 電子發燒友App
電子發燒友App


前言
我國汽車保有量正保持逐年遞加的趨勢,汽車行業內的競爭壓力正在逐漸增大,消費者對汽車的選擇也不僅僅局限于空間、動力和油耗等傳統汽車的性能,汽車的智能化程度成為吸引消費者的重要因素。
如今,隨著汽車電動化、智能化、網聯化、共享化的發展,汽車電子設備的數量正處于指數級增長的態勢。汽車電子電氣架構的設計優化可以使汽車成本降低、性能提升、效率提高。
本文將簡要介紹汽車電子電氣架構的演變和發展,總結近年來主流汽車電子電氣架構在智能汽車中的應用,為汽車產業和學術界在智能化、電動化、網聯化、共享化的四化發展中構建汽車電子電氣架構提供參考。
1 汽車電子電氣架構基礎
1.1 汽車電子電氣架構概述
汽車電子電氣架構為車輛底層框架打下堅實基礎。如今的汽車底盤架構不僅僅是機械架構,為實現輔助駕駛功能和其它智能化功能整車上需要安裝大量的感應器、傳感器以及控制器,還需要大量線束將它們連接起來。汽車電子電氣架構的重要性就顯現出來了,汽車電子電氣架構將汽車上的各類傳感器、感應器、控制器和線束硬件和汽車上的軟件有機結合起來,使車輛的架構達到簡化的同時,還能夠提高運行效率。汽車電子電氣架構會隨著汽車功能的增多而隨之演變。
汽車電子電氣架構的開發包括需求定義、邏輯功能架構設計、軟件/服務架構設計、硬件架構設計、線束設計不同層面的開發。這些開發組成了汽車電子電氣架構開發的完整流程,需要多個部門的配合才能完成。通過這一完整開發流程,汽車整體的效率地得到了提升,布線的減少降低了造車的成本,車輛功能增多的同時保證了整車電子系統運行的穩定性。
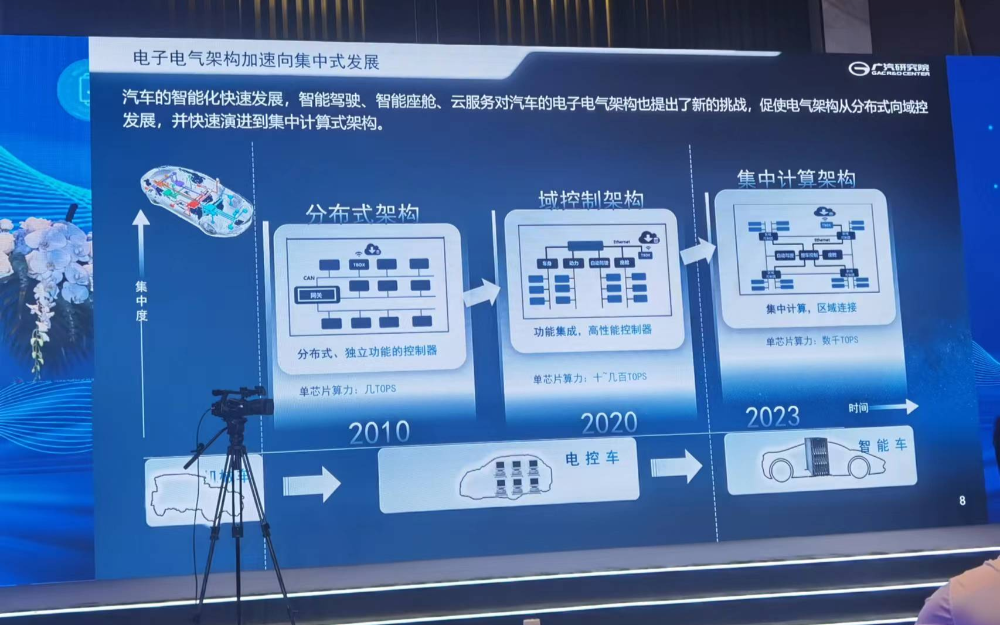
1.2 汽車電子電氣架構發展
1.2.1 電子電氣架構演變
