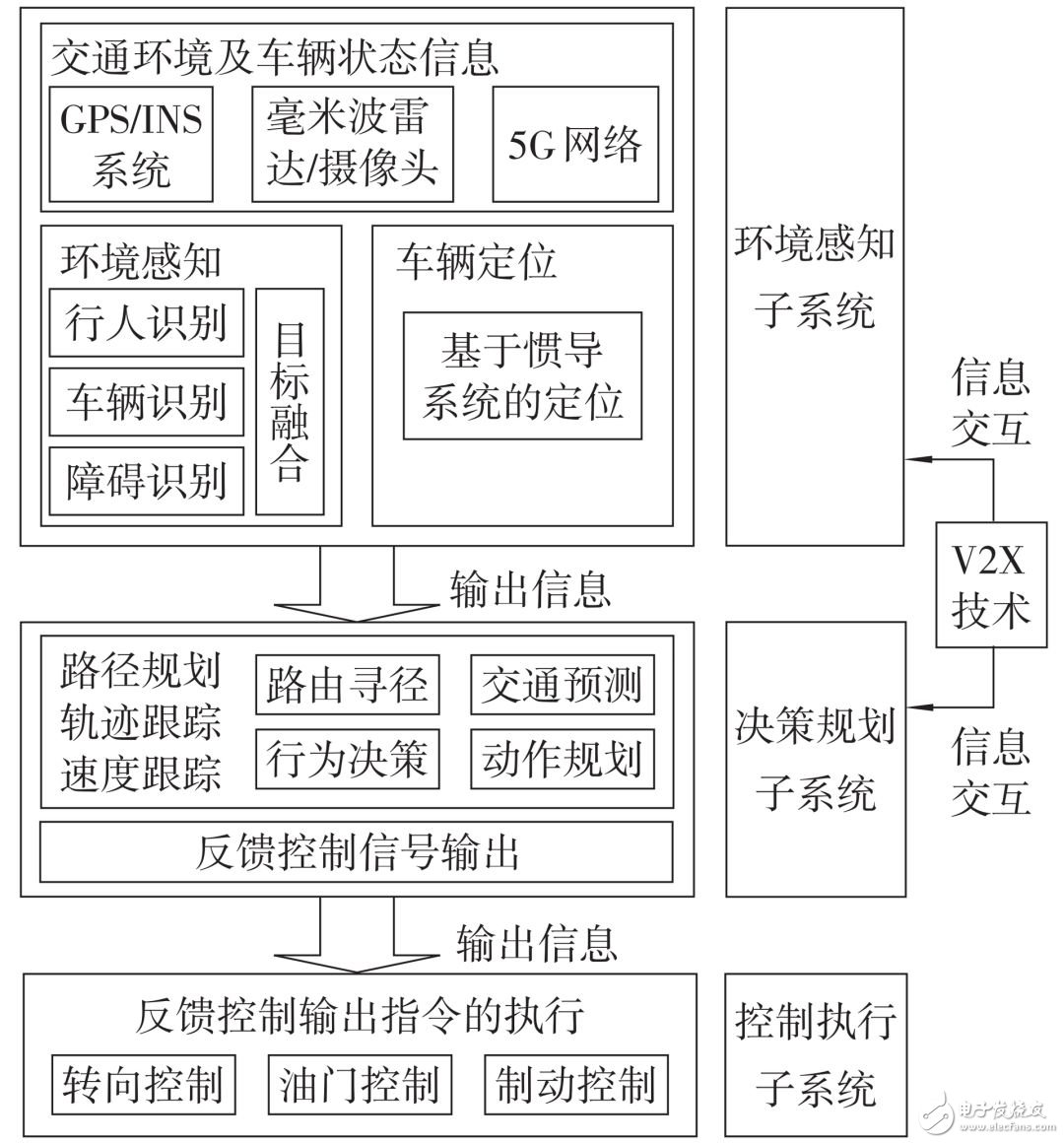
圖 1 自動駕駛汽車分層結構示意圖
1.1.1 自動駕駛發展路線

1.1.2 我國自動駕駛技術發展現狀
1.2 AI 在自動駕駛中的應用現狀與挑戰
1.2.1人工智能技術簡介
AI 是一門研究模擬、延伸和擴展人類智能的理論、方法及技術的科學,其誕生于 20 世紀 50 年代,目前發展為計算機視覺、自然語言理解與交流、認知與推理、機器人學、博弈與倫理和機器學習六大領域,并呈現出各領域相互滲透的趨勢。
其中,機器學習研究如何在算法的指導下自動學習輸入數據樣本的數據結構和內在規律并獲得新的經驗與知識,從而對新樣本進行智能識別,甚至對未來進行預測 。典型的機器學習算法有線性回歸、K-均值、K-近鄰、主成份分析、支持向量機、決策樹、人工神經網絡等。
在人工神經網絡基礎上發展起來的深度學習模型是當前最為有效的機器學習算法模型之一,成為當前人工智能研究與應用的熱點。深度學習模型在人工神經網絡中加入了多個隱層,于 2006 年由 Geoffrey Hinton 和 Ruslan Salakhutdinov 提出。由于在 2012 年的 ImageNet 比賽(計算機視覺領域最具影響力的國際比賽)中成績突出,深度學習模型受到社會各界的極大關注,并在多個領域取得研究進展,出現了一批成功的商業應用,如谷歌翻譯、蘋果語音工具 Siri、微軟的 Cortana 個人語音助手、螞蟻金服的掃臉技術、谷歌的 AlphaGo 等。
1.2.2 人工智能在自動駕駛技術中的應用
AI 在自動駕駛技術中有著豐富的應用,諸如深度學習、增強學習都在自動駕駛技術中取得較好的研究結果。
1)環境感知領域
感知處理是 AI 在自動駕駛中的典型應用場景。如基于 HOG 特征的行人檢測技術在提取圖像的 HOG 特征后通常通過支持向量機算法進行行人檢測;基于激光雷達與攝像頭的車輛檢測技術中,需對激光雷達數據做聚類處理;線性回歸算法、支持向量機算法、人工神經網絡算法也常被用于車道線和交通標志的檢測。
