 電子發(fā)燒友App
電子發(fā)燒友App


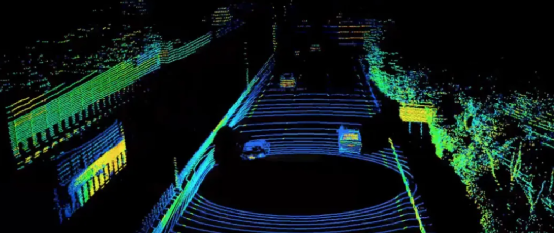
隨著激光雷達(dá)、4D毫米波雷達(dá)逐漸成為汽車領(lǐng)域的頂流,其輸出的點云(Point Cloud)也成為繼像素之后描述車輛所處三維世界的一種主要數(shù)據(jù)格式。點云其實就是一個數(shù)據(jù)集,不同類型傳感器輸出的點云包含的數(shù)據(jù)略有差異。對于激光雷達(dá)來說,其輸出的點云一般包括三維空間坐標(biāo)(x,y,z)、反射強(qiáng)度信息、時間戳等數(shù)據(jù)。
?
但是,受傳感器視場角限制,單個傳感器往往只能獲得有限視野范圍內(nèi)的點云,如何才能生成完整場景的三維點云,以便支持后續(xù)的物體識別、分類及路徑規(guī)劃?自動駕駛車輛預(yù)先存儲了某一區(qū)域的高精度點云地圖,如何通過車輛傳感器實時獲取的點云確定車輛當(dāng)前的位置信息?在初始姿態(tài)信息已知,如何通過車輛傳感器采集的前后兩幀點云估計相對姿態(tài)變化信息?
? 點云配準(zhǔn)作為點云處理整個Pipeline中的重要一環(huán),便是解決上述問題的良方妙藥。自動駕駛?cè)谠挼诙钠冢覀兙蛠?a href="http://www.asorrir.com/v/tag/858/" target="_blank">科普一下什么是點云配準(zhǔn),點云配準(zhǔn)的作用,常用的點云配準(zhǔn)方法以及未來的發(fā)展方向。
? ? 定義
? 點云配準(zhǔn)(Pont Cloud Registration),又名點云拼接、點云注冊,對于兩幀有重疊信息的點云,通過求解變換矩陣(旋轉(zhuǎn)矩陣R和平移矩陣T),使得重疊部分點云變換到同一個統(tǒng)一的坐標(biāo)系下。
? 點云配準(zhǔn)史上經(jīng)歷了人工、半自動、自動配準(zhǔn)階段。人工配準(zhǔn),指的是工程師通過手眼調(diào)整兩幅點云,直至達(dá)到人眼意義上的配準(zhǔn)。半自動配準(zhǔn),是指依賴儀器進(jìn)行配準(zhǔn)。自動配準(zhǔn),是指利用一定的算法,自動完成兩幀點云的配準(zhǔn),這也是本文所要重點介紹的內(nèi)容。
? 點云配準(zhǔn)包含粗配(Coarse Registration)準(zhǔn)和精配準(zhǔn)(Fine Registration)兩步。粗配準(zhǔn)指的是在兩幀點云位置相差較大,相對位姿完全未知的情況下進(jìn)行較為粗糙的配準(zhǔn),目的是為后續(xù)精配準(zhǔn)提供較好的變換初值。精配準(zhǔn)在給定初始變換矩陣條件下,進(jìn)一步優(yōu)化得到更精確的變換。
? ? 作用
? 地圖構(gòu)建。在高精地圖制作環(huán)節(jié)中,制作點云地圖是第一步。通過對不同位置采集的連續(xù)幀點云進(jìn)行配準(zhǔn),可以將不同位置的多幀點云統(tǒng)一到同一坐標(biāo)系,構(gòu)建場景的完整點云地圖。
? 高精定位。對于自動駕駛來說,獲取準(zhǔn)確的定位是一切豐滿理想實現(xiàn)的前提。刨去Tesla,其他絕大多數(shù)自動駕駛公司都將高精地圖作為實現(xiàn)準(zhǔn)確定位的必備武器。而通過點云配準(zhǔn)技術(shù),可以將車輛傳感器實時掃描到的點云與已經(jīng)預(yù)存的高精點云地圖進(jìn)行匹配,并將得到的定位結(jié)果與GNSS輸出、IMU輸出、里程計輸出等融合,實現(xiàn)車輛最終高精定位結(jié)果輸出。