汽車剛剛問世的時候,汽車上面的電子元器件數量不多,還沒有汽車電子電氣架構這一概念。直到上世紀五十年代,汽車開始初步形成簡易的電子電氣架構。經過四五十年的發展,汽車上各種音頻、視頻以及其他一些電子元器件先后出現,汽車電子電氣架構開始初具規模。直到2000年發布了新的架構標準、通信協議以及相關法律法規,汽車電子電氣架構的發展上了新臺階。
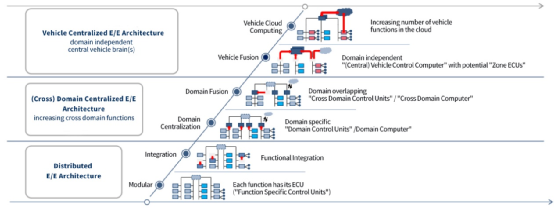
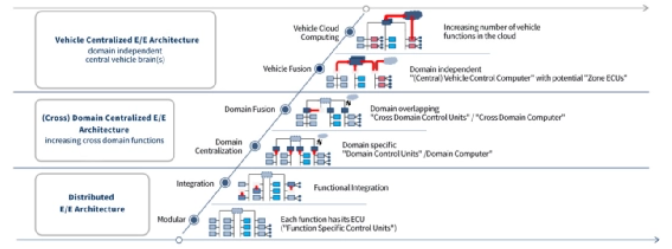
博世的電子電氣架構發展如圖1所示,清晰的展示了汽車電子電氣架構的發展歷程。從1970年左右的分布式電子電氣架構發展至今,集成化融合化發展已成為趨勢。傳統分布式架構是每個需求功能都需要一個ECU,隨著人們需求的增多,汽車上ECU的數量達到了100個以上。分
布式架構造成大量冗余,整車復用性低,使造車成本大大增加,不能適應發展需要。經過功能集成化、集中化發展,發展到了如今應用最廣泛的域集中式電子電氣架構,將整車劃分為了幾個區域,每個區域一個域中心控制器,也就是行業認可的域控制器。通過域控制器來實現輔助駕駛、車身控制以及汽車娛樂功能的局部集中化處理,減少了冗余,提高了效率。未來汽車電子電氣架構還會向車輛集中控制電子電氣架構發展。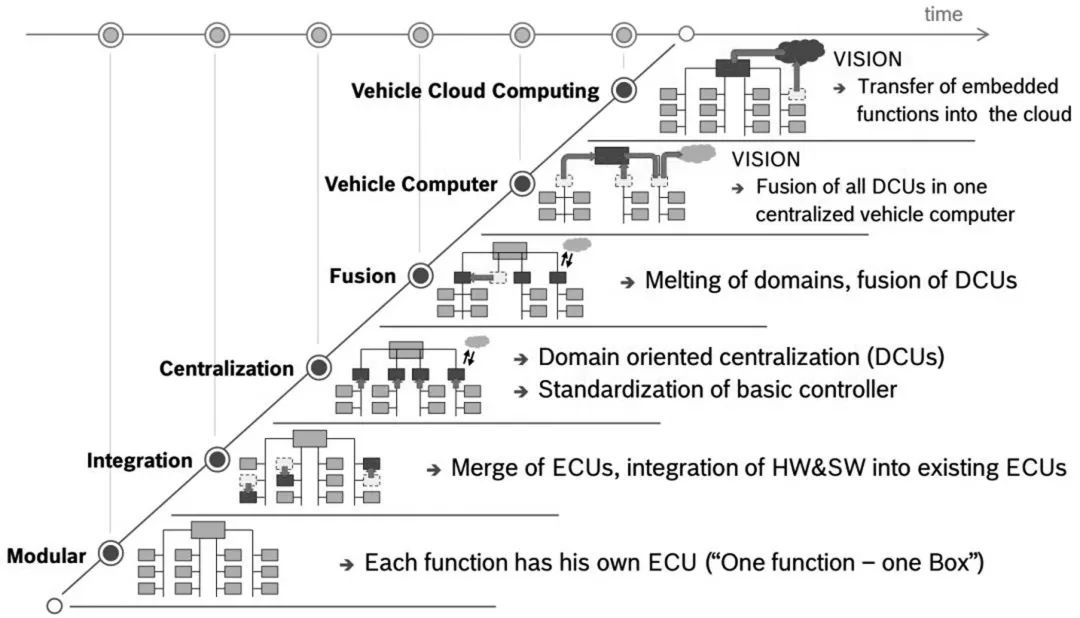
圖1 電子電氣架構演變
1.2.2 域控制器
在汽車電子電氣架構發展的過程中,域控制器是不得不被提及的。當前智能汽車上電子元件的數量增長非常顯著,僅僅依靠ECU已經不能滿足目前發展的需要。域控制器搭建了分布式汽車電子電氣架構向集成式汽車電子電氣架構的橋梁。
汽車電子按“域”劃分,傳統上這些域之間無論是機械、電氣還是控制上都是相互獨立的,如今這些域之間有了更多的交互。華南理工大學提出基于模型的面向L4自動駕駛級別,面向服務且具有協同計算能力的電子電氣架構。采用域控制器集中式架構,將電子電氣架構分為5個域,分別是車身控制域、智能駕駛域