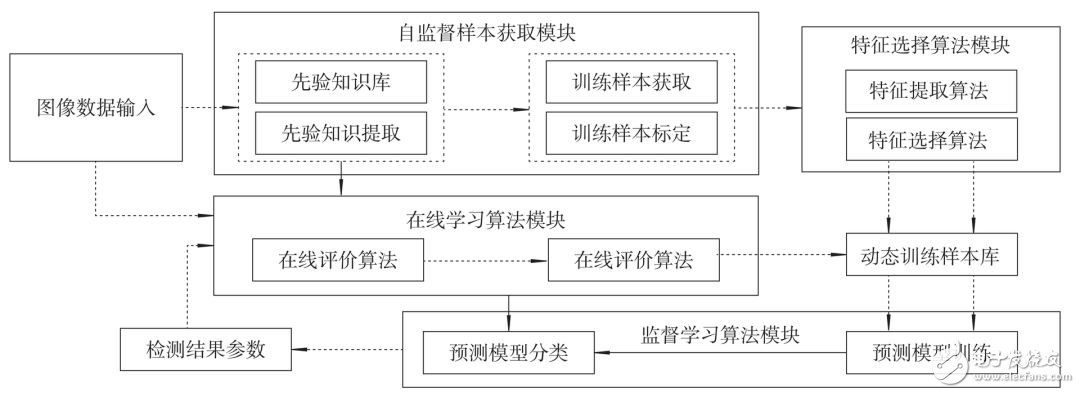
圖 2 基于機器學習的非結構化道路檢測框架
圖 2[7]所示的框架把機器學習用到鄉村公路、野外土路等非結構化道路的檢測中。由于車輛行駛環境復雜,已有感知技術在檢測與識別精度方面尚無法滿足自動駕駛的需要,基于深度學習的圖像處理成為自動駕駛視覺感知的重要支撐[8]。在感知融合環節,常用的 AI 方法有貝葉斯估計、統計決策理論、證據理論、模糊推理,、神經網絡以及產生式規則等。
2)決策規劃領域
決策規劃處理是 AI 在自動駕駛中的另一個重要應用場景,狀態機、決策樹、貝葉斯網絡等 AI 方法已有大量應用。近年來興起的深度學習與強化學習能通過大量學習實現對復雜工況的決策,并能進行在線學習優化,由于需要較多的計算資源,當前是計算機與互聯網領域研究自動駕駛規劃決策處理的熱門技術 [8]。
3)控制執行領域
傳統控制方法有 PID 控制、滑模控制、模糊控制、模型預測控制等。智能控制方法主要有基于模型的控制、神經網絡控制和深度學習方法等。
1.2.3 自動駕駛領域AI應用面臨的挑戰
當前,以深度學習為代表的當代 AI 技術,基于在機器視覺(MV)、自然語言處理(NLP)等領域的成功應用,被引入到自動駕駛技術的環境感知、決策規劃和控制執行的研究中,獲得了較好的效果。
由于車輛行駛環境復雜,一些嚴重依賴于數據、計算資源和算法的 AI 技術,在自動駕駛的感知、決策、執行等環節尚無法滿足實時性需求,一些以其作為核心支撐的自動駕駛系統原型面臨挑戰:
1)實時可靠性需求給系統的計算速度和計算可靠性帶來挑戰。自動駕駛系統要求感知、決策和執行各子系統的響應必須是實時可靠的,因此需要系統提供高速可靠的計算能力。
2)部件小型化的產業化需求使目前系統龐大的硬件尺寸面臨挑戰。當前的自動駕駛系統原型大多是計算機系統或工控機系統,不滿足車規級部件需求。
3)個性化適配無法滿足。當前興起的深度學習算法對應用環境變異的自適應性較差,對不同車型和不同場景存在模型重新訓練的適配問題,已有的自動駕駛系統原型不能滿足。