? 姿態(tài)估計。通過對車輛傳感器實時獲得的前后兩幀點云進(jìn)行配準(zhǔn),可以估計出車輛的相對姿態(tài)信息。
? ? 方法
? ? 一、ICP
? ICP(Iterative Closest Point,迭代最近點)應(yīng)該是最為經(jīng)典的配準(zhǔn)方法之一,從1992年P(guān).J.Besl提出,到今天(2022年),已經(jīng)整整三十年,但I(xiàn)CP的光芒卻絲毫未減。從最早的點到點ICP,發(fā)展出了點到線ICP,點到面ICP及面到面ICP等方法,共同奠定ICP方法在點云配準(zhǔn)領(lǐng)域的劃時代的意義。
? 最早的點到點ICP方法的核心思想很簡單:空間位置上同一個點在兩幀點云中距離是最近的,利用平移旋轉(zhuǎn)變換后,讓這兩幀點云在相同位置的坐標(biāo)盡可能拉近甚至相等,以達(dá)到配準(zhǔn)的效果。
? 點到點ICP方法包含對應(yīng)點搜索和變換估計兩個階段,對應(yīng)點搜索是指在兩幀點云中找到每個點的匹配點,變換估計就是利用對應(yīng)關(guān)系來估計變換矩陣。這兩個階段將不斷進(jìn)行迭代,使得對應(yīng)關(guān)系越來越準(zhǔn)確,從而找到最佳的變換矩陣。 點到點ICP方法實現(xiàn)過程用數(shù)學(xué)語言可以描述為:
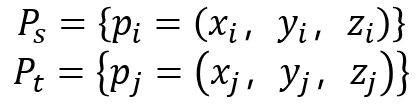
? (1)給定待配準(zhǔn)點云PS,也就是當(dāng)前傳感器掃描到的點云,里面由n個三維點pi組成。同時我們有目標(biāo)點云Pt,可以是預(yù)先建好的高精點云地圖,也可以是其他位置傳感器采集的但有重疊區(qū)域的點云,里面同樣包含一系列三維點pj組成。
(2)而我們要做的就是尋找一個3x3旋轉(zhuǎn)矩陣R和3x1平移矩陣t,使得下式取值最小。
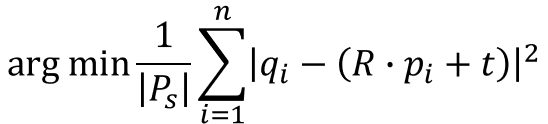
(3)采用四元數(shù)法或SVD方法求解上R和t的值。
? 一步到位尋找兩幀點云最近點,需要將待配準(zhǔn)點云中每個點依次和目標(biāo)點云中每個點進(jìn)行距離計算,不僅計算復(fù)雜度高,而且計算耗時久。因此通常設(shè)置距離閾值來加速這一過程,當(dāng)待配準(zhǔn)點云中的一個點與目標(biāo)點云中的一個點距離小于一定閾值時就認(rèn)為找到了對應(yīng)點,不再遍歷待配準(zhǔn)點云和目標(biāo)點云中每個點。
? 經(jīng)過一次迭代,調(diào)整一些對應(yīng)點對的權(quán)重以及剔除一些不合理的對應(yīng)點對,我們可以得到一個臨時變換點云。通過計算代價函數(shù),我們便可以得到臨時變換點云和目標(biāo)點云對應(yīng)的最優(yōu)變換。然后利用這個臨時點云和目標(biāo)點云再進(jìn)行比較,再得到一個變換點云及最優(yōu)變換,不斷迭代這一過程,直到找到待配準(zhǔn)點云中每一個點在目標(biāo)點云中的最近點及全局最優(yōu)變換。
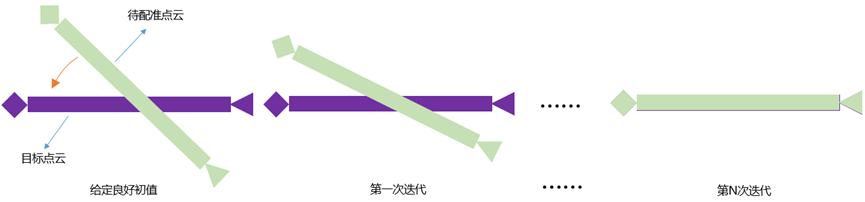
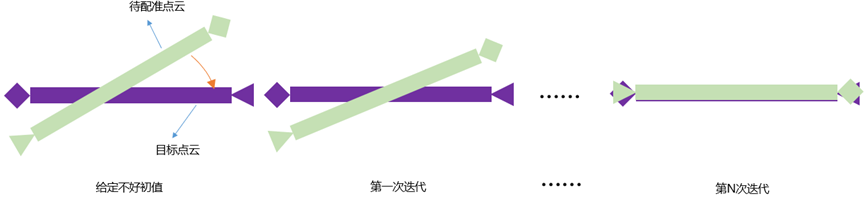
? 形象化的配準(zhǔn)過程如下圖所示。在給定良好初值的兩幀點云中,通過不斷迭代,待配準(zhǔn)點云沿箭頭指向方向不斷向目標(biāo)點云靠近,并最終實現(xiàn)目標(biāo)點云和待配準(zhǔn)點云的配準(zhǔn)。
?