1、智能駕駛域
2、信息娛樂域和新能源域
由以太網實現各個域控制器之間的信息交互,實現信息共享。高級輔助駕駛(Advanced Driver Assistance Sys?tem,ADAS)功能與車載網絡互聯功能的出現衍生出新的系統,比如高級駕駛輔助系統和駕駛員/行人安全系統、人機界面(Human Machine Interface,HMI)和遠程信息處理系統等。
當前,域控制器與傳感器還有各個功能執行器之間的數據集需要提前設定好。為保證自動駕駛過程的穩定性,電子電氣架構在設計之初就應該設定好汽車有幾個域,每個域的工作模式還有各個域之間的連接器跟傳感器的方式。根據域控制器功能的不同,具體的內部結構也有所不同,如圖2所示。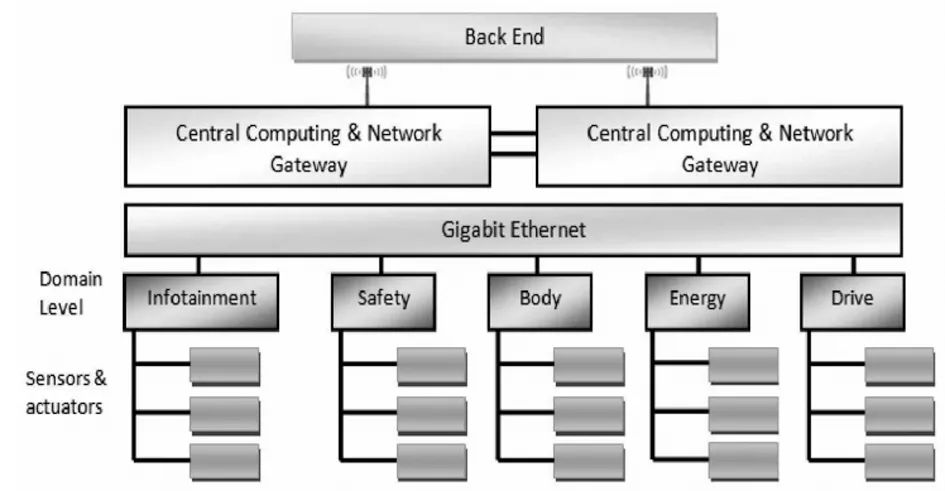
圖2 基于功能和中央網關的域控制器
隨著時代的發展,未來的汽車上面各個域的聯系必定會更加密切,例如底盤域和動力總成域、動力總成域和駕駛輔助域之間的聯系也會更加密切。
2 通信系統
2.1 總線系統
汽車電子電氣架構各個硬件間的信息傳遞需要依靠通信系統。在當代汽車架構中存在許多通信協議和通信技術,主要通信技術有5種:局域互聯網(Local Interconnect Network,LIN)、控制器局域網(Controller Area Network,CAN)、FlexRay總線、面向多媒體的系統傳輸(Media Oriented System Transport,MOST)、低電壓差分信號(Low-Voltage Differential Sig?naling,LVDS)。前4種是專門為汽車設計使用的,其主要特性如表1所示。 表1 各類總線特性表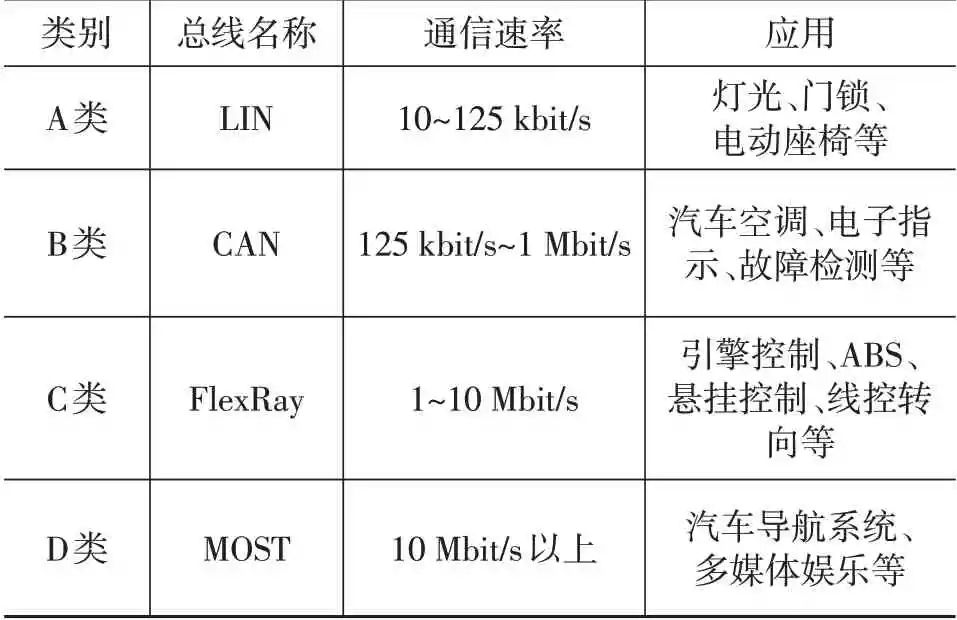