4)自主學習、自主維護需求無法滿足。深度學習呈現出學習集越大,效果越好的特點,由此需要自動駕駛系統具備持續自主學習能力,而已有的自動駕駛原型無法滿足。面對老化、磨損等問題,部件出廠時的標定參數不再處于最優狀態,自動駕駛系統需要基于汽車行駛數據、性能評價進行智能整定(自標定)、診斷和維護,已有的自動駕駛原型也無法滿足需求。
5)成本控制面臨挑戰。當前自動駕駛系統原型造價尚不滿足產業化成本需求。
上述問題本質上是由于智能駕駛單車數據積累深度與廣度不足、強計算能力欠缺、任務自適應能力差、AI 算法優化適配困難。為解決上述問題,完成 AI 在車載終端的深度集成應用,考慮構建車云協同一體的智能駕駛系統。借助云平臺靈活、豐富的計算資源,處理復雜的 AI 算法,并將分析結果發給車端進行實時決策規劃,使云端域作為具有網絡功能開放的大腦和核心,成為連接網絡內部和車端業務需求的紐帶,借此真正實現網絡智能化。基于云計算和大數據技術的發展,把自動駕駛系統分為車、云(平臺)兩層,提出車云協同自動駕駛系統架構。在云端提供數據存儲、數據共享和計算資源,支持深度學習、自主學習、自主維護和個性化適配等復雜 AI 算法。通過部分軟/硬件共享技術,可降低車端成本,使計算量減少,有利于車端嵌入式 AI 硬件產品的研發,以滿足車規級部件的需求。
2. 基于 AI 的車云協同自動駕駛系統架構及關鍵技術
圍繞 AI 技術應用于自動駕駛中的數據、計算與算法三大要素,面向多車型、多場景與個性化智能駕駛需求,針對智能駕駛單車系統面臨的等問題,提出一種基于 AI 的車云協同的自動駕駛系統架構方案,如圖 3 所示。
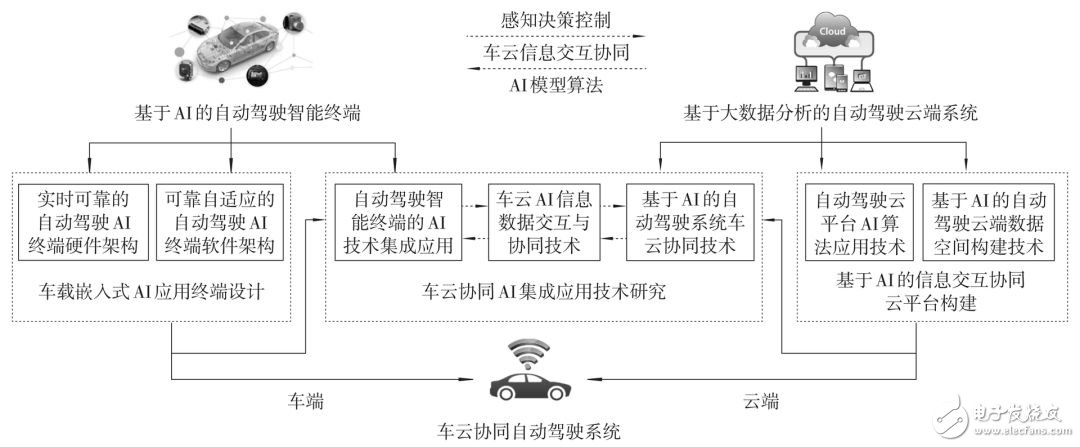
圖 3 基于 AI 的車云協同自動駕駛系統架構方案示意圖
該架構方案由基于 AI 的自動駕駛智能車端設備和基于大數據分析的自動駕駛云端系統兩部分組成,共同形成一個集復雜環境精確感知、通行智慧決策與行車控制優化執行的車云協同一體自動駕駛系統。
2.1 基于 AI 的自動駕駛智能終端