點到點ICP方法以簡單著稱,不需要對點云進(jìn)行分割和特征提取,不需要訓(xùn)練數(shù)據(jù),可以較好的推廣到未知場景。且在初值較好情況下,嚴(yán)密的數(shù)學(xué)理論可以保證較好的精度和收斂性。
? 但是點到點ICP方法遍歷所有點云,在點云數(shù)量較大時,計算量是驚人的。同時點到點ICP方法只考慮點與點的距離,缺少對點云特征信息的利用,在所處環(huán)境不斷變化以及測量誤差影響下,會產(chǎn)生較大的配準(zhǔn)誤差。而最致命的問題是,點對點ICP方法初始值敏感,容易陷入局部最優(yōu),導(dǎo)致配準(zhǔn)失敗。
? 當(dāng)上圖在初值不好的情況下,如下圖所示。按照對應(yīng)點距離最小原則,待配準(zhǔn)點云將按箭頭指示順時針方向旋轉(zhuǎn)。這種情況雖然會導(dǎo)致兩邊對應(yīng)點距離變遠(yuǎn),但是刨去兩邊的剩余大部分點距離在減少。這也就是點到點ICP方法因初值不好帶來的局部最優(yōu)問題。
?
而為了解決遍歷點云中所有點引入的高計算量,點到點ICP方法引入特征點的概念。特征點是指點云中具有代表性的點,能夠盡可能代表點云的有效空間信息,比如拐角點,凸凹分界處的點等。通過對點云做特征點提取,然后再使用點到點ICP方法,可以顯著減少運算量,保持較高的精度。
? 而為了優(yōu)化局部最優(yōu)問題,出現(xiàn)了一些ICP改進(jìn)算法,包括點到面ICP,面到面ICP等。
? 點到面ICP考慮待配準(zhǔn)點云頂點到目標(biāo)點云頂點所在面的距離,比起直接計算點到點距離,考慮了目標(biāo)點云的局部結(jié)構(gòu),精度更高,不容易陷入局部最優(yōu)。但是點到面ICP是一個非線性問題,速度比較慢,效率較低。
? 面到面ICP考慮待配準(zhǔn)點云頂點所在的面和目標(biāo)點云頂點所在面的距離,同時考慮了待配準(zhǔn)點云和目標(biāo)點云的局部結(jié)構(gòu),精度更高,更不易陷入局部最優(yōu)。但是同樣作為一個非線性優(yōu)化問題,速度更慢,效率更低。
? 因此點到點ICP方法常用于粗配準(zhǔn)完成,已有較好初值的精配準(zhǔn)階段。
? 二、NDT
? NDT(Normal Distribution Transform,正態(tài)分布變換),將目標(biāo)點云(可以是高精點云地圖)轉(zhuǎn)換為多維變量的正態(tài)分布,并采用最優(yōu)化技術(shù)尋找最優(yōu)變換,使得待配準(zhǔn)點云經(jīng)過變換之后在目標(biāo)點云中的概率密度之和最大。
? NDT方法實現(xiàn)過程用數(shù)學(xué)語言可以描述為:
? (1)將目標(biāo)點云劃分為一個個規(guī)格的網(wǎng)格(對于2D點云來說,是2D平面;對于3D點云來說,是3D立方體),同時保證每個網(wǎng)格中最少包含6個點。
? (2)假設(shè)每個網(wǎng)格中的點均服從正態(tài)分布,并計算每個網(wǎng)格中點的均值向量q和協(xié)方差矩陣C。
? (3)基于以上信息,對網(wǎng)格中每個點X進(jìn)行正態(tài)分布建模N(q,C),我們便可以得到這個網(wǎng)格單元中每個點的高斯概率密度函數(shù)P(X)。
?