目前,汽車上運用最廣泛的仍然是基于CAN總線的車載總線系統,其優點如下。
(1)汽車中各電子部件通過CAN總線能夠實現信息共享,極大地提高了各電子部件獲取信息的能力;
(2)CAN總線采用“多主方式”的媒體訪問機制,總線中的各個節點相互獨立、互不干擾,即使某一節點出現故障,總線仍舊能正常工作,并且各節點公平享有主線使用權利;
(3)CAN總線采用雙線差分電壓的方式進行通信,且具備消息自動重發、CRC校驗、應答機制,總線通信的安全性和數據準確性有保障;
(4)CAN總線的最大通信速率為1 Mbit/s,通信速率比較高,實時性好;
(5)構建CAN總線網絡時,僅通過屏蔽雙絞線連接各個網絡節點就能達到較好的抗電磁干擾效果,成本低廉。
CAN的上述優點使其成為當前汽車上運用最廣泛的車載總線,但是隨著汽車行業的發展,汽車上智能駕駛等級不斷提高,汽車上電子元器件數量呈指數級上升,導致車輛上傳遞的報文數量越來越多,信息交換的次數大大增加,車載總線網絡負荷率增大,電子元器件之間的信息傳遞不穩定。CAN總線的不可預測性、傳輸速度慢和傳輸距離有限的缺點會在汽車通信網絡高負載時導致無法預測的問題,使行駛安全性得不到保障。
CAN總線在未來很長一段時間依然是最主要的車載通信網絡,但是需要對CAN總線網絡傳輸延時的問題進一步研究,進行仿真實驗、算法優化,提高CAN總線的實時性。同時,也不能僅僅局限于CAN總線,一些標準化協會、技術組織一直在推出各自的確定性網絡的實現機制,例如工業上廣泛運用的工業以太網、時間敏感型網絡(Time Sensitive Networking,TSN)、DetNet和時間觸發以太網(Time-triggered Ethernet,TTE)。
2.2 車載以太網
以太網技術的發展給人們的生活方式帶來了很大的進步,從以太網的發明到現在已經過去了大約半個世紀,以太網相關技術已經發展成熟。2013年寶馬公司在X5型號汽車上首次搭載車載以太網,邁開了車載以太網的第一步。車載以太網相較于總線網絡的優點如下。