自動駕駛智能終端是一個集環境感知、規劃決策、執行控制等多項功能于一體的信息物理融合系統(CPS)[9]。為適應不同場景不同車型汽車自動駕駛的應用需求,需深入研究自動駕駛汽車嵌入式智能控制器軟硬件協同設計技術,建立可承載集傳感器數據采集、環境感知數據融合、規劃決策,執行控制 AI 算法為一體,滿足自動駕駛行車需求的智能終端軟硬件體系架構,設計實時可靠、具有系統容錯和“跛行”能力的自動駕駛汽車 AI 終端,提出實時可靠、任務自適應的智能終端專用系統軟件,實現 AI 算法的系統集成驗證與實車應用。需突破的關鍵技術包括實時可靠的自動駕駛 AI 終端硬件架構、可靠自適應的自動駕駛 AI 終端軟件架構和自動駕駛智能終端的 AI 技術集成應用等。
1)自動駕駛 AI 終端硬件架構
自動駕駛汽車 AI 終端是一個集環境感知、規劃決策、控制執行等多項功能于一體的綜合智能系統。根據自動駕駛系統在典型應用場景中針對環境感知、規劃決策以及執行控制等業務模塊體現出的不同任務分工、工作模式及通信互聯方式,研究自動駕駛 AI 終端的系統可靠性設計及模塊化設計方法,重點研究基于 GPU 和 MCU 的異構多核硬件系統架構和基于以太網的高速互聯通信架構。
2)自動駕駛 AI 終端軟件架構
自動駕駛車端系統集成了多個軟件功能模塊(環境感知、規劃決策、執行控制、導航、定位、交通信號監測等)和多個硬件執行單元(計算單元、控制單元、傳感器等),研究:
基于 AI 的感知、規劃、執行等功能性應用軟件系統架構與層次化、模塊化的設計方法;
基于任務自適應的系統軟件和應用軟件最優構架;
確保合理分配和調度包括 GPU、CPU、內存、總線和通信接口等在內的軟硬件資源,提供系統自我修復能力、模塊資源隔離能力、計算與內存資源分配能力、優先級執行能力,以及模塊間有效通信能力等。
3)自動駕駛 AI 終端的技術集成應用
自動駕駛系統作為一個典型的物理信息融合系統,必須通過 AI 方法的綜合運用才能實現進行數據信息和知識信息的綜合集成。
針對自動駕駛智能終端的有限軟硬件資源,構建面向自動駕駛智能終端的 AI 操作系統,使自動駕駛的感知融合、決策控制等任務能夠實時執行。










 工商網監
工商網監
評論