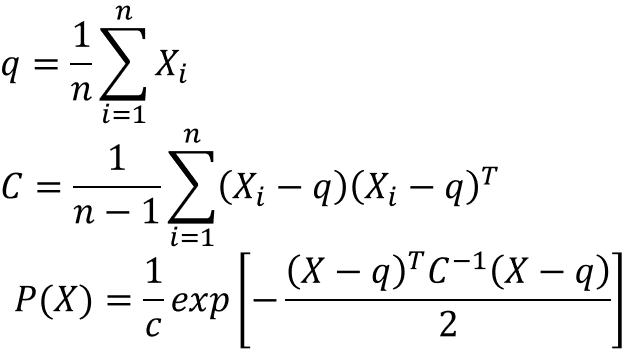
式P(X)中,c為歸一化常數(shù)。同時我們看到本式中對協(xié)方差矩陣C求逆,如果單元格中的點數(shù)太少會導(dǎo)致協(xié)方差矩陣條件數(shù)過大而導(dǎo)致誤差過大,故上文要求單元格至少包含六個點。同時每個P(X) 可以看作是單元格表面的近似表達(dá),描述了單元格表面的位置以及它的方向和平滑度。
? 隨后我們會給定一個初始變換矩陣,將待配準(zhǔn)點云變換并貼近目標(biāo)點云,這樣一來待配準(zhǔn)點云上的點就會落在目標(biāo)點云劃分的網(wǎng)格單元中。以一個網(wǎng)格單元舉例,將待配準(zhǔn)點云中落入這個網(wǎng)格單元中的點Y帶入上文的P(X)中,可得到這個點在這個網(wǎng)格單元中的概率值,這個值是一個似然值。
? 同時為了減少格子離散化,不連續(xù)的影響,我們對這個網(wǎng)格單元分別向下、向左、向下后再向左平移,這樣我們可得到另外三個網(wǎng)絡(luò)單元。而這個點在另外三個網(wǎng)格單元中分別會有一個概率值,將這四個值加起來,作為待配準(zhǔn)點云這個點總的得分(Score)。
?

落在目標(biāo)點云網(wǎng)格單元中的每個點都有一個Score值,將所有Score值相乘就是我們的目標(biāo)函數(shù)了,而我們最終的目的就是找到最優(yōu)的參數(shù)使得目標(biāo)函數(shù)得分最大(最大似然),那我們也便認(rèn)為配準(zhǔn)了。可以理解為,在目標(biāo)點云中點出現(xiàn)概率大的地方,待配準(zhǔn)點云應(yīng)盡量占據(jù)這些位置。
? NDT方法通過網(wǎng)格劃分技術(shù),可以支持更大、更稠密的點云地圖配準(zhǔn)。且在配準(zhǔn)過程中不利用對應(yīng)點的特征計算和匹配,所以相比ICP效率更高,計算資源消耗更少。且當(dāng)需要配準(zhǔn)的兩幀點云重疊率低,并且結(jié)構(gòu)化不明顯(平面較少)時,NDP比點ICP更加準(zhǔn)確。
? 三、深度學(xué)習(xí)
? 深度學(xué)習(xí)在自動駕駛領(lǐng)域可謂無往不利,點云配準(zhǔn)領(lǐng)域也不例外。基于深度學(xué)習(xí)的點云配準(zhǔn)算法不斷被提出,包括PointNetLK、DCP、IDAM、RPM-Net、3DRegNet等,且這些深度學(xué)習(xí)模型在實驗室中已經(jīng)證明性能與速度上均遠(yuǎn)超ICP和NDP方法。而在復(fù)雜的實際場景效果如何,值得我們持續(xù)關(guān)注。
? ? ? 初值獲取
? ? 對于ICP來說,初值的好壞在很大程度上決定了兩幀點云配準(zhǔn)的結(jié)果。對于NDT來說,雖說對初值不敏感(兩幀點云位置3m以內(nèi),角度+/-45°范圍),但良好的初值有利于提高配置的效率和質(zhì)量。不同的車輛配置決定了不同的初值獲取方法。對于只有激光雷達(dá)配置的車輛,可以采用上一幀的變換結(jié)果作為初值。
? 對于配置有IMU和里程計的車型,IMU的加速度測量比較準(zhǔn),積分出來的速度和位移會有累計誤差。里程計的速度測量比較準(zhǔn),而根據(jù)運動模型計算出來的加速度會有一定誤差。因此針對此種配置,使用IMU的加速度測量結(jié)果和里程計的速度測量結(jié)果融合一個初值,會是非常可靠的一個結(jié)果。
? 對于配置GNSS的車型,如果GNSS還能輸出航向角,那么直接用GNSS的輸出作為初值。對于無法輸出航向角的GNSS,通過連續(xù)的位置坐標(biāo),也可以計算一個平面運動的航向角。
? ? 展望
? ? 單一傳感器的點云配準(zhǔn)已有成熟的算法,但可以看到,每種方法都存在局限性,無法滿足自動駕駛?cè)珗鼍暗狞c云配準(zhǔn)需求,如何取長補(bǔ)短成為單一傳感器點云配準(zhǔn)發(fā)展的重要道路。
? 隨著多傳感器融合成為主旋律,不同類別傳感器獲取的點云進(jìn)行配準(zhǔn)就顯得重要且必須。但由于這方面的研究剛剛起步,僅有一些實驗室階段的優(yōu)化策略和深層次的神經(jīng)網(wǎng)絡(luò)模型,如何訓(xùn)練出可以上路的神經(jīng)網(wǎng)絡(luò)模型,值得萬眾期待。
? ?
編輯:黃飛
?










 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論