(1)高帶寬、傳輸距離遠; (2)支持多種協議和功能; (3)適應未來發展趨勢; (4)無線功能。
由Bosch的車載通信網絡圖可以發現目前車載網絡的模式依然是CAN總線為主(圖3),車載以太網為輔。車載以太網在未來的智能汽車上重要性會不斷提高。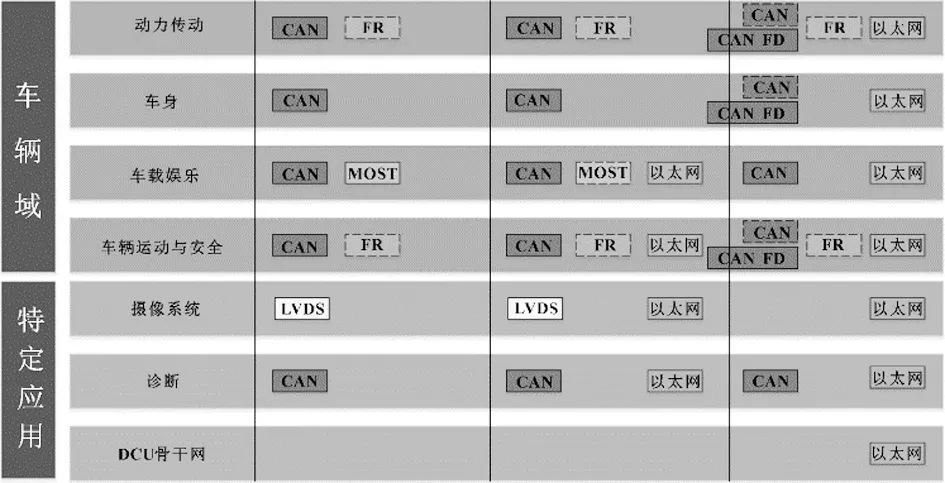
圖3 車載通信網絡
車載以太網的發展面臨的挑戰依然嚴峻,雖然各個標準化組織正積極推動其發展,但是各類標準的完善和落地還需時間。其次,當前推進車載以太網的配套開發工具、測試設備的力度依然不足。最后,車載以太網的使用必定會給汽車的信息安全保障帶來挑戰,這也是未來開發人員需要考慮的問題。
羅峰等已經提出一種車載網關防火墻保護車輛的CAN/FD和以太網總線。未來,CAN/FD和以太網將成為車輛的骨干網絡,大部分數據將通過這2個總線傳輸,因此,CAN/FD和以太網將更容易受到攻擊者的攻擊。車載網關是車輛的數據中心,它將CAN/FD與以太網連接在一起。
3 主流電子電氣架構
汽車電子電氣架構正處于由分布式發展到集中式的過渡階段,這是電子電氣架構發展的趨勢。各個廠家各自設計開發的電子電氣架構雖說都具有其特點,但也都是由分布式到集中式架構發展而不斷優化的。本節就根據設計理念的不同來介紹幾個廠家的電子電氣架構。
3.1 基于功能域控制器集中化的架構
博世作為整車Tier1供應商的重要代表,提出了未來智能汽車電子電氣架構的演進方向。從最開始的第1代模塊化架構經過集成化、中心化在經過模塊間的融合,再到形成行車電腦,將所有的域控制器融合到一個行車電腦上,最終發展到將每一臺汽車都連入車聯網,汽車不需要安裝行車電腦,所有的計算都將由云服務來完成,減少了整車的制造成本,提高了使用效率。
現在正處于第4階段到第5階段的過渡時期,在這一階段還是處于優化多域控制器的階段。 聯合電子設想未來汽車電子電氣架構分為3層,如圖4所示。聯合汽車電子設計的未來汽車電子電氣架構也是基于功能域控制器集中化的架構。上層是云計算,這是未來汽車發展大趨勢。中間層為計算與控制層,底層是標準化執行器和傳感器。計算與控制層是設計電子電氣架構中關鍵的一層,是連接云服務平臺和各個執行器傳感器之間的橋梁。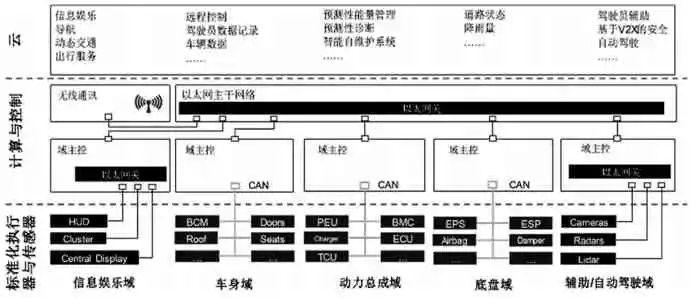
圖4 未來汽車電子電氣架構
3.2 基于區域控制器和中央計算的架構
豐田公司的中央/地方概念的電子電氣架構是在車身模型上面進行設計開發的。這樣設計的汽車電子電氣架構雖說本質上與其他廠家設計是一致的,這一架構突出了集中化中央計算的作用,也正是當前研發創新的重點方向。新一代的中央/地方架構有如下特點。
(1)動力上可最大限度地減少區域線路;
(2)網絡僅是局部變化,如通訊矩陣,也大大減少區域線路;
(3)安裝只需為附加ECU留出空間;
(4)邏輯上只需改變中央ECU的軟件。
特斯拉實現了“軟件定義汽車”,使汽車加速向移動的智能終端進化。2021年,特斯拉成為了全球車企中市值最高的車企,作為一個出世不久的品牌憑借幾款純電動汽車就達到了如此高度,最為關鍵的就是特斯拉主打賣點:智能化。特斯拉汽車的電子電氣架構有其獨到之處,從最早的Model S上的已經有了較為明顯的域劃分概念再到Model X開始出現跨網段特征,有比較明顯的多域控制器MDC趨勢,到如今最火爆的車型Model 3上實現向多域控制器階段的轉變,特斯拉的電子電氣架構達到了其它車企還未達到的高集成度。
3.3 基于環形主干網和多計算中心架構
安波福的智能汽車架構(Smart Vehicle Architec?ture,SVA)白皮書中提到SVA開發設計的3項基本原則。
(1)降低復雜性。通過簡化車輛內的硬件和軟件拓撲結構,減少了當前啟用各種功能所需的許多不同ECU之間的相互依賴性;
(2)統一不同的應用程序。SVA將來自車輛多個不同領域的軟件結合在一起,以解鎖新功能并改進生命周期管理;
(3)授權給原始設備制造商。SVA使原始設備制造商擁有完全控制相關主要軟件的能力(如定義車輛用戶體驗的軟件),并隨著時間的推移能夠不斷地增強其功能。
通過這3項基本原則來實現將軟件從硬件中分離的目的,并實現基于服務器計算的功能。
在SVA中,傳感器的信息獲取和處理位于車輛的乘客艙的中央,而不是分布在車輛的周圍(圖5)。這有助于降低系統總成本以及傳感器組件的成本,進而降低與傳感器相關、小事故相關的成本,從而降低保險成本。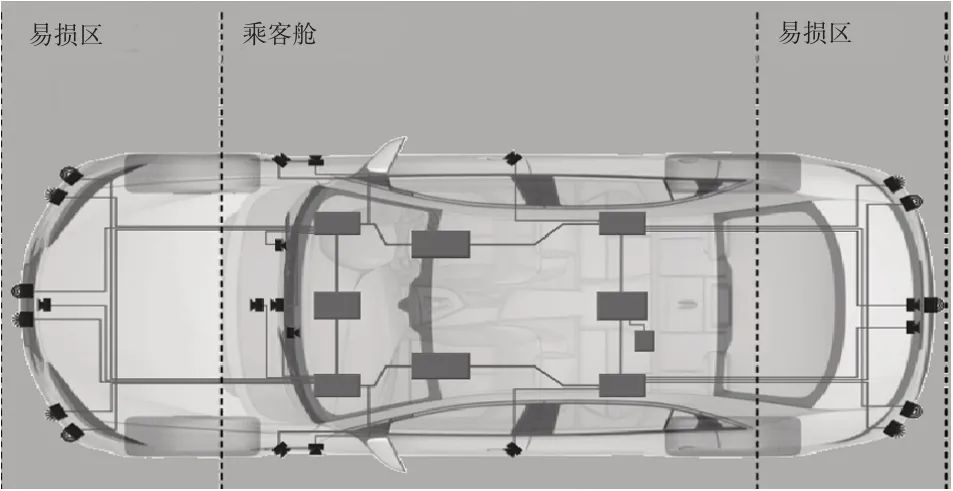
圖5 智能汽車架構
華為也在汽車電子電氣架構這一領域做出了貢獻。他們提出的CC架構如圖6所示,將汽車分為了3個區域。相比一般的汽車電子電氣架構域的劃分,這種劃分集成度更高,通過分布式網絡架構將3大區域連接。CC架構支持軟、硬件的升級,是未來汽車上不可或缺的功能。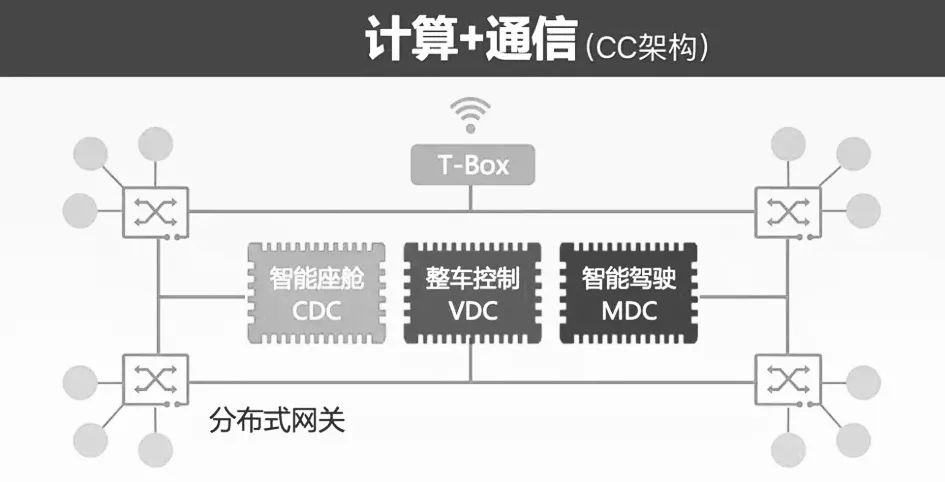
圖6 華為CC架構
4 結束語
汽車行業正在經歷從傳統汽車向智能汽車過渡的階段,汽車電子電氣架構也正處于分布式向集中式過渡的時期。從汽車廠家的發展方向可以看出,現在用戶對于汽車的追求已經不再滿足于動力性、駕駛平順性、燃油經濟性等傳統汽車性能。各個廠家研發設計的汽車電子電氣架構在結構上雖有些區別,但是發展的趨勢是相同的。未來汽車必定是聚焦智能化、電動化、網聯化、共享化方向發展,隨著汽車上電子元件數量的增多,汽車電子電氣架構的重要性顯得越發重要。
審核編輯:劉清


















 工商網監
工商網監
評論